基于低成本传感器配置的信息融合方法研究
2015-05-14李涛沈江天津大学管理与经济学部天津300072
李涛,沈江(天津大学管理与经济学部,天津300072)
基于低成本传感器配置的信息融合方法研究
李涛,沈江
(天津大学管理与经济学部,天津300072)
摘要:文章重点研究了低成本传感器配置及信息融合的方法,针对实际工程应用,设计了低成本传感器配置方案及信息融合的方法,通过建立系统的状态空间模型,应用卡尔曼滤波,并采用4元数表示法进行扩展卡尔曼滤波的姿态融,借助于算法研究了实时扩展卡尔曼滤波技术的设计与实现,最后采用实例模型的数据对方案进行仿真验证,并对验证结果进行分析。
关键词:低成本传感器配置;信息融合;Kalman滤波
信息融合在20世纪70年代被提出,由于传感系统中信息表现形式、数量、关系等方面的复杂性,以及信息的有效性与及时性,仅依靠人脑的信息处理能力已不能满足需要。因此,多传感器数据融合便蓬勃发展起来,在现代多种应用平台和领域得到广泛应用。
信息融合作为传感信息配置的辅助技术,能够使信息得到充分整合与利用,使信息相互补充、验证,降低信息的不确定性,为控制系统提供更精确、可靠、全面的数据信息。Waltz和Linas[1]全面论述了多传感器信息融合的内容、框架与应用,Shalom和Fortman[2]阐述了目标跟踪领域应用多传感器数据融合方法的新思想。20世纪80年代以来,我国学者将多传感器信息融合技术逐渐运用到国防、机器人、工业过程监控系统等领域[3]。
在工程技术问题中,为了解决量测值中存在的随机误差问题,需要采用最优估计技术,其中Kalman滤波是一种比较合适的最优估计技术,具有线性最小方差估计的特点[4]。本文的研究对于拓展多传感器信息融合技术应用到智能遥感、生产制造和商业经济等领域具有重要的实践意义。
一、空间模型
建立系统的状态空间模型是应用卡尔曼滤波的必要步骤[5]。在实际应用过程中,想要得到完全真实的系统方程是很难的,并且也不会得到线性方程。在应用方程中应为线性,而且依据工程实际条件和精度的需要,选择空间维度,即

式中:X(t)为状态量;A(t)为状态运动方程;B(t)为系统驱动矩阵;U(t)为系统输入;Z(t)为系统的观测量; H(t)为观测矩阵。
对系统方程作离散处理,求得微分方程为

该系统为定常系统时,即A(t)=A,并记离散周期T=tk+1-tk,则

记φk+1,k=φ(tk+1,tk),φk+1,k称为一步状态转移矩阵。根据矩阵理论得到

当滤波周期很小时,一般可将φk+1,k近似地写为

当该系统为时变系统时,即A(t)是随着时间而不同,则应满足滤波的精度,必须选择小的滤波周期T,让在经过离散处理的周转期内A(t)近似为常值,然后按公式(5)进行计算。
当Xk=X(tk),Uk=U(tk),将其代入式(2),则近似地可以得到

当Γk=TB,则式(2)转化为

对观测方程的离散化一般采用零阶保持器进行,记Zk=Z(tk),Hk=H(tk),则Zk=HkXk。因此,连续系统的离散化方程为


二、算法实现及仿真结果分析
(一)算法原理
本文将采用四元数表示法进行扩展卡尔曼滤波的姿态融[6]。运用四元数法有很多优势,如简单、可操作性强等,同时还可以摆脱奇异矩阵的问题。它的相关矢量为
观测量:y=[axmaymazmBxmBymBzmpmqmrm]
状态量:x=[q0q1q2q3p q r λpλqλr]
在动力学方程中,运动学部分会有所改变,滤波器的动力学部分保持不变,得到动力学部分如下
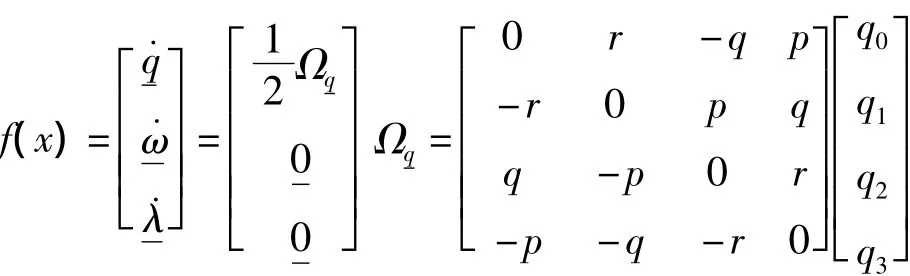
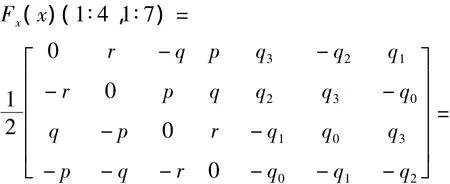
由该方程得到雅克比矩阵就相对简单,则
在观测方程中使用四元素表示,与欧拉角描述相似,首先需要从状态预测xk|k+1,得到方向余弦矩阵Tnb,即

其观测方程的形式也与欧拉角描述相似,如
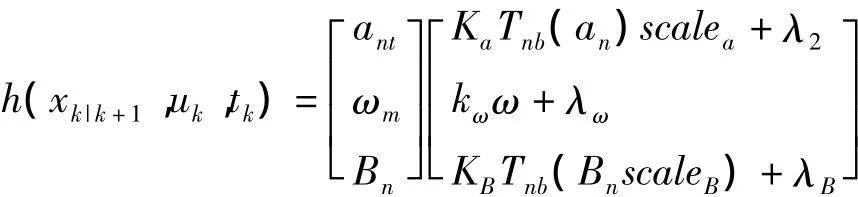
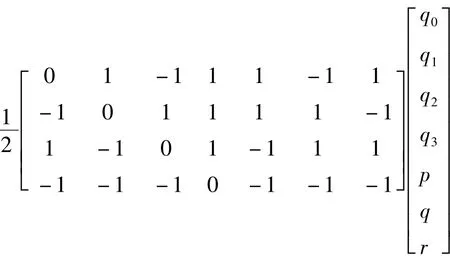
通过将观测方程写成标量形式对状态量求偏微分,然后重新写成矩阵矢量的形式,即

因此,可以说该运算方程完全是线性的,并且摆脱了奇异矩阵和角度计算的问题。
(二)算法实现
1.传感器阵列设计及实现
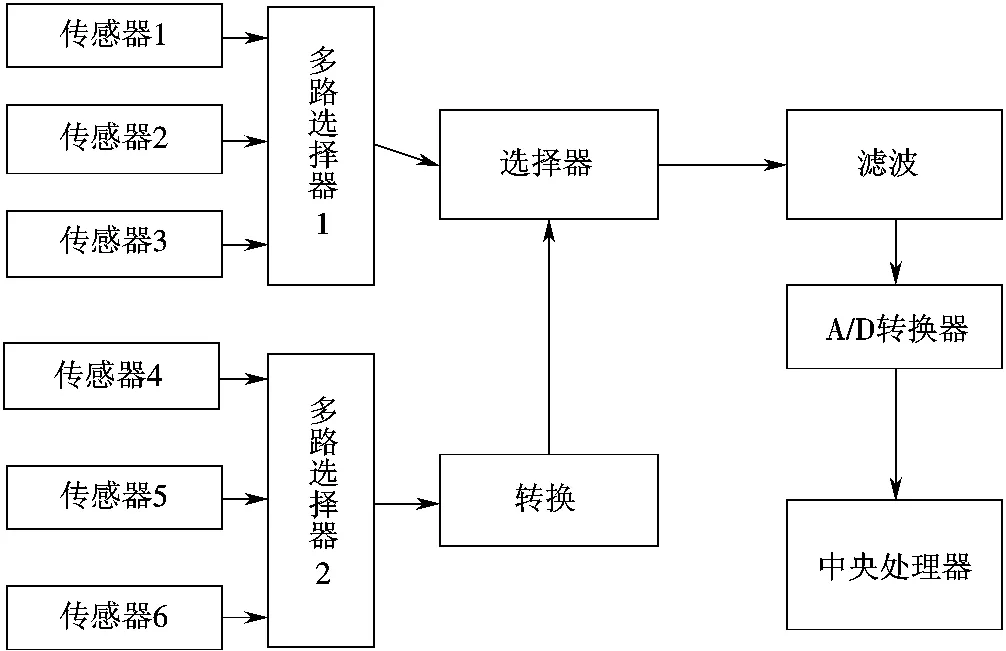
本文采用单路A/D采集器来实现多传感器多路数据采集系统的基本设计框图(见图1[7])。框图左侧为各类传感器的输入信号,按信号分类,多路模拟选择器可以分为两种,多路选择器1为单极性信号采集,多路选择器2为双极性信号采集。经过A/D转换的多路传感器数据,通过中央处理器将其融入系统的具体控制规律和解算方法中,以实现信息融合[8]。
2.矩阵运算的处理
我们使用C语言代码来实现融合算法,在Matlab软件平台之下,数据信息可以存为可直接读用的矩阵形式[9],其处理结果通过Matlab得到仿真验证。
同纬度及不同纬度的矩阵运算被应用在滤波计算当中,在C代码中不能直接调用,运算时矩阵成一个结构包括行、列,从而定义相关运算函数。
3.传感器信号的处理
对传感器信号的采样会出现速率不同以及不同延迟的难题[10],以下是处理方法。
(1)对速率不同的问题,在采用矫正和预测过程中,仅将测量值看做观测值。由于传感器自身质量比较低,因此要针对性选择不严格的方法,而该方法更为恰当。
(2)针对不同延迟的问题,应采取直接忽略的方法。因为方案中采用的是Matlab模拟数据,而非实际数据,因此应该忽略。
卡尔曼滤波算法程序的流程(见图2),当进行每一次循环,程序都执行一次Kalman滤波计算,利用传感器的观测信息进行估计,运算后保存有效结果。
(三)卡尔曼滤波器功能验证——Matlab仿真
滤波器功能验证过程中,数据仿真是必不可少的环节。因为滤波器通过仿真的功能验证的成本很低[11]。除此之外,它还可以在工作前期阶段发现问题,从而使后续工作中出现重复工作的情况大幅度减少。综上所述,通过仿真软件对滤波器进行全方位的验证与分析,能够不断优化滤波器的效能,同时缩短整体时间。
某时刻滤波器姿态的估计,是通过采集该时刻磁强计测量值Bmeas、小卫星对应位置在坐标系中磁场强度的表示→B→orb,以及迁移时刻总力矩ΣT。
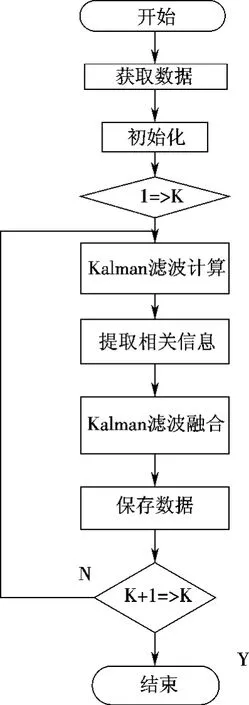
图2 卡尔曼滤波流程图
滤波器仿真简化方式有:一是假定为圆轨道;二是要运用偶极子模型。由轨道模型和地磁场模型及坐标转换矩阵可得到Borb,再根据卫星的姿态理论值模拟出磁强计测量值的时间序列Bmeas,其上已叠加了高斯白噪声来模拟磁力矩和星上剩磁干扰的影响。将3个参数Borb、Bmeas和Ts传给卡尔曼滤波器进行状态估计。经过分析,作用于星体上的平扰力矩Td比Tg、Ts小一个数量级以上。
在滤波器的仿真过程中,其影响可予以忽略。通过仿真结果发现,除波形尖锐处有较大误差外,其余部分均基本吻合,收敛时间约为3到5分钟。此滤波算法主要受两方面因素的制约,其一为滤波器的初始估值,其二为待估实际值的取值,也即估值范围。通过观察分析,此滤波器总体满足性能要求。
三、结语
本文介绍了扩展卡尔曼滤波。然后通过建立系统的状态空间模型研究应用卡尔曼滤波,并采用四元数表示法进行扩展卡尔曼滤波的姿态融,借助于算法研究了实时扩展卡尔曼滤波技术的设计与实现。并采用实例模型的数据对方案进行仿真验证,并对验证结果进行了分析。
同时,论述了一般传感器配置与信息融合技术结合的必要性和重要性,并考虑到传感器阵列管理、多传感器融合方法、决策原则以及对传感器的自适应配置与实时反馈调节,这有利于排除预警决策规则中的虚警、误警等问题,从而尽可能降低虚警、误警导致的不必要人力、物力损失。
参考文献:
[1]王顺奎.国外信息融合技术概述[J].红外与激光技术,1995(1):1-4.
[2]Bar S Y,Formann T E.Tracking and Data Association [M].New York:Academic Press Inc,2003.
[3]杨万海.多传感器数据融合与应用[M].西安:西安电子科技大学出版社,2004.
[4]Klein L.A sensor and data fusion concepts and application[J].SPIE Optical Engineering,1993(14):48-54.
[5]梁佐江.基于Kalman滤波方法的多传感器信息融合滤波器[D].哈尔滨:黑龙江大学电子工程学院,2005.
[6]Lovera M,Astolfi A.Global magnetic attitude control of spacecraft in the presence of gravity gradient[J].IEEE Transactions on Aerospacce,2006(7):69-85.
[7]余济祥.卡尔曼滤波及其在惯性导航中的应用[D].西安:西北工业大学航天学院,1984.
[8]Torres G E.Aerodynamics of Low Aspect Ration Wings at Low Reynolds Numbers with Applications to Micro Air Vehicle Design[D].Notre Dame:The Graduate School of the U-niversity of Notre Dame,2002.
[9]高新建,屈丹,李弼程.说话人确认中分数归一化的一种新方法[J].计算机应用,2007(10):2602-2604.
[10]俞立平,潘云涛,武夷山.学术期刊综合评价数据标准化方法研究[J].图书情报工作,2009(12):136-137.
[11]Scherzinger B M.Low cost inertial integrated positioning orientation system for marine application[J].IEEE AES Magazine,1997(9):97-112.
Information Fusion Method Based on Low-cost Sensor Configuration
Li Tao,Shen Jiang
(College of Management and Economics,Tianjin University,Tianjin 300072,China)
Abstract:This paper focuses on low-cost sensor configuration and information fusion method.For practical engineering application,this paper designs a low-cost sensor configuration scheme and information fusion method.Through the establishment of the system state space model for Kalman filter,this paper uses quaternion notation to extend Kalman filter and implements real-time extended Kalman filter technology.Finally,this paper applies example of model to the simulation and verification of the configuration scheme,and analyzes the verified results.
Keywords:low-cost sensor configuration;information fusion;Kalman filter
通讯作者:沈江,tjulitao2010@163.com.
作者简介:李涛(1979—),女,博士研究生.
基金项目:国家自然科学基金资助项目(71171143);天津市科技支撑计划重点基金资助项目(13ZCZDSF01900).
收稿日期:2014-05-20.
中图分类号:F28
文献标志码:A
文章编号:1008-4339(2015)03-285-04