信息融合方法在水力发电厂状态检修中的应用
2017-02-28王晓东
王晓东
摘 要:对于一个发电厂怎样能够确定机组检修时间,以改进以往点检定修的不足,及时转入检修状态显得至关重要。针对此类情况,对于确定何时进入检修状态,需要及时而准确的时间界定,将多元信息融合方法在确定进入检修状态的评估系统中充分利用。对同类传感器的一次数据融合处理后,再对异类传感器进行二次融合,从而评判出发电机组系统的状态等级,对其实时做出进入检修状态的判断,在实际应用中达到预期的效果。
关键词:信息融合 神经网络 模糊控制
中图分类号:TV738 文献标识码:A 文章编号:1672-3791(2016)10(a)-0021-03
当前,大多数水电厂使用的都是非线性传感器输出,加之环境的温度、湿度、电源波动等現场因素的影响,使得传感器的输出信号波动比较大,造成监控困难,不能及时反映被测到的物理量,造成测量结果准确度低、稳定性差,使得机组出现异常停机,转入检修状态次数非常频繁。该文的研究针对这一问题提供有效的理论依据,并加以解决。
随着此行业技术不断提高,各企业生产规模也在不断扩大,生产过程控制系统的技术要求也变得越来越高,生产过程控制系统也变得越来越复杂,由于整个系统的非线性增强、时滞增大,而且不是系统中的每个环节都需要建立精确的数学模型,使得模糊逻辑控制在生产过程中的应用成为可能,它主要是把对被控系统的熟练的操作经验转换成模糊规则。在未使用信息融合的方法之前,对于系统的转检修状态,完全由现场工作人员的经验而定。很多情况出现检修不到位或者过修的现象。相应的计算机控制仅提供参考数据和状态信息,而并不作出判断,其他的全部依靠现场工程人员的经验。该文通过分析水电机组检修的实施办法,提出应用信息融合方法准确判断机组转入检修状态.。主要通过模糊控制系统和神经网络的学习使系统能够在线实时数据处理,及时准确地做出判断,并把以工程技术和现场工作人员的经验作为专家库的信息储存于信息中心,通过一系列的处理过程做出决策结论。
1 电厂的信息系统结构
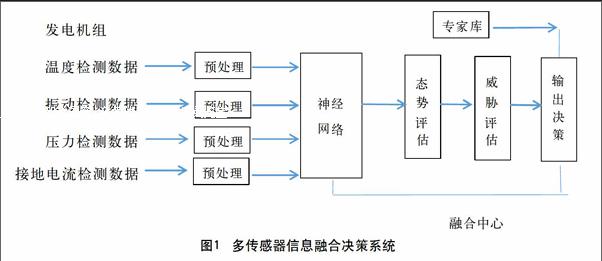
发电机组控制系统、厂用电系统、闸门控制系统、水系统、油系统、消防系统、接地系统、大坝监测系统、水纹监测系统、GPS系统[1]及保护系统采用集散控制模式对信息进行采集与控制。传感器系统通过对现场数据采集,模拟量传4~20 mA电流信号,经过对同类传感器一次融合的结果,再对异类传感器数据送入神经网络融合中心进行二次融合,得到二次融合后的结果,做出实时信息进入融合中心,通过态势评估原理[2]与威胁评估的原理[3]做出决策(图1)。其中预处理包括整形、滤波、去噪、归一化处理等。
2 方法
发电机4种传感器提供的信息,通过的输入层、隐合层及输出层来处理完成后,相邻层间神经元的连接权及隐含层中神经元的阈值,文中最后检测到发电机状态是4个直接检测的非线性参数。
R=f (u0,u1,u2,u3)(u2~u3为神经网络输入,分别对应温度数据、振动数据、压力数据、接地电流数据)。已经证明:单隐含层的BP网络能够通匹任意的非线性函数,故采用单隐含层的BP神经网络来融合脉冲传感器的信息。
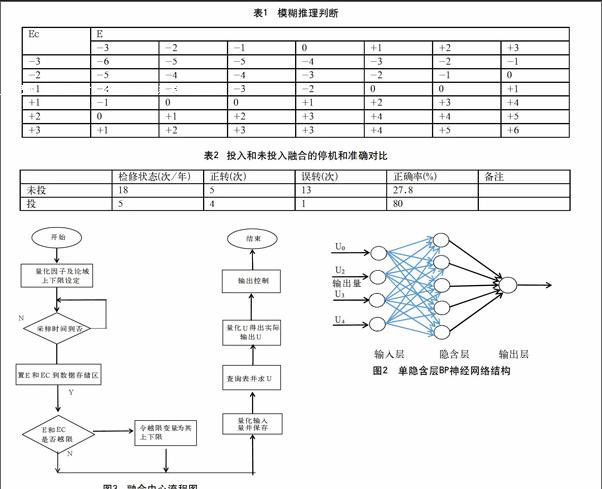
图2为单隐含层BP神经网络结构,4个传感器的信号经过预处理后作为神经网络的输入,隐含层节点数为10个,输出为发电机组的运行状态。X2.bi(i-1,2,......,10)分别为隐含层中第i个神经元的输出及阈值;Wijk为k-1层中第j个神经元对第k层中第i个神经元的联结权值。取隐含层节点的激励函数为S型函数,即:g(z)=1/(i+e-z),则隐层的输出为:Xi=g(),去输出节点的激励函数为线性函数,则整个网络的输出为:==(u0,u1,u2,u3),权和阈值,通过递推预报误差(RBE)训练算法加以确定[3]。
3 结果
其控制过程、精确的输入经模糊化后对照规则表进行模糊推理,得出输出量的模糊数据,经解模糊过程到精确的输出量,该系统模糊控制通过融合中心的状态评估及专家库的共同结合完成二维模糊控制器。输入为误差量和误差变化量,输出点与专家库和状态评估系统提出此时的状态偏差量E和偏差变化Ec作为输入量,调节出u作为输出量,是一个二维模糊控制器,先将论域[4]内连续量离散化为若干档,选择描述偏差的精确连续量为e,描述偏差变化的精确连续量为ec,输出的精确量为U。
其模糊变量分别为E、Ec、U,每个模糊复量可分为若干个模糊状态,如负大(N B)负中(N M),负小(N S),零(Z O),正小(P S),正中(P M),正大(P B)等,隶属度函数取为三角形分布,量化值经模糊语言变量隶属度函数[5]得到模糊量化等级E={-3 -2 -1 0 +1 +2 +3} ,Ec={-3 -2 -1 0 +1 +2 +3},为提高控制精度,控制变量量化等级多一些:u={-6 -5 -4 -3 -2 -1 0 +1 +2 +3 +4 +5 +6},模糊化的过程主要根据实际控制需要以及传感器特性、其范围选择主要根据人的知识和经验通过实验调整得到。为减少调整时间,用Matlab模糊逻辑工具编写的模糊控制器生成程序,并计算控制响应表。结合现场实际情况和人的经验对控制表进行微调,基于神经的模糊推理判断如表1。
表1存在于融合中心的状态评估系统中,当发电机进入正常运行状态后,模糊控制开始工作,状态控制箱上接收到实际运行的状态量后,经解模糊处理得到u。通过与相应的设定门限值进行比较触发相应程序,提供决策,判断机组是否转入检修状态。
4 在融合中心的实现
该方案采用Sum作为融合中心计算机。融合中心流程如图3。
5 模拟调试
在现场投运过程中,通过改变相应的输入参数变化系统能够很好地触发机组转检修状态,特别在初期投运时,现场人员都不熟悉设备的情况下避免了大的经济损失。投入和未投入融合的停机和准确对比如表2。
6 结语
发电系统是一个非线性时变系统,该系统采用工业以太网进行通信,采用阿尔斯通P320系统进行监控,很好地实现现场的各个数据的实时交换,满足现场的运行要求达到相应的精度。
实际运行结果表明,该系统的控制方法完全能满足现场要求,稳定性和响应时间等指标达到了预期。
参考文献
[1] (美)Elliot D.Kaplan.GPS原理与应用[M].北京:电子工业出版社,2007.
[2] 杨万海.多传感器数据融合及其应用[M].西安电子科技大学出版社,2004.
[3] 万百五,韩崇朝,蔡远利.控制论——概念、方法与应用[M].北京:清华大学出版社,2009.
[4] 潘泉,程咏梅,梁彦,等.多元信息融合理论及应用[M].北京:清华大学出版社,2013.
[5] 李士勇.模糊控制[M].哈尔滨工业大学出版社,2011.
[6] 方勇纯,卢桂章.非线性系统理论[M].北京:清华大学出版社,2009.
[7] 钱学森,宋建.工程控制论(上册)[M].北京:科学出版社,2011.
