基于Web of Science的国际极地机器人文献调研与分析
2015-05-25张幸华薇娜
张幸 华薇娜
(南京信息管理学院,江苏南京210046)
基于Web of Science的国际极地机器人文献调研与分析
张幸 华薇娜*
(南京信息管理学院,江苏南京210046)
利用Web of Science数据库,对国际极地机器人相关文献进行收集,并将收集到的文献按照各年文献量、文献类型、研究机构、研究地域分布等方面进行文献计量分析,同时介绍一些被引次数较高的高影响力文献。通过分析得到结论:极地机器人研究已经得到科学家学者的关注;美国研究机构是国际极地机器人研究的主要机构;南极是机器人应用与进行科学探测活动的重要领域。
极地机器人;Web of Science;文献计量学;南极;北极
极地环境的恶劣让科学家与学者对南北极的深入探索与研究变得十分困难,为了应对这样的困境,高科技设备的研发与应用应运而生,而极地机器人因其自主性操作与应对极端环境的高能力而受到科学家的关注。因此,有关利用机器人对极地地区进行探测的研究也越来越多。
Web of Science(简称WoS)是美国汤姆森科技信息集团基于Web开发的产品,是大型综合性、多学科、核心期刊引文数据库。本文选取WoS数据库下5个子数据库SCIE(Science Citation Index Expanded,科学引文索引扩展版——1900年至今)、SSCI(社会科学引文索引——1900年至今)、A&HCI(人文艺术科学引文索引——1975至今)CPCI-S(社会科学会议录论文引文索引——1900年至今)、和CPCI-SSH(人文及社会科学会议录论文引文索引——1900年至今),数据截止到2013年。使用South pol*、Antarcti*、Arctic*、North pol*等南北极名称以及周边海洋和岛屿King george、Bellinsgauzen Sea、Greenland、Beaufort sea等和机器人robot*相结合,同时采用具体被命名机器人,如Autosub*系列水下机器人、seagliders机器人等进行主题检索,排除主题词AERONET((AErosol RObotic NETwork,全球气溶胶探测网)以及不相关文献的影响,共检索得到192篇文献,其中会议论文的数量接近总文献量的2/3。这192篇文献涉及多个研究角度,包括对极地机器人本身的研发以及利用极地机器人收集的数据对极地天文、地理、海洋等领域进行探测的研究。
本文将以这192篇文献为样本文献,利用文献计量学的基本方法,从各年文献量、文献类型、研究机构、研究地域分布等进行统计分析,以期多方位地反映国际极地机器人的研究成果。
极地机器人是服务机器人的一种,根据国际机器人联合会(International Federation of Robotics)的定义,服务机器人是一种半自主或全自主工作的机器人,它能帮助人类完成除生产制造加工过程之外的设备。因此本文认为应用于极地科考探测的自主化设备均属于极地机器人的范畴[1]。
1 各年文献量统计与分析
文献量的年代变化是衡量科研成果的重要尺度之一,可以从中看出当前研究主题的科研产出情况和变化发展趋势。将极地机器人研究相关192篇文献按照出版年汇总,见图1。极地机器人相关的192篇文献中最早发表于1992年,最晚为2013年(由于2014年数据不完整,2014年的数据暂不列入分析)。
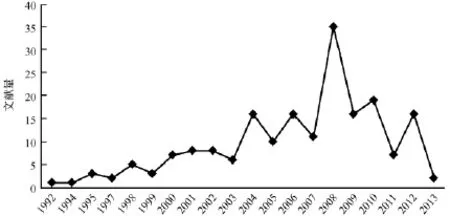
图1 年代文献量趋势图(单位:篇)(1993年、1996年、1997年文献量空缺)
从图1中可以看出,在1992-2013年的22年中,关于极地机器人研究的相关文献量总体上呈现增长趋势。2000年以后,文献量增长速度加快,2008年达到历史最高峰35篇,但在2008年之后存在比较明显的波动。
国际越来越关注极地机器人的研究,主要有两方面的原因:一是极地环境恶劣,在极地高危险区域下的地面科学观测缺乏成熟的技术手段,而极地资源的开发利用对政治经济又有一定的战略意义;另一方面机器人本身作为一种高技术装备,在一定程度上可代替科学家的作用,实现漫游、观测、采样、分析等功能,有利于极地科学考察[2]。
将极地机器人研究的相关文献量按年度进行归类,其结果如表1所示。

表1 年代文献量统计表
通过国际1992-2013年各年极地机器人文献量的统计,可以将其分为萌芽期、发展期、波动期。
1.1 萌芽期(1992-1999年)
由表1可见,1999年之前,各年文献量都不超过5篇,甚至有些年份出现空缺,这个阶段可以看作是极地机器人研究的萌芽时期。第一篇关于极地机器人研究的文献出现在1992年,由于发表时间较早,文献作者的所在国家和机构已不可考。这篇最早的极地机器人文献由SELTZER,R撰写并发表在CHEMICAL&ENGINEERING NEWS上的“Robot to probe inside Antarctic Volcano[3]”(机器人南极火山探险)注释类的文章,这篇文献介绍了由美国航天局机器人研制小组推出的新型八脚蛛形机器人“但丁”号,将在下周开赴南极纵深埃里伯斯火山实地考察,以此探明火山内部地质构造,同时检验机器人先进探测装置性能在极端温差环境下的工作状况,以期开拓星际探索的新篇章,同时鼓励科学研究者将更多的高科技投入到极地的探索中。
1.2 发展期(2000-2008年)
由表1可见,进入21世纪之后,关于极地机器人主题的研究文献呈现明显的增长趋势,2004年突破10篇,2007-2009年由于进入国际极地年,2008年更是达到了历史最高35篇。整个增长状态并不是连续稳定的,年度文献量有轻微的上下波动,但增长幅度大于下降幅度,而且整个阶段没有出现年份空缺,也说明在新世纪国际对极地机器人的研究也逐渐重视起来。在这一时期,关于极地机器人主题的相关文献共有117篇,其中美国发文44篇,占总发文量超过1/3,意大利29篇,英国18篇,其他各国的发文量均低于10篇,发文国家共计23个,参与研究国家已明显增多,但中国在发展期内并没有发表与极地机器人相关的文献。这117篇文献中被引最高的是由来自Univ Calif(美国加州大学)的Bishop,JKB、Davis,RE、Sherman,JT 3位作者在2002年合作完成并发表于Science(《科学》)上的“Robotic observations of dust storm enhancement of carbon biomass in the North Pacific[4]”(机器人观测北太平洋生物有机碳量与沙尘暴的关系)讲述了利用两台机器人在北太平洋观测并记录生物有机碳量来说明沙尘暴对海洋生物环境的影响,这篇文章被引频次达到了166次之多,最近一次被引是在2014年2月,说明这篇文献影响力非常大,一直倍受专家学者的关注。从研究角度来看,发展期发表的极地机器人相关文献研究主题集中在机器人项目的开发、机器人应用于极地观测天文收集数据为主,水下机器人研发用于探测深海海底也是这一时期的主题。
1.3 波动期(2009至今)
由图1可以发现,2009年文献量回落到20篇以下,并且出现了不小的文献量波动,2011年文献量减少到7篇,2012年又增加到16篇,而到了2013年仅有2篇关于极地机器人的文献。在波动期关于极地机器人研究的相关文献共有60篇,从这一时期的文献总量上来说,相比发展期数量并没有明显减少,只是相对2008年35篇文献量来说,文献量突减很多。究其原因,笔者猜测可能是2007-2009年召开的第四次国际极地年制定了综合发展极地科学研究的高新技术设备的目标,极地科学研究学者的关注点从机器人扩展到潜水艇、无人机、遥感、探测卫星等其他高科技设备应用的研究,同时由于召开国际极地年会议,与极地机器人相关的会议论文在2008年也有所增加,造成了2008年文献量最高峰的情况。在这一阶段的60篇文献中,美国发文24篇,澳大利亚发文13篇,英国发文11篇,中国发文10篇,其他国家发文量在10篇以下,这一时期涉及国家仅有12个,相比发展期减少了将近一半,说明极地机器人研究目前仍处在不稳定的发展阶段。然而波动期一个比较明显的变化是中国在2009年首次发表关于极地机器人研究的相关文献,由来自Nanjing Inst Astron Opt&Technol(中国科学院国家天文台南京天文光学技术研究所)的Gong,X等学者合作完成的“DOME A SITE TESTING AND FUTURE PLANS[5]”会议论文,这篇文献讲述了早在2005年一个中国科考队的队员第一个达到南极高原的冰穹A,并预计在2006年该处会成为最适合观测天文的选址,而后由于PLATO(天文选址自动观测站,由机器人设备自主完成选址)赞助,中国小型望远镜系列CSTAR在冰穹A的运行效果较佳,并在此基础上提出了未来关于探测极地天文的计划。从被引频次来看,这一阶段比发展期略有下降,被引频次在50次以上的仅有1篇,是由Rutgers State Univ(美国罗格斯大学)的Schofield,O等美国学者与British Antarctic Survey(英国南极调查局)的Meredith,MP合作完成并发表在SCIENCE(《科学》)上的“How Do Polar Marine Ecosystems Respond to Rapid Climate Change?”(极地海洋系统如何应对气候的快速变化)。从研究领域来看,这一时期除延续发展期对极地天文与极地水下机器人探测的关注之外,还增加了对气候对极地环境的影响探讨与新型机器人的研发。
2 文献类型分析
表2列出了国际极地机器人研究相关文献所属类型分布情况,不同类型的文献可以反映学者对极地机器人研究的不同切入点。
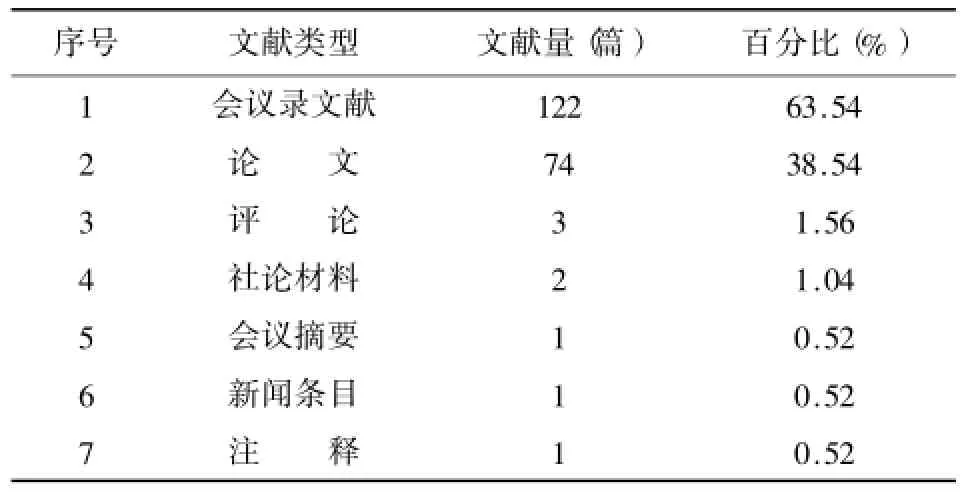
表2 文献类型分布表
2.1 会议录文献(Proceedings Paper)
会议录文献量达到122篇,占据总文献量的63.54%。其中IEEE International Conference on Robotics and Automation(IEEE机器人和自动化国际会议)在极地机器人研究的22年间共发表相关文献13篇,对国际极地机器人的研究投入了较大的科研力量。该国际会议至今已成功举办了30届,其中2001年韩国会议发表5篇与极地机器人相关文献,2005年西班牙巴塞罗那会议发表2篇相关文献,1998年比利时鲁汶会议、2006年美国佛罗里达州奥兰多会议、2008年美国加利福尼亚会议、2009年日本神户会议、2010年美国阿拉斯加州安克拉治会议以及2011年中国上海会议各发表了1篇相关文献。在这13篇文献中美国发文11篇,意大利1篇,中国1篇,其中引用次数最高的是2008年美国加利福尼亚会议上Georgia Inst Technol(美国佐治亚理工学院)的Howard,A M、Williams,S发表的“A single camera terrain slope estimation technique for natural arctic environments[6]”,到目前共被引用了5次,这篇文章描述了在北极科研环境的恶劣给人类和机器人探索带来强大阻碍的同时,提出可以使用装有一台摄像机的机器人坐标系来估计地形坡度的方法,这种方法目前已经被应用到模拟和真实还原北极地形图像中。中国发表的惟一一篇会议论文是在2009年日本神户会议上由Nankai Univ(中国南开大学)Yuan,J(苑晶)、Huang YL(黄亚楼)等学者发表的“Active Exploration Using Scheme of Autonomous Distribution for Landmarks[7]”,这篇文章系统的研究了缺乏陆标的地区(南北极)移动机器人动态自主分配陆标问题,并针对这一问题提出了独创性的机器人陆标分配准则,该文提出的方法可应用于大规模环境,使机器人以主动的、智能的和自适应的方式完成对未知区域的探索,尤其是在当前极地探索处于尚不成熟的时期,为后续极地机器人探索提供了可借鉴之处。
IEEE/RSJ International Conference on Intelligent Robots and Systems(IEEE/RSJ智能机器人与系统国际会议)也有3篇关于极地机器人的会议论文,其中美国2篇,加拿大1篇。2002年瑞士洛桑会议上来自Carnegie Mellon Univ(美国卡内基梅隆大学)的Urmson,CP等学者发表了“Stereo vision based navigation for sun-synchronous exploration[8]”一文,介绍了使用太阳能供电的机器人构建导航系统并最终实现机器人操作。2008年法国尼斯会议上Woods Hole Oceanog Inst(美国伍兹霍尔海洋学研究所)完成“Deep Sea Underwater Robotic Exploration in the lee-Covered Arctic Ocean with AUVs”。2009年美国圣路易斯会议上Dartmouth Thayer Sch Engn(加拿大达特茅斯学院塞耶工程学院)的学者发表“Development of an Autonomous Robot for Ground Penetrating Surveys of Polar Ice”。
另外GROUND-BASED AND AIRBORNE TELESCOPES会议、ARENA CONFERENCE ON AN ASTRONOMICAL OBSERVATORY AT CONCORDIA会议、OCEAN会议以及IEEE/OES AUTONOMOUS UNDERWATER VEHICLES会议等也有较多涉及到极地机器人的文献。
2.2 论文(Artical)
极地机器人研究相关论文文献量达到74篇,占总文献量的38.54%。表3列出了论文文献的来源期刊分布情况。国际极地机器人研究领域有3篇文献发表在高影响力的期刊SCINECE(《科学》,影响因子为31.027),其中来自Univ Calif(美国加州大学)的Bishop,JKB、Davis,RE、Sherman,JT 3位作者在2002年合作完成的“Robotic observations of dust storm enhancement of carbon biomass in the North Pacific”(机器人观测北太平洋生物有机碳量与沙尘暴的关系)引用频次高达166次;而另外一篇由British Antarctic Survey(英国南极调查局)、Marine Lab Aberdeen(苏格兰渔业部海洋研究所)、Open Univ(英国公开大学)以及Southampton O-ceanog Ctr(英国南安普顿国家海洋学中心)4所英国机构合作的“Antarctic krill under sea ice:Elevated abundance in a narrow band just south of ice edge[9]”(南极海冰下的磷虾:海冰边缘南面较窄区域内的资源丰度)引用次数达到了102次,这篇文章介绍了使用水下机器人Autosub-2进行海冰探测磷虾的分布情况;“Robotic observations of enhanced carbon biomass and export at 55 degrees S during SOFeX”也不逊色,引用次数为64次。对于极地机器人的科学研究,这些高被引文献都较有参考价值,值得专家学者深入研究。与机器人研究最相关的期刊JOURNAL OF FIELD ROBOTICS(影响因子为2.152)共刊载了极地机器人研究相关文献5篇,涉及美国研发的惟一有能力进行南极长途运输的“Yeti Polar Rover”机器人、由Woods Hole Oceanog Inst(美国伍兹霍尔海洋学研究所)等机构研制的两台最新的水下机器人“美洲豹Jaguar”和“美洲狮Puma”以及由Dartmouth Coll(美国达特莫斯学院)研制可进行冰河和大气取样研究工作的“Cool Robot”以及可远程控制的冰川测量机器人等。
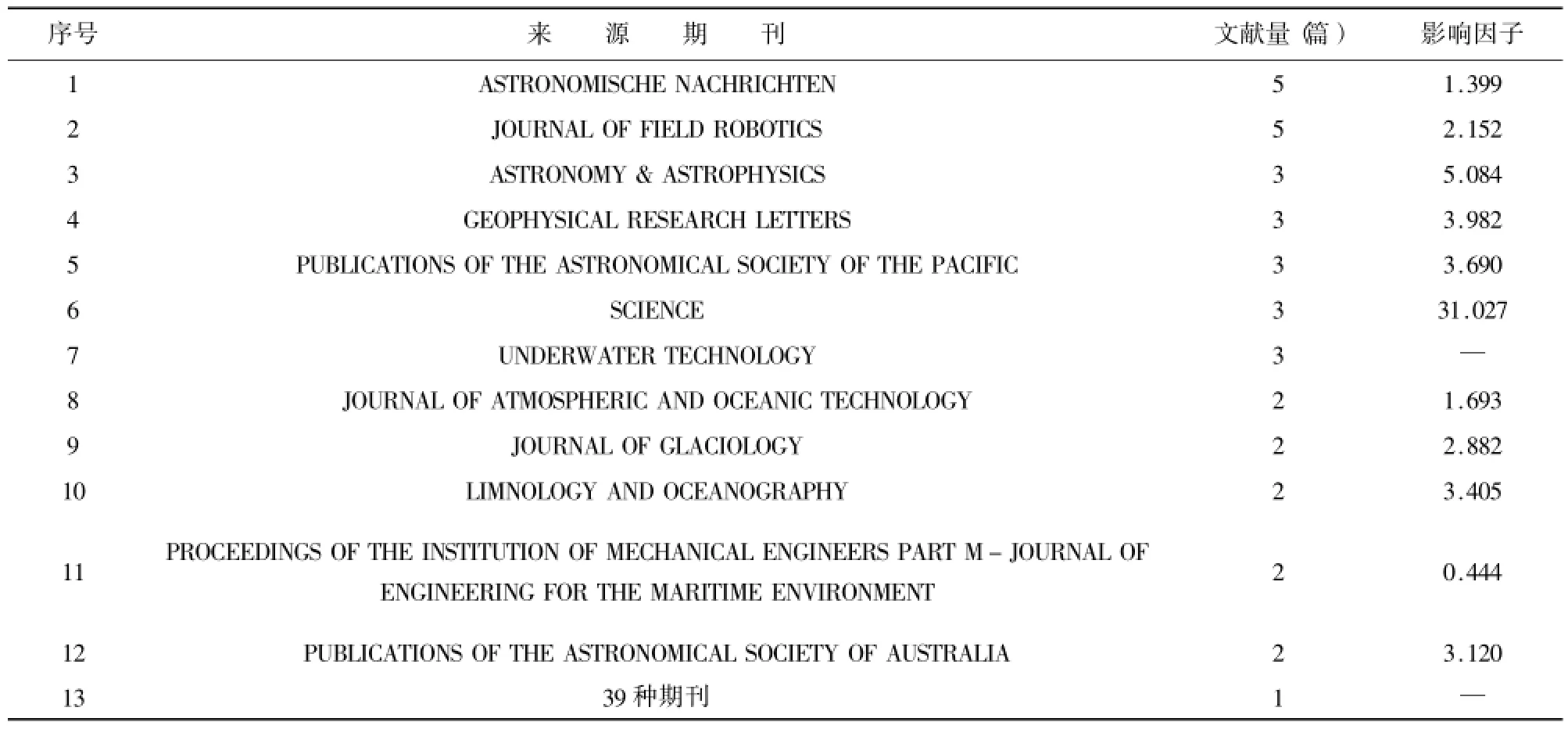
表3 来源期刊统计表
2.3 评论(Review)
关于国际极地机器人研究的评论共有3篇。2009年 CALTECH(美国加州理工学院)的Leu,MT和Keyser,LF就机器人飞船在南极臭氧洞被发现的基础对地球大气层进行遥感检测相关研究发表了“Vapor-deposited water and nitric acid ices:Physical and chemical properties[10]”一文。2010年由Rutgers State Univ(美国罗格斯大学)的Schofield,O等美国学者与British Antarctic Survey(英国南极调查局)的Meredith,MP合作完成了评论式文献“How Do Polar Marine Ecosystems Respond to Rapid Climate Change?[11]”(极地海洋系统如何应对气候的快速变化),引用次数达到62次,该文探讨了气候变化将在哪些当面影响海洋生态系统,并提出希望借助机器人、卫星、船舶等设备来收集可改善数值模型的数据,并以此来研究未来极地生态系统将会随着气候变化发生那些改变。2011年由Norwegian Polar Res Inst(挪威极地研究多)、Univ Bergen(挪威卑尔根大学)、Alfred Wegener Inst Polar&Marine Res(德国阿尔弗雷德·魏格纳极地与海洋中心)以及Faroes Marine Res Inst(丹麦法罗海洋研究所)等机构合作文献“Closing the loop-Approaches to monitoring the state of the Arctic Mediterranean during the International Polar Year 2007-2008[12]”,该评论描述在2007-2009年国际极地年召开之后,北极新时代已经越来越近的大背景下,深入分析了北极海冰迅速消融给北极探索监测系统带来的巨大挑战,总结了目前跨学科应用的数据集及成果,并且付诸行动,使用“Sea gliders”机器人等高科技设备进行北极海底探测,最终认为北极海洋观测系统的一个重要组成部分是通过机器人等设备从海洋内部实时获取数据。
2.4 其他类型文献
由表2可知,国际极地机器人研究相关文献除会议录文献、论文以及评论这几种较为常见的文献类型外,还涉及了两篇社论材料类文献、一篇会议摘要、一篇新闻条目以及一篇注释类型的文献。
两篇社论材料类文献中,2008年发表的文献是关于冰冻圈的科学探测“Guest editorial:Cryospheric science and engineering”一文,这篇文章是由Cold Reg Res&Engn Lab(美国陆军工程兵寒冷地区研究和工程实验室)的Albert,MR和Univ Delaware(美国特拉华大学)的Geiger,CA合作完成,并刊载在COLD REGIONS SCIENCE AND TECHNOLOGY期刊,主要涉及关键词有极地科学、极地工程、冰冻圈工程、机器人、冰芯等;另外一篇是在2012年由美国的4所机构Univ Delaware(美国特拉华大学)、Univ San Luis Obispo(美国圣路易斯欧比斯普分校)、Polar Oceans Res Grp(美国极地海洋研究组织)以及Rutgers State Univ(美国罗格斯大学)共同完成并发表在OCEANOGRAPHY上的“Letting Penguins Lead:Dynamic Modeling of Penguin Locations Guides Autonomous Robotic Sampling[13]”,主要是关于机器人自主采样进行动态建模确定企鹅栖息地。
会议摘要是在加拿大举办的Oceans 97 MTS/IEEE Conference(1997年海洋技术会议)上发表的“LONTalk as a standard protocol for underwater sensor platforms[14]”,该文简明扼要的概括关于水下设施Autosub系列机器人在极地的应用情况。
WoS收录并发表于2011年的新闻条目是“ROBOT DIVES TO EXPLORE ANTARCTIC ICE SHELF”(机器人潜水探索北极冰架),该文匿名发表在BULLETIN OF THE AMERICAN METEOROLOGICAL SOCIETY。
惟一的一篇注释类型的文献是极地机器人探索的第一步,发表于1992年,由SELTZER,R撰写并发表在CHEMICAL&ENGINEERING NEWS上的“Robot to probe inside AntarcticVolcano”(机器人南极火山探险)注释类的文章,主要是关于机器人“但丁”号再南极火山的探险活动。
3 机构分析
3.1 主要机构分析
表4文量不低于5篇的16所作者机构,从中可以了解国际极地机器人研究水平较高的重要机构。这16所作者机构中,7所来自美国,3所来自英国,3所来自意大利,另外中国、澳大利亚、德国均有1所机构,可见美国在极地机器人研究领域的绝对优势。
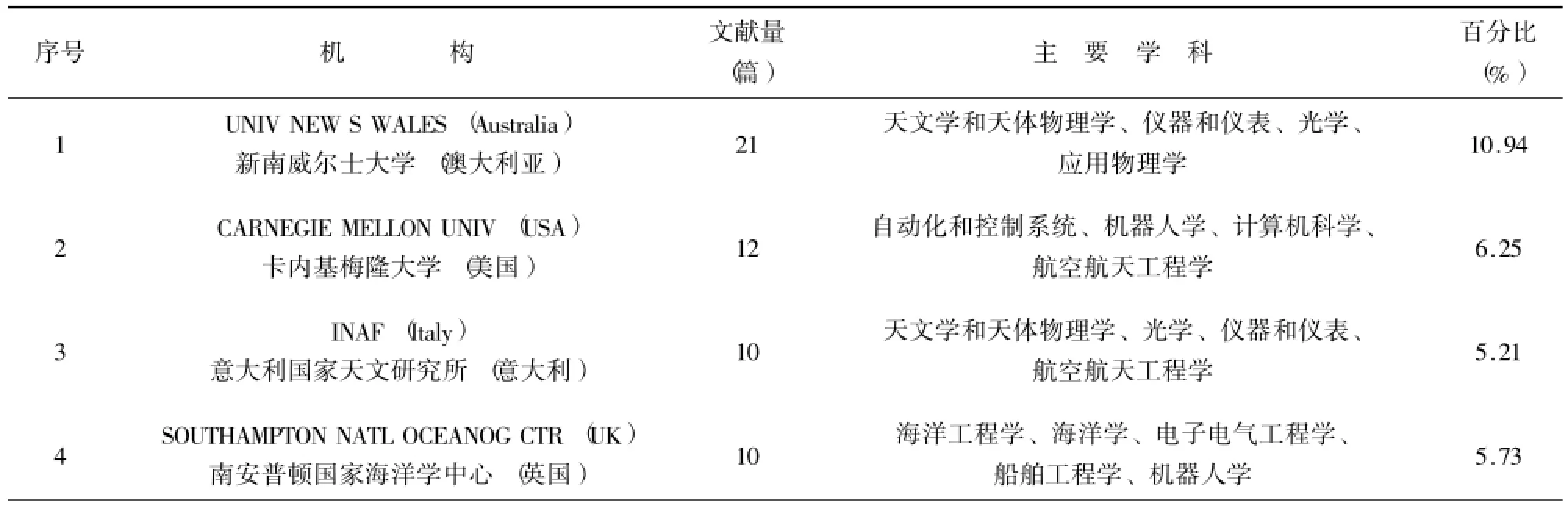
表4 作者机构分布表(文献量>=5)
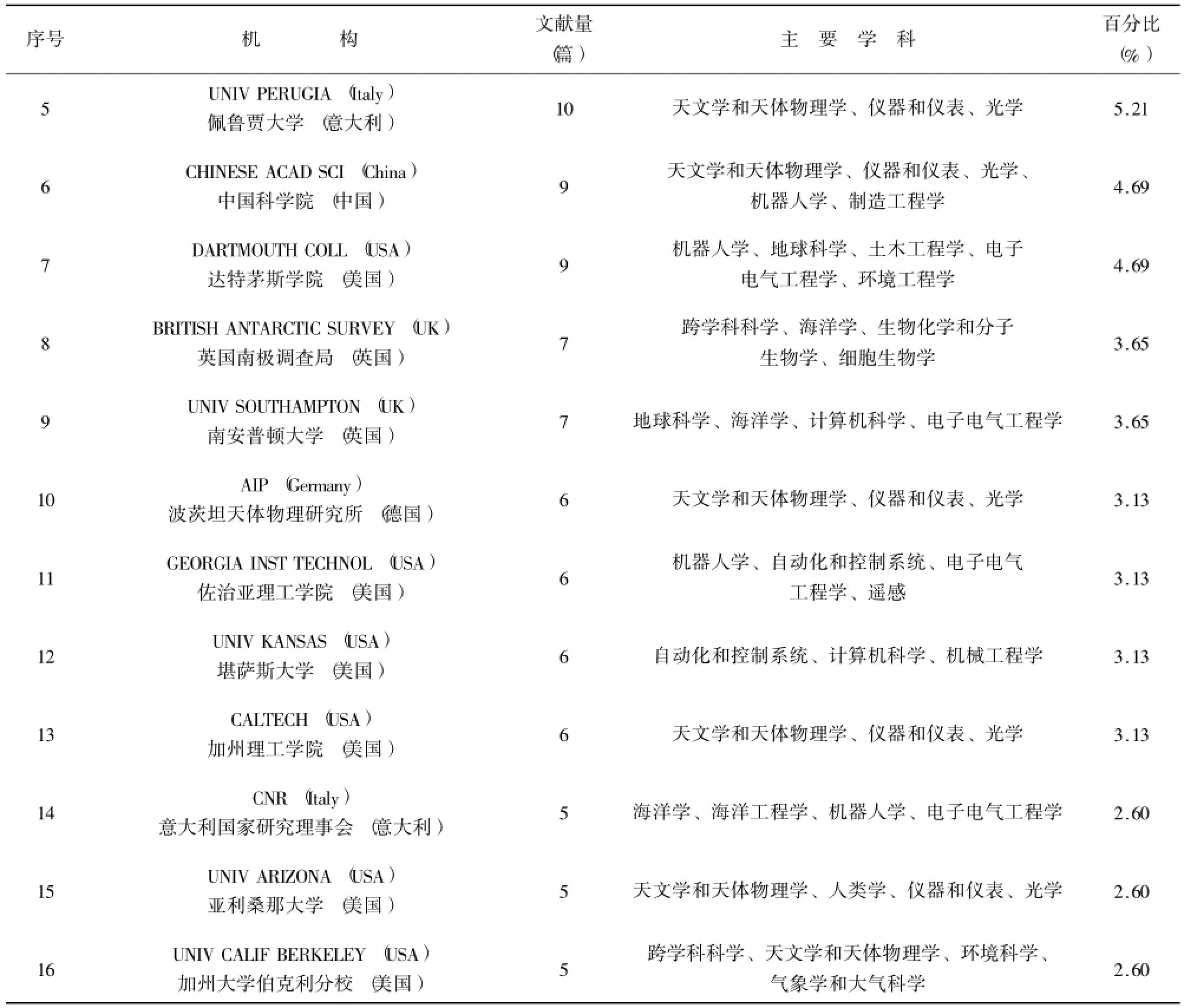
表4 (续)
从发文量看,UNIV NEW S WALES(澳大利亚新南威尔士大学)是国际极地机器人研究的主要机构,发文量为21篇,文献涉及的主要学科领域包括天文和天体物理学、仪器和仪表、光学、应用物理学等。位于新南威尔士大学之后的CARNEGIE MELLON UNIV(美国卡内基梅隆大学)和SOUTHAMPTON NATL OCEANOG CTR(英国南安普顿国家海洋学中心)也不甘示弱,发文量分别为12篇、10篇,占总文献量的6.25%、5.73%,其中美国卡内基梅隆大学关于极地机器人的研究涉及的主要学科领域有自动化和控制系统、机器人学、计算机科学、航空航天工程学等,英国南安普顿国家海洋学中心涉及的主要学科领域则包括海洋工程学、电子电气工程学、船舶工程学、机器人学等,这两所研究机构更侧重于极地机器人的设计与研发。文献量分别位居第四和第五的UNIV PERUGIA(意大利佩鲁贾大学)和INAF(意大利国家天文研究所)发文10篇。在位居前五的研究机构中,意大利占据两席之地,表明了意大利在国际极地机器人研究领域的科学投入与产出相对较多。CHINESE ACAD SCI(中国科学院)发文量也达到了9篇之多,占据总文献量的4.69%,涉及到机器人学、制造工程学等学科,其中中科院沈阳自动化研究院设置了机器人学国家重点实验室极地机器人项目组,先后研制了三代极地漫游机器人,为中国的极地科研付出了努力。
3.2 合作机构
为了体现机构间的合作情况,使用Netdraw绘制机构合作网络图,如图2所示。图中的节点表示机构,连线表示其两端的机构合作,节点的大小表示机构的中心度,即与之有合作关系的机构越多,其节点越大;连线的粗细表示机构合作次数的多少,连线越粗,其两端的两所机构合作次数越多。
由图2可以看出,极地机器人研究领域主要机构合作有以下特点:①尚有5所机构还未与其他任何机构达成合作关系;②英国国内机构合作密切,主要是以英国南极调查局为核心,包括南安普顿大学及南安普顿国家海洋学中心等机构的合作团队,目前尚未与其他国家机构存在合作;
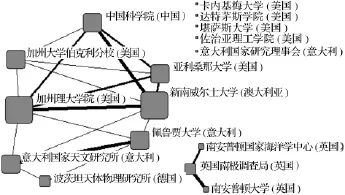
图2 机构合作网络图
4 南北极文献分布情况
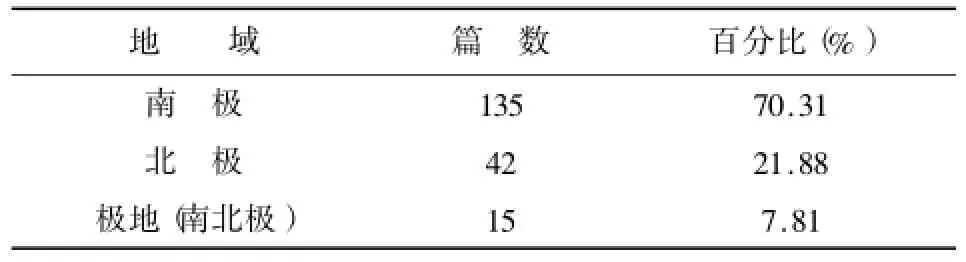
表5 极地机器人在南北极的文献量分布表
表5列出了国际极地机器人在南北极地域上应用的相关文献量的分布情况。其中涉及南极机器人的研究占据了总文献量的70.31%,涉及北极机器人研究的文献只有21.88%,而有7.81%仅指明是极地机器人研究,没有区别南北极。由此可以发现到目前为止,国际上对于极地机器人的研究,更多的是应用在南极科学研究中,对于北极则涉及较少。
南极机器人研究的135篇文献中,有大半是关于PLATO(Plateau Observatory,天文选址自动观测站),该观测站配置全自动化设备,以机器人模式进行操作,在南极寻找观测天文现象的最佳位置;另外IRAIT(International Robotic Antarctic Infrared Telescope,国际机器人南极红外望远镜)项目也有诸多在南极的研究,它是欧洲第一个设置在南极高原的红外望远镜,以机器人的形式自动观测并记录天文现象数据;此外还涉及了一些专门为探测南极而研制的机器人及其在南极的应用。例如,美国“Polar Rover Yeti”机器人在南极冰盖站探测地球气候历史情况;中国科学院沈阳自动化研究机器人学国家重点实验室设计了三代南极流动站,为人类和移动机器人执行南极任务提供便利;Autosub系列水下机器人;“Endurance”水下机器人用以探测南极海冰;太阳能“Cool”机器人的研发说明了极地研究迫切需要机器人科学的重要性;英国“ISIS”机器人对南极深海进行探测等等。
[1]科技部.《服务机器人科技发展“十二五”专项规划》解读[J].机器人技术与应用,2012,(3):6-9.
[2]李丙瑞,秦为稼,郭井学,等.智能机器人技术在南极科学考察事业中的试验应用[J].极地研究,2009,21(4):336-343.
[3]SELTZER,R.Robot to probe inside Antarctic Volcano[J].Chemical&Engineering News,1992,70(51):4-5.
[4]Bishop JKB,Davis RE,Sherman JT.Robotic observations of dust storm enhancement of carbon biomass in the North Pacific[J].Science,2002,298(5594):817-921.
[5]Gong X,Wang L,Cui X,etc.DOME A SITE TESTING AND FUTURE PLANS[C]∥3rd ARENA Conference on Astronomical Observatory at CONCORDIA(Dome C,Antarctica).France:[s.n.],2009,40:65-72.
[6]Howard A M,Williams S.A single camera terrain slope estimation technique for natural arctic environments[C]∥IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION.USA:IEEE,2008:2729-2734.
[7]Yuan Jing,Huang Yalou,Sun Fengchi,Tao Tong.Active Exploration Using Scheme of Autonomous Distribution for Landmarks[C]∥IEEE International Conference on Robotics and Automation-ICRA. USA:IEEE,2009:173-178.
[8]Urmson CP,Dias MB,Simmons RG.Stereo vision based navigation for sun-synchronous exploration[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems VOLS 1-3.USA:IEEE,2002:805-810.
[9]Brierley AS,Fernandes PG,Brandon MA,etc.Antarctic krill under sea ice:Elevated abundance in a narrow band just south of ice edge[J].Science,2002,295(5561):1890-1892.
[10]Leu Ming-Taun,Keyser Leon F.Vapor-deposited water and nitric acid ices:Physical and chemical properties[J].INTERNATIONAL REVIEWS IN PHYSICAL CHEMISTRY,2009,28(1):53-109.
[11]Schofield Oscar,Ducklow Hugh W,Martinson Douglas G,etc. How Do Polar Marine Ecosystems Respond to Rapid Climate Change?[J].Science,2010,328(5985):1520-1523.
[12]Mauritzen C,Hansen E,Andersson M,etc.Closing the loop-Approaches to monitoring the state of the Arctic Mediterranean during the International Polar Year 2007-2008[J].PROGRESS IN OCEANOGRAPHY,2011,90(1-4):62-89.
[13]Oliver Matthew J,Moline Mark A,Robbins Ian,etc.Letting Penguins Lead:Dynamic Modeling of Penguin Locations Guides Autonomous Robotic Sampling[J].OCEANOGRAPHY,2012,25(3):120-121.
[14]Smith SM,McPhail S,Healey A,etc.LONTalk as a standard protocol for underwater sensor platforms[C]∥Oceans 97 MTS/IEEE Conference.USA:IEEE,1997:267-267.
(本文责任编辑:郭沫含)
关于北极机器人研究的42篇文章,利用机器人对格陵兰岛的探测应用较多,其次是对北极深海、北冰洋以及北极地中海的水下探测活动,这些科学探索涉及到的机器人有“Seagliders”机器人、远程控制glacier调查机器人、英国“ISIS”机器人、美国Autosub系列机器人、“hobby”机器人以及Aerosonde机器人等等。另外还有一些小型未被命名的机器人系统收集北极科学数据信息以及探测雷达数据。
未区分南北极的极地机器人研究的文献量较少,主要是系统描述在极地探索应用机器人的必要性与可操作性。从极地探索与机器人研制的历史长期发展和先验理论的指导下,系统论述机器人在极地科学研究中的优势,并将机器人在极地的应用从陆地操作扩展到水、冰、陆、空操作,同时考虑到极地恶劣的环境和天气对人类进行科学探索的阻碍,机器人在极地的应用在很大程度上将得到推广。
5 结语
通过对WoS数据库收录的极地机器人相关文献的统计分析,笔者得出以下结论:
(1)通过对论文年代分布进行研究,发现极地机器人相关文献的数量从最早出现相关文献之后有了一个较快的发展时期,目前虽然文献量波动较大,但是极地机器人在南北极的科学应用已然引起了科学家学者的重视,可以预测将会有更多的机器人被研发以用于极地探测。
(2)通过文献类型的分析,发现极地机器人相关文献中会议论文是重中之重,由此也可以看出偏向应用方向的文献大多围绕相关会议开展,其中IEEE International Conference on Robotics and Automation会议是机器人行业中的重要会议。
(3)通过对研究机构进行研究,发现美国是极地机器人相关研究的优势国家,美国的卡内基梅隆大学以及达特茅斯学院、澳大利亚的新南威尔士大学、英国南安普顿国家海洋中心、意大利佩鲁贾大学以及中国科学院是极地机器人研究的主要机构。另外英国国内机构间的合作较为密切,中国科学院与澳大利亚新南威尔士大学、美国加州理工学院及美国亚利桑那大学之间的合作是一个连通图,且合作力度较大。
(4)通过对极地机器人相关文献在南北极的研究分布情况的研究,发现机器人研究更多应用在南极,而北极虽有涉及,但文献量并不多,大多是机器人应用于北冰洋、北极地中海的水下探测活动。这种分布现象与国际对南北极的关注研究侧重是一致的,期望未来能有更多的机器人被研发用于北极探测活动。
总之,本文主要通过极地机器人相关文献的重点介绍与研究机构分布,较全面了解极地机器人相关研究情况,希望中国的极地机器人研究可以多多借鉴国外的科研成果。
Bibliometric Study of Literatures on International Polar Robotics Based on Web of Science
Zhang XingHua Weina*
(School of Information Management,Nanjing University,Nanjing 210046,China)
A bibliometric analysis was conducted based on collection of literatures on international polar robotics research from the database of Web of Science.The study included chronological distribution,document type,research institutions,research territory.Meanwhile,high influence literratures which have been cited lots times were introduced.Some conclusions has been made:The polar robotics research has gained the attention of scientists and scholars;American research institute is the main mechanism of international polar robotics research;Antarctic is the important areas that apply robots to scientific exploration activities.
polar robot;Web of Science;bibliometrics;antarctic;arctic
10.3969/j.issn.1008-0821.2015.03.023
G250.252
A
1008-0821(2015)03-0129-07
2014-10-21
2014年国家海洋局极地专项办“南北极环境综合考察与评估专项”子专题“极地科技发展战略研究”中课题四“极地科技论文分布与极地大国的研究优势”(项目编号:CHINARE2014-04-05-03-04)研究成果之一。
张幸(1991-),女,硕士研究生,研究方向:信息检索、社会科学研究评价。
华薇娜(1955-),女,教授,研究方向:信息检索、社会科学评价研究。
