人手食指抓取过程仿真与分析*
2015-05-15马永达袁锐波刘泓滨丘世因
马永达,袁锐波,刘泓滨,丘世因
(昆明理工大学 机电工程学院,云南 昆明650500)
人手己成为机器人学者进行机器人设计,实现其灵活控制的思考源泉。为了使机器人的末端操作器对不同形状和不同性质的物体具有抓、握、夹、拿等功能,越来越多的学者对仿人形灵巧手投入了极大的关注,其主要依据为:人手经过自然界进化己经成为优化结构,是灵巧手设计的重要参照;生活中的各种工具均是按照人手使用习惯设计的,仿人形灵巧手更适合操作这些工具;仿人形灵巧手与人手具有操作一致性的特点,可以利用人的操作经验实现控制。另外,在某些特殊领域,如医疗、仿人机器人和娱乐等,仿人形灵巧手具有亲切感,更容易被用户接受。仿人灵巧手的主要功能是抓持和操作物体,抓持是操作的基础,这就需要对人手的抓持过程进行研究。
就灵巧手的抓持规划而言,实现主从操作的关键问题之一是如何将人手的抓持转换为灵巧手的抓持,这就需要分析人手的运动学结构,建立人手运动学模型,从而使人手与仿人灵巧手之间的运动映射可以在关节空间和直角空间进行,运动映射空间的选择应取决于抓持类型。对于指端抓持,物体与手指仅在指端接触,主要用于操作物体或对物体位姿进行微小精确调整,因此确定指端相对于物体的位置是一个重要因素,而关节位置可看成指端位置的函数,由指端位置决定。所以,对于指端抓持而言,测量指端位置并进行直角空间映射是合理的选择。
本文从人手解剖学结构和人手运动学模型着手,通过识别人手食指指端在抓持过程中的位置轨迹,找出食指在抓取物体过程中各个关节的运动规律,利用仿人灵巧手与人手相似的特点,借鉴人手的抓持经验,建立从人手到仿人灵巧手的映射关系,以求运用到仿人灵巧手的运动与控制,并在机器人或其他领域得到运用[1-7]。
1 食指关节的运动
1.1 食指结构及其关节运动范围
由人手解剖学可知,食指、中指、环指和小指结构基本相同,食指由3个指节和3个关节组成,3个指节分别为近指节、中指节和远指节;3个关节分别为掌指关节、中指节关节和远指节关节。一般认为除拇指外,其他4个手指的结构相同,各具有4个自由度,分别是掌指关节的屈曲和侧摆自由度,中指节关节和远指节关节的屈曲自由度。
根据手外科解剖学,下述分析食指各关节的屈伸范围。掌指关节的主要运动是外展、内收、屈、伸和环转,还可做有限度的被动旋转活动,所要研究的食指掌指关节屈伸为0°~90°;近侧指间关节屈曲0°~100°;远侧指间关节屈曲0°~90°。
1.2 食指运动学分析及建模
把单个手指的掌指关节以上部分作为研究对象,并对手指的指骨和关节用连杆和铰链进行简化,建立手指抓取运动模型。取指尖在抓持过程中到达的轨迹位置为与掌指关节的运动中心平齐的位置,设掌指、近侧指及远侧指指骨到关节中心点的长度分别为l1、l2和l3,根据指尖的运动轨迹,研究掌指关节、近侧指关节和远侧指关节的转角θ1、θ2和θ3的变化规律。
按照食指机构运动学建立的坐标系如图1所示。
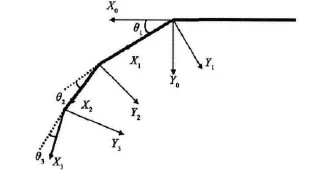
图1 食指运动学坐标系
根据图1所示坐标系可以得到手指运动时的指尖轨迹方程如下:

2 试验分析与逆运动学计算
2.1 试验测量手指抓取动作的数据
在食指靠近指尖位置做1个标志点,模拟用手指抓取某一物体,用数码相机的摄像功能对手指的整个抓取动作过程进行摄像。在光线比较好的场地对手指动作进行摄像,为防止图像抖动,把摄像机安装在三角架上,并通过水准尺进行调平,按24幅/s进行拍摄。通过摄像机自带软件取出拍摄的图像并转存到影像格式avi文件,随后用视频软件对其进行动作位置等时间分隔剪辑,保存为静态图像格式jpg文件,并通过AutoCAD软件对等时间间隔的每幅图像上的标志点进行处理和合成。手指抓取动作影像经剪辑处理后的图片合成各等时间位置图如图2所示。根据所测的手指机构的各连杆长度绘出的食指运动过程的机构位置简图如图3所示。

图2 手指抓取动作影像图

图3 食指运动机构位置简图
2.2 根据实测轨迹进行食指逆运动学计算
根据试验测量出的一系列轨迹点列出逆运动学方程见式2,用MATLAB软件的优化函数Fmincon进行计算,分别计算出θ1、θ2和θ3值并拟合出θ1的曲线,如图4所示,其表达式见式3;θ2曲线如图5所示,其表达式见式4;θ3曲线如图6所示,其表达式见式5。

图4 θ1曲线拟合图
式2~式5如下。

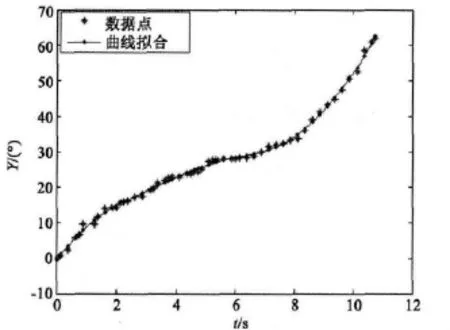
图5 θ2曲线拟合图


图6 θ3曲线拟合图

3 轨迹仿真与分析
利用SolidWorks软件建立食指的三维模型,关节处采用转动副连接,利用配合关系分别限定掌指关节、近侧指关节和远侧指关节的角度运动范围,固定掌骨部分。利用Solidworks软件的Motion插件对建立的食指连杆机构虚拟样机进行运动仿真,使仿真坐标系与试验测量轨迹坐标系位置相同,分别在掌指关节、近侧指关节和远侧指关节添加旋转马达,选择旋转马达的运动类型表达式,依次在掌指关节、近侧指关节和远侧指关节处输入θ1、θ2、θ3的拟合函数,如图7所示。选择“结果与图解”功能中类别选项里的“位移/速度/加速度”选项,选定指尖点(见图8)来跟踪食指连杆机构指尖的路径,从而获得仿真轨迹,如图9所示。

图7 SolidWorks Motion旋转马达表达式编辑

图8 SolidWorks Motion结果与图解编辑
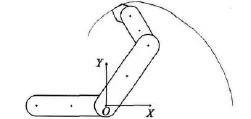
图9 SolidWorks指尖仿真轨迹
利用MATLAB软件将仿真轨迹与试验测量轨迹进行分析,如图10所示,可见仿真轨迹基本符合试验轨迹的规律,平均误差为0.125mm。

图10 仿真轨迹与试验轨迹比较
4 结语
通过试验与仿真结果可知,手指的运动是由手指各关节的转动带动指骨的运动来完成的,手指抓取物体时,各关节的运动可以由一定的运动规律来描述。研究表明式3~式5表示的运动规律可用来描述手指关节的运动,因此可以用一定的运动规律来控制仿人灵巧手的抓持运动过程。借鉴人手的抓持经验,建立从人手到仿人灵巧手的映射关系,对仿人灵巧手的进一步研究以及手功能康复的应用等其他领域具有积极的指导意义。
[1]Jau D.Telemanipulation with four fingered hand system[J].IEEE Int Conf on Rohotics and Automation,1996,3:338-343.
[2]DS SolidWorks公司.SolidWorks Motion运动仿真教程[M].北京:机械工业出版社,2012.
[3]高秀来,于恩华.人体解剖学[M].北京:北京大学医学出版社,2003.
[4]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[5]刘博.人手食指运动学建模[J].机器人,2003,29(3):214-218.
[6]李继婷.人手抓持识别与灵巧手的抓持规划[J].机器人,2002,24(6):530-534.
[7]张水德,刘廷荣.机器人多指灵巧手的结构参数优化分析[J].机器人,1999,21(3):234 -240.
