基于自适应模糊控制的矿井提升机系统设计
2015-05-14廉文利
廉文利
(唐山学院 智能与信息工程学院,河北 唐山063020)
0 引言
矿井提升机是煤炭深井生产过程中的重要运输设备,用来提升矿井下的矸石与煤炭等物料和人员,其工作性能的稳定性直接影响煤矿的生产效率。矿井提升机正、反两方向需频繁地作加减速运动,是时变非线性的复杂控制系统[1-2]。虽然传统的PID控制器有结构简单、调整参数方便、稳定性好等优点,但是对于数学模型不能精确确定的矿井提升机,常规PID控制规律无法满足控制需求。而自适应控制技术,可以根据被测参数、环境参数等变化对系统自动校正,使控制系统随时处于最优的状态,对缺乏精确数学模型的被控制对象能进行有效控制,从而提高控制系统动、静态性能指标。为此,笔者基于自适应模糊控制对矿井提升机系统进行设计。
1 矿井提升机控制系统的构成
矿井提升机运行过程是由启动、加速、匀速、减速、停车等组成的变速运动,罐笼(或箕斗)所装载物体的重量和所处空间位置在运行过程中时常变化,被控制对象的不确定性与多变性是控制的难点[3]。对矿井提升机各种难以精确掌握的控制因素,常规PID控制规律难以实现。而模糊逻辑控制技术引入符合人行为的控制规则,往往能解决常规PID等传统控制方法控制效果差的问题。自适应模糊技术是模糊逻辑理论与自适应控制技术相结合的产物,在实际运行中能根据偏差与偏差变化率的不同随时调整控制规则,使被控制系统动、静态性能指标始终处于最优的状态。矿井提升机的自适应模糊控制系统结构如图1所示。
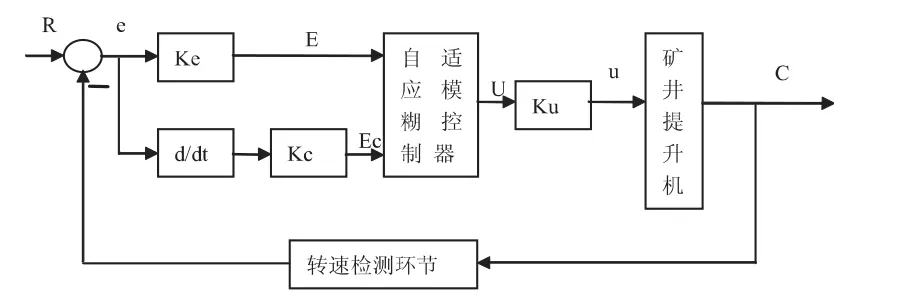
图1 矿井提升机的自适应模糊控制系统结构
2 自适应模糊控制器的设计
自适应模糊控制在模糊控制技术基础上融入自学习、自组织与自适应技术,根据控制系统自身控制过程检测的信息和外部环境参数,进一步修改控制器参数或完善控制规则,使得自适应模糊控制器能够根据参数的变化对控制规则进行不同程度的调整[4]。
2.1 模糊化
模糊化是将精确的模糊控制器输入变量转换为模糊化变量,并确定各自的论域范围与模糊变量子集。对模糊控制器的输入变量依据图2所示的三角形隶属函数进行模糊化处理,并用相应的模糊集合表示。
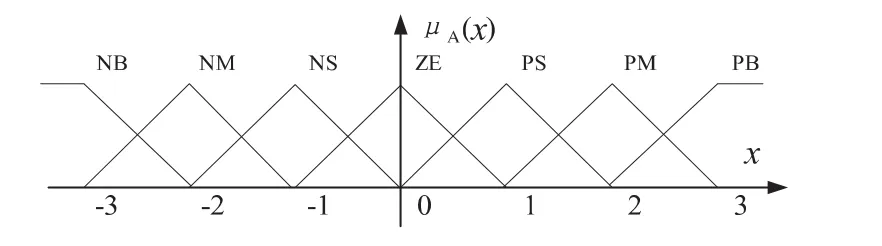
图2 模糊化函数
将模糊控制器的模糊语言变量依据三角形隶属函数分别定义相应的整数,即:
PB=3,PM=2,PS=1,ZE=0,NS= -1,NM=-2,NB=-3
模糊控制器输入变量的模糊语言变量为:
E={NB,NM,NS,ZS,PM,PM,PB},
EC={NB,NM,NS,ZS,PM,PM,PB}。
2.2 自适应模糊控制器算法的设计
模糊控制规则是操作者在长期控制实践中的经验累积,这些经验一般用定性的、不精确的模糊语言规则形式表述,通过模糊推理推出模糊化的控制变量。自适应模糊控制器采用带修正因子的解析式确定模糊控制规则的方法,将控制规则与语言变量间确定为一一对应的关系,这样按常用的模糊推理算法形成的控制规则概括为如下的一个解析式:

式中λ为修正因子。
采用带修正因子的解析式表述控制规则具有简单方便、降低模糊规则的主观性和盲目性、计算机容易实现等特点[5]。通过调整修正因子可以修正控制规则,修正因子的变化体现于对误差和误差变化率加权值的调整,反映了操作者进行控制活动时的思维特性,避免了通常控制规则定义中的跳变或空档等现象。不同的误差等级对应不同的修正因子,以实现对模糊控制规则的在线自调整,修正因子与误差的关系如下:
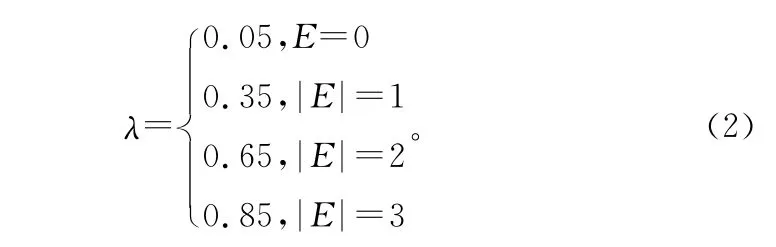
根据式(1),(2)确定的模糊控制规则如表1所示。
2.3 模糊判决
对于模糊控制系统,最终应输出确定的控制量,驱动控制系统的执行机构。解模糊化就是执行被模糊控制器激活的所有模糊规则输出的组合,再转换为精确的可执行量。它是模糊空间到清晰空间的一种映射,这种映射称为判决,加权平均法是常用的解模糊化判决方法,如下式:
式中u0为模糊集合u1通过加权平均法求得的判决结果。

表1 模糊控制规则状态表
3 控制系统仿真分析
应用Matlab仿真软件中simulink工具箱对矿井提升机自适应模糊控制器建立了仿真模型,如图3所示。通过仿真得到自适应模糊控制矿井提升机的速度,利用plot(v,t)绘制矿井提升机速度与时间的关系曲线,如图4所示。由图4可以看出,速度实际运行曲线与给定速度运行曲线基本重合。
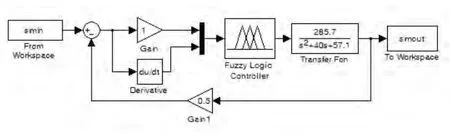
图3 矿井提升机自适应模糊控制系统仿真模型
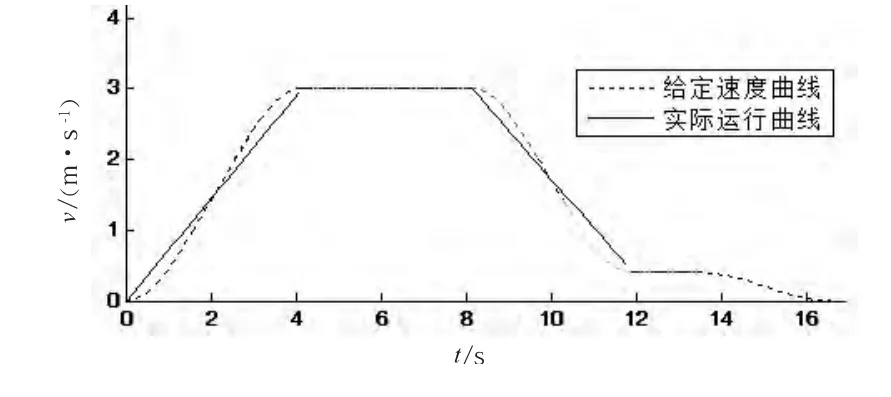
图4 自适应模糊控制矿井提升机速度仿真曲线
4 结论
自适应模糊控制系统根据带修正因子的解析式确定模糊控制规则,使主观性与盲目性大大降低。通过应用仿真软件Matlab,可选择合适的隶属度函数,使模糊系统的结构设计更加合理、简单。实践证明,自适应控制方案具有准确性能好、响应速度快、性能可靠等特点,实现了矿井提升机调速过程的安全性与稳定性。
[1] 郑勇.基于Lab VIEW的矿井提升机故障诊断系统设计[J].煤炭技术,2014,33(11):234-235.
[2] 刘晓冬,张海,庞福.基于BP神经网络的矿井提升机自适应PID控制器研究[J].煤矿机械,2014,35(7):171-173.
[3] 彭秋红,成兰.矿井提升机的模糊PID控制器研究[J].机电信息,2014(24):148-149.
[4] 李岚.自适应模糊控制综述[J].山东工业技术,2015(5):209-210.
[5] 张景元.基于神经网络的自适应模糊控制系统[J].计算机工程与设计,2014,35(10):3613-3616.
