高速电主轴块控自适应反演控制
2015-05-25单文桃陈小安
单文桃,陈小安
(1.江苏理工学院机械工程学院,江苏常州213001;2.重庆大学机械传动国家重点实验室,重庆400044)
高速电主轴块控自适应反演控制
单文桃1,陈小安2
(1.江苏理工学院机械工程学院,江苏常州213001;2.重庆大学机械传动国家重点实验室,重庆400044)
针对高速电主轴驱动控制系统的不确定性,强耦合,非线性等难点,提出基于智能RBF调节神经网络的高速电主轴块控自适应反演控制方案。采用李雅普诺夫稳定性理论推导出主轴系统的控制律和参数自适应律,主轴转子转速及磁链跟踪显示出优良的瞬态性能并且能够对附加扭矩干扰以及主轴系统的不确定性具有较强的鲁棒性。仿真结果验证了此方案的有效性和合理性。
电主轴;径向基函数神经网络;反演控制;非线性
以微分几何为数学工具发展起来的反馈线性化处理方法和具有构造性特点的反演设计方法合称为非线性控制领域的两大突破。反演控制设计方法由于其独特的构造性设计过程和对非匹配不确定性的处理能力在飞机、导弹、电机、机器人等领域控制器设计中得到了广泛的应用。当处理具有一般形式的有界不确定性时,如果不确定性的界未知,反演成为一种无须自适应就能获得系统有界性的关键工具。如果系统中的不确定性为未知常值时,自适应反演是一种更合适的反演形式。
近年来,Polycarpou应用自适应反演的思想,针对一类含有非匹配不确定性的非线性系统,提出了一种基于神经网络的自适应控制器,可以保证闭环系统的半全局稳定性[1]。Kwan等[2]通过反演研究了机器人系统的鲁棒神经网络控制技术。Ge等[3]将神经网络自适应反演方法推广应用到非自制严格反馈系统。Zhang等[4]针对严格反馈非线性系统,应用反演设计提出了一种神经网络自适应控制方法,这种方法能够保证闭环自适应控制系统的一致最终有界稳定性。反演设计方法通常需要假定非线性系统中的位置参数具有线性参数化的形式,并且系统中的非线性函数必须精确已知。为了克服线性参数化问题,Karsenti等[5]通过引入一阶泰勒近似,解决了要求线性化参数的问题,但他们的方法对非线性函数的描述是必需的。为了同时克服以上困难,Knohl等[6]针对一类单输入单输出非线性参数化严格反馈非线性系统,应用反演设计提出了一种基于人工神经网络非线性自适应控制方法,但这种方法只能保证当激励不受约束时闭环系统的稳定性。神经网络由于具有逼近非线性函数的特性,引起来很多学者的广泛关注,在反演自适应控制领域也得到了广泛应用[7-9]。
基于上述研究概况和基础,通过观察主轴电机的动态数学模型[10],发现其模型呈多输入多输出高阶非线性,这就导致了主轴系统复杂而难以控制,为此可以通过对原主轴系统进行线性变化,将其化为较简单的块控标准型,之后再采用适当方法对各简单块进行控制。通过引入一个修正的李雅普诺夫函数,首先假设对一阶系统提出一种光滑的非奇异自适应控制器,然后将这一方法推广到主轴一类高阶非线性系统,利用神经网络来逼近控制其中未知的非线性函数,再利用反演设计方法得到最终的控制器。因此,采用块控自适应反演方法可以推导出高速电主轴系统控制率和参数自适应率。智能RBF(Radial Basis Function)调节神经网络就是调节RBF神经网络权值的同时调节中心点值和影响范围,因此智能RBF调节神经网络具有更强的在线逼近能力和自适应性。研究针对高速电主轴驱动控制的不确定性,强耦合,非线性等难点[11],提出了基于智能RBF调节神经网络的高速电主轴块控自适应反演控制方案。采用块控自适应反演方法推导出主轴系统的控制律和参数自适应律,使控制器能够补偿参数变化所引起的控制偏差,确保主轴电机转子准确地跟踪给定位置信号。
1 高速电主轴动态数学模型的建立
由于高速电主轴是一个高阶、非线性、强耦合的多变量混合系统,内部存在复杂的机、电、磁、热耦合关系,在建立高速电主轴动态数学模型时,需做如下假设:
(1)设三相绕组对称,空间互差120°电角度,所产生的磁动势沿气隙圆周按正弦规律分布,并忽略空间谐波的影响;
(2)忽略磁路饱和,绕组的自感和互感都是线性的;
(3)忽略铁耗的影响;
(4)不考虑频率和温度变化对绕组的影响。
在上述假设的基础上,结合电机学原理,高速电主轴的实际物理模型(见图1)。
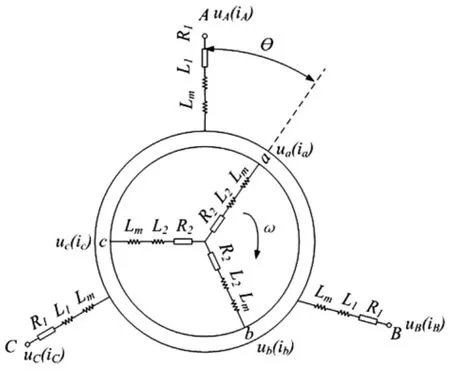
图1 高速电主轴的等效物理模型Fig.1 The equivalent high-speed motorized spindle physicalmodel
图1中:uA、uB、uC、iA、iB、iC分别为定子三相绕组相电压和相电流的瞬时值;ua、ub、uc、ia、ib、ic分别为转子绕组等效后的相电压和相电流的瞬时值;R1、R2分别为定子和转子单相绕组的电阻;L1、L2分别为漏磁通产生的定子和转子自感;Lm为定子和转子的互感;θ为定子A轴与转子a轴之间的电角度差。
根据M-T坐标系中的电气方程和机械方程组成的运动方程,可得到主轴电机在转子磁场定向M-T坐标系中的状态方程[12]为
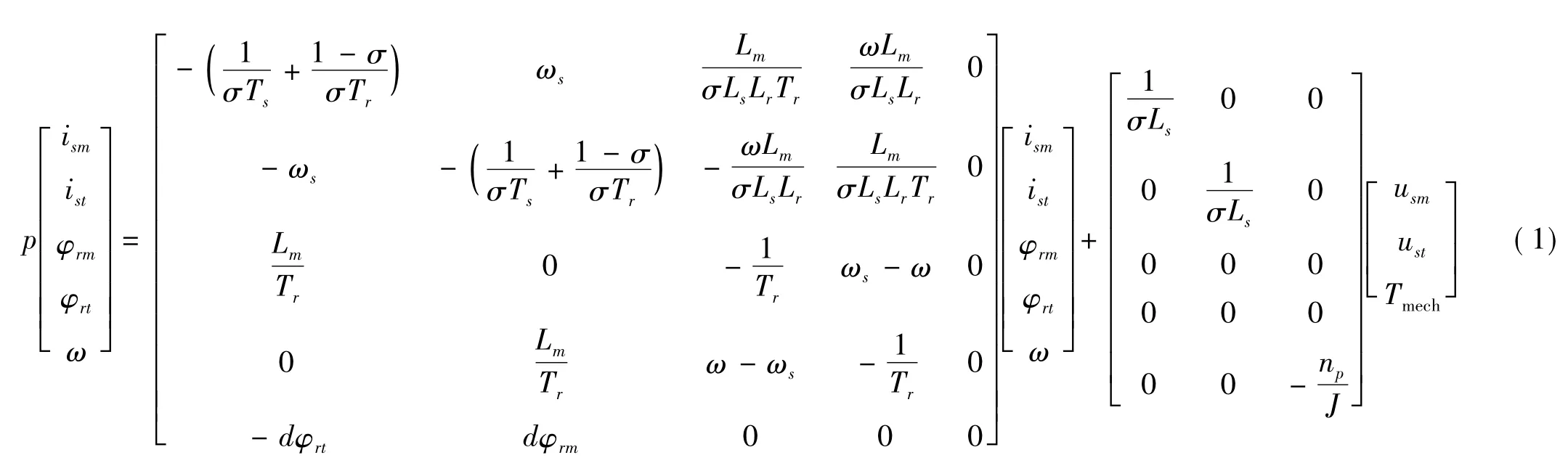
式中:i,φ,u,R,ω分别为电流,磁链,电压,电阻和转速;下标s和r为定子和转子;m和t为转子磁链坐标系中两个垂直分量;Lm,Ls,Lr分别为互感、定子自感和转子自感;np为电机极对数;J为转动惯量;Tr电机的励磁时间常数;σ为电机漏感系数;ωs为同步角速度,ωs=ω+ωf;φrm,φrt为磁链(其中φrt为0);p为微分算子;d为常数。系统的状态变量为[φrm,ω,ism,ist]T,控制变量为[usm,ust]T。令


假设,f1(x1)、b1(x1)、f2(x1,x2)、b2未知,考虑到主轴实际运行时的内外部不确定因素的影响,令

式中:f10(x1)、b10(x1)、b20、f20(x1,x2)均为主轴标称系统参数,Δf1(x1)、Δb1(x1)、Δb2、Δf2(x1,x2)为主轴系统存在的不确定项。
2 高速电主轴控制系统设计及稳定性分析
高速电主轴自适应反演控制设计的目的是,当主轴运行时出现自身参数变化和负载扰动及噪声等环境因素影响时,主轴转速和转子磁链仍能稳定跟踪系统的期望信号,最终保证主轴加工的精度和稳定性。因此,首先引入误差状态向量e1,e2∈R2,于是,有



通过“步骤1”及“步骤2”的推导,可以得到以下结论:通过主轴电机的动态数学模型,在b2,b20正定、有界且都可逆和假设1的前提下,虚拟控制量和控制量分别采用式(5)和式(17)的形式,智能调节RBF神经网络各参数调节率分别采用式(11)~式(13)和式(19)~式(21)的形式,则可以推论,主轴系统误差状态向量e1,e2以及神经网络各参数估计误差均有界且指数收敛至系统原点的一个领域,并且该领域可以通过参数调整达到任意小值。

3 仿真结果分析
为了验证高速主轴电机块控自适应反演控制方案(见图2)的有效性和可行性,利用表1的原始参数,在MATLAB/Simulink中建立如图2的系统仿真模块,仿真系统采用离散采样方式,采样时间设置为1×10-6s。运用固定步长法求解且步长设置为1×10-6s,求解器选用ode3型.相关控制器参数分别取为k1=80,k2= 60,δW1=δ1μ=δ1σ=0.15,δW2=δ2μ=δ2σ=0.01,η1= 0.5,η2=0.025。控制器参数值对系统响应速度和参数收敛速度有较大影响,这里给出的数值是在仿真中经过反复试验和比较后得到的。
仿真中,电主轴的额定转速为15 000r/min,给定磁链为0.1Wb,空载启动至额定转速。从4 s开始施加一个大小为10 N·m的阶跃负载,观察仿真过程,并对其进行分析。

图2 高速电主轴块控自适应反演控制系统原理框图ig.2 Functional block diagram of high-speed motorized spindle’s block and adaptive backstepping control system

表1 170MD15Y20型高速电主轴额定参数表Tab.1 Type 170MD15Y20 high-speed motorized spind le data
利用示波器分别观察在使用块控自适应反演控制器后系统跟踪转速,转矩等的实验结果见图3,仿真时间为5 s仿真结果与同一型号主轴,同等参数条件,矢量控制方案下进行对比分析。
由图3(a)可知,电主轴在空载启动阶段,转速以较大的加速度快速上升,在t=2.2 s时,转速达到给定值,这比同等条件下针对该套主轴的矢量控制方法快了0.6 s,据局部放大的图3(b)可知,电主轴在t=4 s受到10 N·m的阶跃负载时,转速略有下降,0.2 s后恢复到给定转速,并且无稳态静差,转速跟踪实时性好,精度高。可以观察出块控自适应反演控制较之矢量控制而言,具有更小的超调量和更少的震荡次数,并且在受到突加载荷冲击后,转速抖动更小,调整时间也大为减少,转速跟踪精度高,这在实际加工工况中具有更明显的优势。
由图4知,电主轴空载启动完毕后,电磁转矩>0,实际用于客服摩擦转矩,在t=4 s,施加10 N·m的阶跃负载后,电磁转矩迅速变为10 N·m,由于系统存在摩擦、损耗等,实际值>10 N·m,证实了主轴系统在运用自适应反演控制后实现了对转矩的快速跟踪,从而保证输出转速的稳定性,提高了电主轴的加工性能。转矩跳变后产生5.5 N·m的脉动这也比同等条件下的矢量控制方法等大为降低。
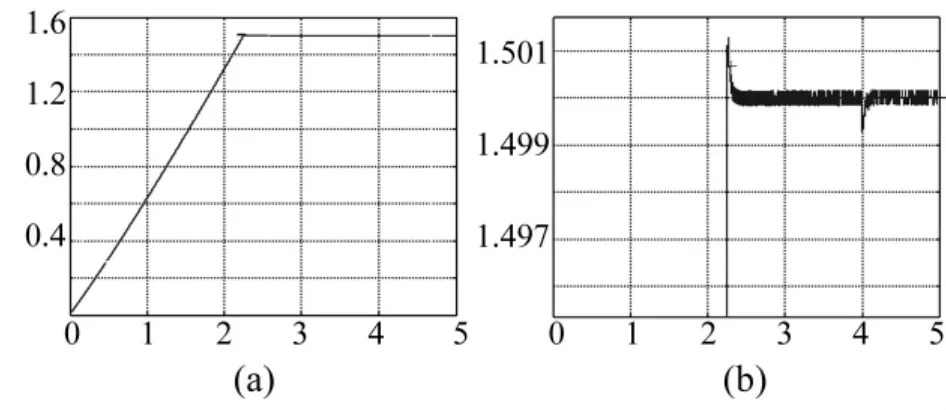
图3 高速电主轴块控自适应反演转速响应Fig.3 Speed response of the high-speed motorized spindle under block and adaptive backstepping control system
由图5(a)可知,转子磁链在启动后经过短暂的超调快速达到并且稳定在给定磁链0.1 wb,在t=4 s受到10 N·m的阶跃负载后,任然能够保持磁链值的恒定不变,由图5(b)局部放大图可知,受到冲击载荷后的磁链偏差仅为0.0015 wb,且在0.1 s后即达到稳定状态,通过与同等条件下的矢量控制方案比较可以看出:在块控自适应反演控制中,对磁链的控制效果更优,且磁链的稳态误差明显小于矢量控制。
由图6可知,电主轴的要实现很高的转速,启动阶段的电流很大,这也符合电主轴的实际运行情况,电流一方面实现励磁,另一方面用于产生转矩电流,使主轴以较大的加速度值加速运行到额定转速。在t=4 s受到10 N·m的阶跃负载后,电流迅速增大,以产生较大的电磁转矩来抵抗负载冲击,使转速保持稳定。由图6可知,电流脉动值相对于矢量控制、直接转矩控制等有了明显的改善。
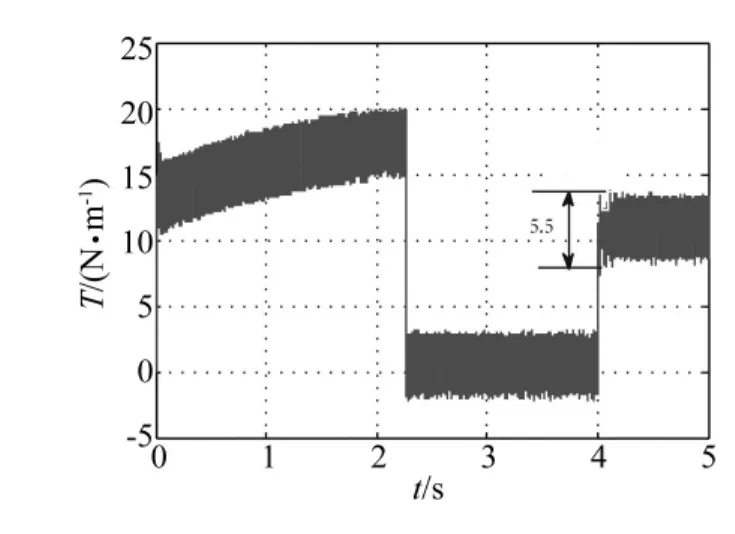
图4 高速电主轴块控自适应反演转矩响应Fig.4 Torque response of the high-speed motorized spindle under block and adaptive backstepping control system
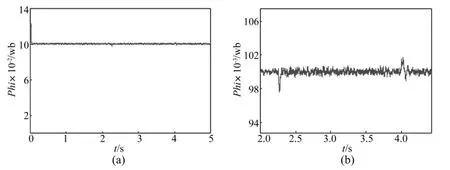
图5 高速电主轴块控自适应反演控制磁链响应Fig.5 Flux response of the high-speed motorized spindle under block and adaptive backstepping control system
高速电主轴要实现每分钟几万甚至十几万的转速,必须配备高频变流装置,当高频交流电流通过电阻时,导致电流集中在转子导体的表面流过,这就使得主轴的转子电阻值发生较快变化,仿真针对高速电主轴这一实际运行特性,在t=4 s时,转子电阻值Rr突变为其标称值的2倍,由图7和图8可知,当电主轴转子电阻值发生变化时,主轴的输出转速和转矩的跳动量分别为0.6 r/min和0.2 N·m由此可见,主轴系统因内部参数突变而引起的转速转矩跟踪误差很小,系统鲁棒性很强,跟踪实时性好,稳定性高,这是因为控制器中的智能调节RBF神经网络通过自身学习调节抵消系统中的不确定性,大大减少了不确定因素的影响,因此能获得较好的控制效果,保证了主轴加工的精度和稳定性。

图6 电主轴块控自适应反演控制定子电流响应Fig.6 Flux response of the high-speed motorized spindle under block and adaptive backstepping control system

图7 电主轴参数Rr发生突变时转速跟踪曲线Fig.7 Speed tracing curve when parameterRr gets changed
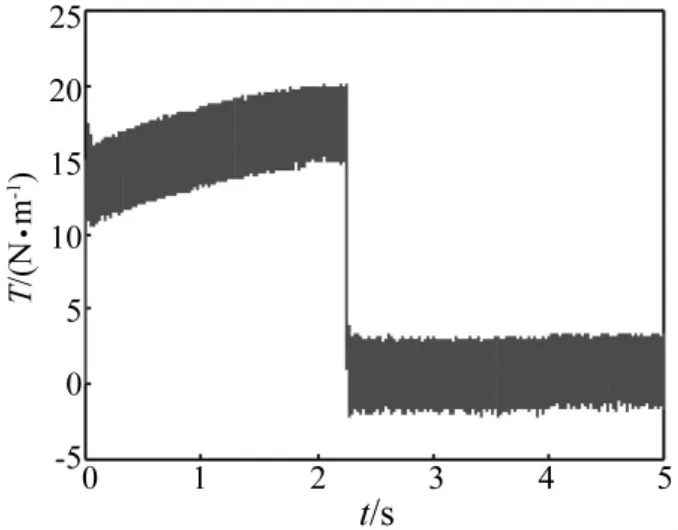
图8 电主轴参数Rr发生突变时转矩跟踪曲线Fig.8 Speed tracing curve when parameter Rrgets changed
4 结论
(1)用研究所设计的鲁棒自适应反演控制器,可以使主轴系统在存在未建模动态和有界扰动的情况下,系统状态全局稳定,而且通过调整控制参数,可以使主轴系统状态以任意精度趋于平衡点。
(2)所设计的控制器由于采用了将鲁棒控制和智能调节RBF神经网络相结合的方法,由神经网络补偿主轴系统的不确定性和扰动,大大抵消了不确定性和扰动造成的负面影响,由鲁棒控制消除静态时干扰的影响,这时所需考虑的干扰作用大大减少了,这就能够显著提高主轴系统动态性能,所以从总体上达到了相互补充的作用。将这种控制方法应用于高速主轴电机,能显著提高系统的动、静态性能。
(3)要提高高速电主轴驱动控制系统的性能,需要从磁链和转速估计及控制策略这三个方面努力。要解决的首要问题是在定、转子电阻和负载转矩这三个参数中的一个或两个变化时,如何准确的估计磁链和转速。控制策略方面要解决的主要问题是定子电流的转矩分量和磁链分量的解耦控制,定、转子电阻和转矩这三个参数中的一个或两个变化时,如何抑制参数变化带来的干扰作用。这就需要用到神经网络和鲁棒控制的理论。如何将这二者很好的结合起来,是后续工作的重点。
[1]Polycarpou M M.Stable adaptive neural control scheme for nonlinear systems[J].IEEE Transactions on Automatic Control,2006,41(3):447-451.
[2]Chiman K,Lewis F L,Dawson DM.Robust neural-network control of rigid-link electrically driven robots[J].IEEE Transactions on Neural Networks,1998.9(4):581-588.
[3]GE SS,Wang C,LEE TH.Adaptive backstepping control of a class of chaotic systems[J].International Journal of Bifurcation and Chaos,2000,10(5):1149-1157.
[4]Zhang T,Ge SS,Hang CC.Adaptive neural network control for strict-feedback nonlinear systems using backstepping design[J].Automatica,2000.36(12):1835-1846.
[5]Karsenti L,Lamnabhi-Lagarrigue F,Bastin G.Adaptive control of nonlinear systems with nonlinear parameterization[J].System and Control Letters,1996,27(6):87-97.
[6]Knohl T,Unbehauen H.ANNNAC extension of adaptive backstepping algorithm with artificial neural networks[J].IEEE Proceedings Control Theory and Applications,2000,174 (2):177-183.
[7]Deng Hua,LiHan-xiong,Wu Yi-hu.Feedback-linearizationbased neural adaptive control for unknown nonaffine nonlinear discrete-time systems[J].IEEE Transactions on Neural Networks,2008.19(9):1615-1625.
[8]Ge S S,Yang Chen-guang,Lee Tong-heng.Adaptive predictive control using neural network for a class of purefeedback systems in discrete time[J].IEEE Transactions on Neural Networks,2008.19(9):1599-1614.
[9]Du Hong-bin,Shao Hui-he,Yao Ping-jing.Adaptive neural network for a class of low-triangular-structured nonlinear systems[J].IEEE Transactions on Neural Networks,2006,17 (2):509-514.
[10]单文桃.高速电主轴驱动性能及智能控制研究[D].重庆:重庆大学,2014.
[11]单文桃,陈小安,合烨,等.基于免疫遗传算法的模糊径向基函数神经网络在高速电主轴中的应用[J].机械工程学报,2013,49(23):167-173.
SHANWen-tao,CHEN Xiao-an,HE Ye,et al.Application of immune genetic algorithm based fuzzy RBF neural network in high-speed motorized spindles[J].Journal of Mechanical Engineering,2013,49(23):167-173.
[12]孟杰.高速电主轴动力学分析与实验研究[D].重庆:重庆大学,2008.
[13]Polycarpou M M,Loannou P A.A robust adaptive nonlinear control design[J].Automatica,1996,32(3):423-427.
[14]胡云安,晋玉强,李海燕.非线性系统鲁棒自适应反演控制[M].北京:电子工业出版社,2010.
Block adaptive backstepping control for a high-speed motorized spindle
SHANWen-tao1,CHEN Xiao-an2
(1.School of Mechanical Engineering,Jiangsu College of Technology,Changzhou 213001,China; 2.Chongqing University,Chongqing 400044,China))
Aiming at a high-speed motorized spindle(HSMS)'s drive control system with features of uncertainty,non-linearity and strong coupling,a block adaptive backstepping control for itwas proposed here based on a global RBF neural network.Backstepping control laws and parameter updating lawswere derived using Lyapunov theory to guarantee the stability of the whole spindle system.With the proposed block adaptive backstepping controller,the rotor speed and flux reference signals tracking of the high-speed motorized spindle revealed the advantages of nice transient control performance and robustness to the load torque disturbance and parametric uncertainty.Simulation results validated the effectiveness and rationality of the proposed control scheme.
motorized spindle;radial basic function(RBF)neural network;backstepping control;nonlinearity
TH133
A
10.13465/j.cnki.jvs.2015.23.018
国家自然科学基金青年基金(51405209)
2015-04-29修改稿收到日期:2015-05-25
单文桃男,博士,讲师,1987年生
陈小安男,博士,教授,1956年生
