基于GIS躲避卫星侦察的公路运输机动路线选择
2015-05-09郑贵省车亚辉李月明
王 鹏,郑贵省,王 元,车亚辉,李月明
(1.军事交通学院研究生管理大队,天津300161;2.军事交通学院基础部,天津300161)
公路军事运输是军队实施战役机动和战术运输的主要手段,具有“门到门”运输的灵活性。但公路运输必须依赖道路网络,其运输的安全性和隐蔽性受路网条件影响较大。随着空间技术和航天技术的不断发展,卫星作为各类空间信息传感器的主要搭载平台,广泛用于通信、导航、侦察、气象、测绘等领域。目前,在轨道工作的卫星多达上千颗[1],其中装有高性能光学照相机和合成孔径雷达(SAR)的侦察卫星不在少数,对地面拍照分辨率有的已经能达到1 m以下,而且能克服雾、雨、雪和黑夜条件的限制,实现全天候、全天时的侦察,可以说地面上的目标在其面前几乎是“透明”的。
目前,公路军事运输路线选择时,都是根据既定目标制定最优路线。文献[2]将剩余最短路径、概略通过时间、安全程度作为主要参数,在Dijkstra算法基础上提出了战时军事交通最优路线的一种搜寻方法。文献[3]在地空导弹部队机动路线选择模型中,将被卫星侦察发现的概率作为隐蔽性因素的量化值。文献[4]以运输时间为目标,将战时敌袭扰、破坏等作为时间损耗的随机变量,建立了最短时间路径优化模型。文献[5]结合模糊多目标决策理论,从时间、危险性和保障代价3个维度提出了军事运输路径优化决策算法。文献[6]构建了军事运输路径隐蔽性评价指标体系,并在此基础上建立了基于灰色评价理论的军事运输最大隐蔽性的路径选择模型。
作为军事运输,安全性和隐蔽性是必须要考虑的重要因素,现有文献并没有结合卫星运动轨迹和覆盖范围进行路径选择的研究和分析,尚不能满足公路运输安全和隐蔽的需求。本文通过建立考虑卫星面覆盖的机动路线选择模型,来研究公路运输如何躲避卫星侦察、制定机动路线,并结合电子地图进行可视化输出,为制订公路军事运输方案提供参考和依据。
1 卫星星下点轨迹和覆盖范围
1.1 卫星轨道和星下点轨迹
卫星轨道是指卫星在空间运动时质心的运动轨迹,不同应用的卫星轨道类型是不一样的,不同的轨道类型其覆盖面积和特征也各不相同。目前,主要采用6个轨道要素来表示卫星的运动轨道,即轨道长半径a、偏心率 e、轨道倾角 i、升交点赤经 Ω0、近地点幅角 ω、过近地点时刻 t[7]。卫星星下点是在轨道中某时刻卫星与地心的连线与地球表面的交点,不同时刻的星下点连线称为星下点轨迹。根据星下点轨迹能直观地了解卫星从地球表面哪些地点上空飞过,当考虑地球自转时的卫星星下点轨迹计算式[8]为
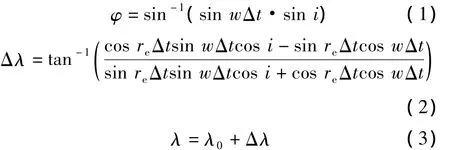
式中:φ、λ分别为地心纬度和地心经度,其经过转换后可得到大地经纬度;w为卫星平均角速度;i为轨道倾角;re为卫星升交点相对于经度零点的西退速率;λ0为卫星经过升交点Ω0时的经度;Δt为卫星经过升交点后经历的时间,其值可以根据卫星轨道6要素和天文学公式求得。
由于摄动和地球自转的影响,卫星绕地球飞行两圈的轨迹是不可能重合的,因此将星下点轨迹能定期重合的卫星轨道叫回归轨道。当卫星的回归周期是几天或几周,这样的轨道称为准回归轨道。侦察卫星为了实现对地球表面大部分地区每隔一段时间的反复观察,其大都采用准回归轨道,其星下点通过地球上某一点每几天重复一次。
1.2 卫星覆盖范围
卫星在某时刻或某时间段,地面上所有能看到卫星的点构成的区域称为卫星的地面覆盖区。卫星在轨道上任一点对地面的覆盖区是以星下点为中心,以一定弧长为半径的地球表面区域(如图1所示)。

图1 卫星对地面覆盖区
图中,O为卫星位置,Oe为地心位置,S为星下点,h为卫星距地面的高度,α为地心角,OP1、OP2与地球表面相切。在理想状态下,根据球面坐标知识,卫星覆盖区域是以OP1为母线做圆锥体与球面相切,切线以内的区域。在实际中,因为最小观测角的影响,覆盖范围将减小至虚线OS1以内的区域[9]。在实际地图标绘中,单颗卫星的覆盖范围可以看作是以卫星星下点为圆心,半径为的圆。将地球视为圆球,随着卫星的运动,瞬时地面覆盖形成地面覆盖带,地面覆盖带为以星下点轨迹为中心,宽度为的条带。
2 边界条件简化
在进行运输计划编制时,首先要根据运输需求,考虑各种影响运输的因素,选择最优的运输路线,其优化目标侧重于经济效益和军事效益。车辆进行运输时,运输路径的选择与运输的物资种类、载运工具类型以及路网条件密切相关。诸如桥梁承重、道路宽度、隧道高度、转弯角度等,以及驾驶人员和指挥人员的素质都会对运输造成影响。本文不考虑这些因素,只针对卫星侦察建立模型。设定车辆行驶速度保持不变,将道路长度转换为时间参数。而卫星覆盖的区域是随时间变化而变化的,运输车辆的出发时间是根据任务需求相对随机的,因此最优路线的选择和时间密切相关。
模型建立前,首先作以下假设:
(1)从A点到B点进行一次公路运输,在24 h之内完成,卫星只对运输机动区域覆盖一次;
(2)卫星形成的覆盖带位于A、B两地之间,不包含A、B两点;
(3)A点与B点有多条路径相连,运输车辆从A到B的机动过程中:若卫星不覆盖其经过的区域则正常机动,若卫星覆盖其经过的区域,则根据卫星的位置和覆盖范围,在其覆盖区域外机动或等待;在卫星过顶时,车辆只要静止伪装规避,即视为不被发现。
3 基于GIS的路径选择模型
在地理信息系统(geographic information system,GIS)中,道路交通网络由带权的图G=(V,E)表示,其中:E为边集合,可视为道路;V为点集合,可视为道路与道路的交点。在GIS中边和点都有与之相联系的权重属性,权重用来表示通过点和边时需要的代价值,其主要通过边和点要素的属性字段来创建。如道路长度、桥梁承重、道路宽度、隧道高度、转弯角度都可以转换为道路权重。由于道路网络比较密集,复杂度较高,因此采用对复杂网络适应度较高的Dijkstra算法作为模型建立的基础。
3.1 Dijkstra算法原理
设带权图 G=(V,E),其中 V是顶点集合,E是边的集合。引进一个代价数组D,它的每个分量D(i)表示当前所找到的从起始点v0到终点vj的最短路径的长度。用邻接矩阵N表示带权图G,N(i,j)表示点 vi到 vj的权值,若 vi到 vj不存在路径,则N(i,j)趋近无穷大。设Vm为已经标记从v0出发的最短路径的顶点集合,其初始状态为空集。算法流程如下。
(1)对代价数组D进行初始化,在N中找到点v0到点vi的权值并赋值给数组D,得到

(2)从数组D中选择vj,使得

vj就是当前从点v0出发求得的最短路径的终点,将点vj加入已经标记的集合Vm中。
(3)检验从点v0到集合V-Vm中任一顶点vk的路径长度,并设置

将vk加入已经标记的集合Vm中。
(4)重复步骤(2)和(3),使得集合V-Vm中所有点都标记,然后退出算法。
3.2 基于GIS的考虑卫星覆盖的路径选择模型
引入时间变量T,vij表示从点i到点j的最短距离,tij表示从点i到j行驶最短距离所用的时间。用S=(P,T)表示卫星的位置随时间的变化,其中P表示卫星位置。模型具体步骤如下。
(1)初始化。根据需求设置起点s和终点e,确定出发时间T0,利用Dijkstra算法直接求出两点之间的最短路径L0,将求解过程中标记的最短路径上的节点k加入集合Q中,此前约定行驶速度恒定,即可得到达时间Tn。
(2)根据T0和Tn,结合卫星星下点轨迹方程,确定T0到Tn时间内,卫星间隔一定时间t经过的所有点位置,将其加入集合P中。利用GIS的地理函数判断集合Q和P中由点连接成的边在空间中是否相交:若不相交,表示卫星在此过程中不覆盖车辆机动区域,即L0为所求行驶路径;若相交,则进入下一步。
(3)根据T0到Tn时间段和该时间段卫星的位置,利用GIS地理函数进行缓冲区分析,生成卫星的覆盖带。在T0到Tn这段时间内,卫星的位置是变化的,车辆的位置也是变化的。利用GIS地理函数确定集合Q中由点连接成的边与覆盖带边界的交点,定离起点较近的交点为S1,较远交点为S2,原路径与覆盖带相交的路段设为L12。确定车辆到达S1的时间为T1,并根据星下点轨迹方程确定此时卫星的位置M1,若卫星覆盖已过L12上空,车辆按L12行驶至S2;若卫星正在覆盖L12,则车辆在S1停止,至卫星通过后,行驶至S2,记等待时间为tw;若卫星将要覆盖L12,则计算卫星从当前位置M1覆盖L12的时间ts,车辆在这段时间内沿L12行驶至节点St,在St规避卫星,记等待时间为tt,待卫星过后行驶至S2。卫星对路段L0覆盖示意图如图2所示。
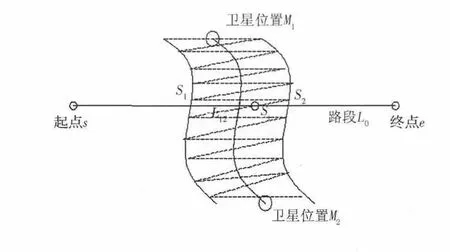
图2 卫星对路段L 0覆盖
(4)记录下车辆行驶过程中,规避卫星的时刻和位置,生成行驶路径。
4 应用与实现
在由 Flex Builder 4.6、ArcGIS Server 10.2 和Oracle Database 11g等软件搭建的平台中对算法进行实现。该平台利用ArcGISServer 10.2提供地图数据服务和空间分析工具,利用Flex Builder 4.6开发平台与地理数据库进行交互。
4.1 卫星星下点轨迹绘制
输入卫星轨道仿真参数,绘制卫星在24 h内绕地球运动的星下点轨迹,设置每15 s绘制一次卫星位置(如图3(a)所示)。根据输入的轨道数据计算卫星的覆盖半径,利用缓冲区分析生成某时刻覆盖范围(如图3(b)所示)。
4.2 行驶路径生成
根据任务需求设置起点和终点,并设定出发时间。生成起点至终点距离最短的路径,绘制卫星在此时间段内的覆盖带,闪烁显示最短路径与覆盖面的交点,并返回交点经纬度坐标值和到达时间(如图4所示)。点击生成方案按钮,将根据进入覆盖带的瞬时时刻,判断卫星的位置,根据卫星的位置,生成在覆盖带内的行驶策略,确定规避点位置或是直接按原路径通过,并在界面下端的文本控件中生成路线的文本信息(如图5所示)。
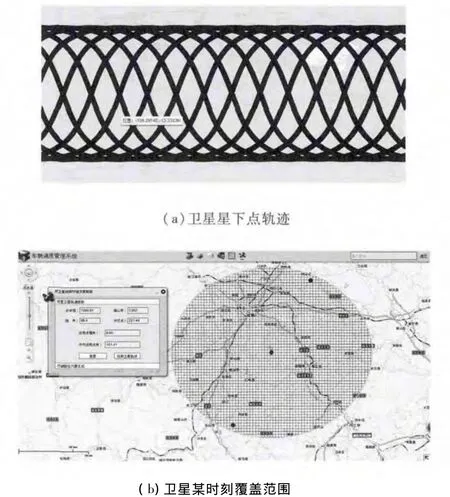
图3 卫星星下点轨迹和覆盖范围
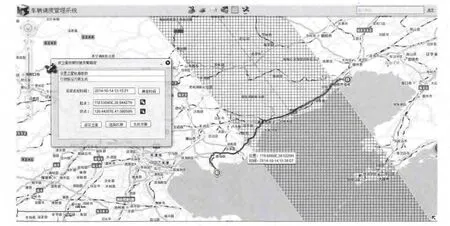
图4 生成行驶路径和卫星覆盖带
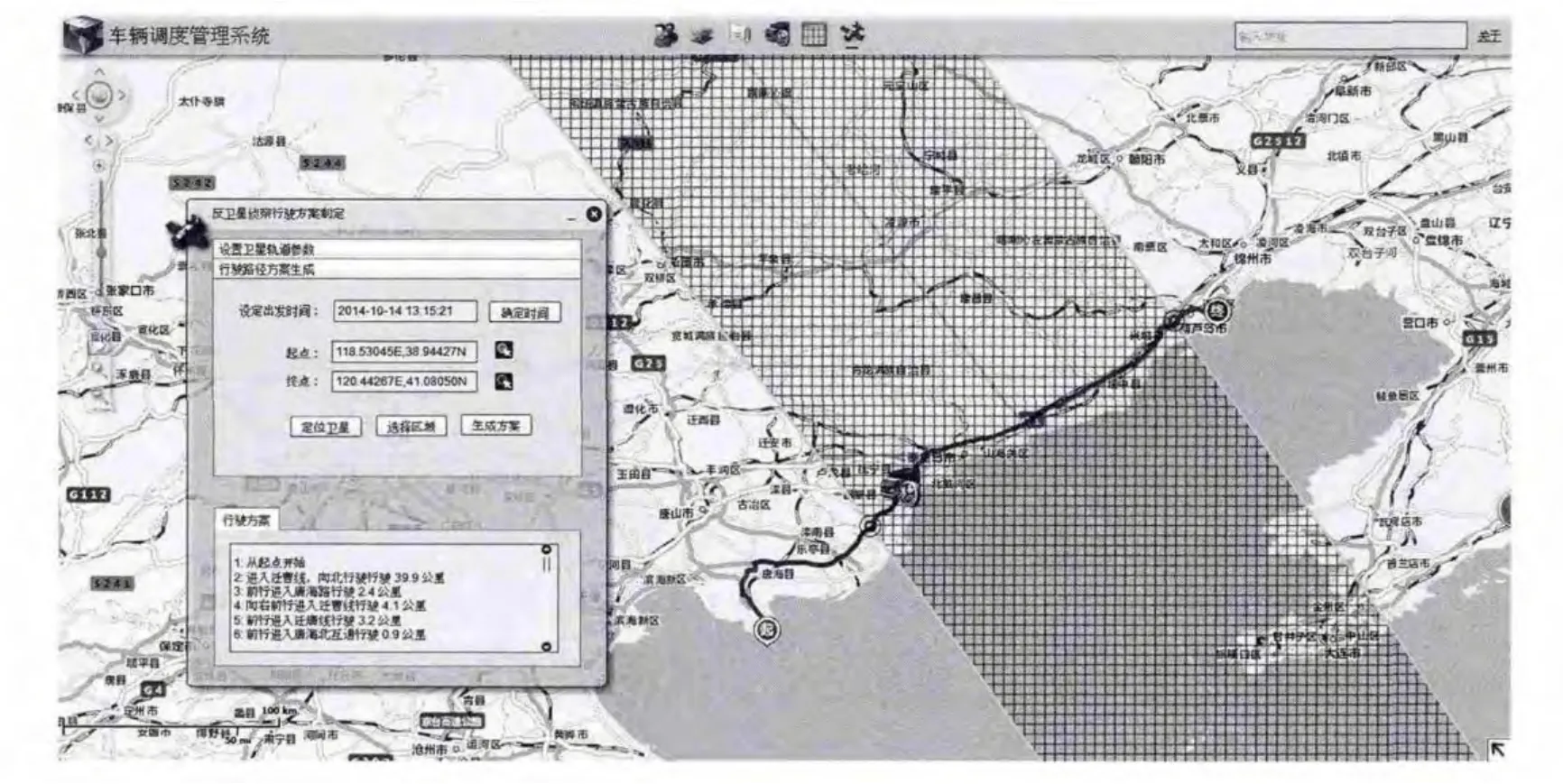
图5 生成行驶路线文本信息
5 结语
本文针对公路运输中需确保运输的隐蔽性和安全性的要求,根据卫星轨道和运行信息,在Dijkstra算法的基础上设计了基于GIS的躲避卫星侦察的路径选择模型,并在软件平台中对其进行了实现。根据卫星轨道,生成避开卫星侦察的路线,并在电子地图上输出,能为运输路线的制订提供安全性和隐蔽性方面的参考。但本文只考虑针对卫星侦察单个因素,公路军事运输路线选择涉及的影响因素较多,如何将这些因素系统完整地纳入进来,建立更加精确的路径选择模型,将是下一步研究的重点。
[1] 靳颖,韩燕侠,高菲,等.2011年国外卫星技术发展[J].太空探索,2012(2):28-29.
[2] 董文禄,王盼卿,齐剑锋.公路军事运输线路的偏好优选法[J].物流科技,2009(2):96-97.
[3] 陈宝印,申铭,黄横,等.基于A*算法的地空导弹部队机动路线选择模型研究[J].舰船电子工程,2010,30(12):78-77.
[4] 石玉峰.战时不确定性运输路径优化研究[D].成都:西南交通大学,2005:10-43.
[5] 石玉峰,门志强.基于模糊多目标决策理论的军事运输路径优化研究[J].交通运输工程与信息学报,2004(1):111-116.
[6] 陈长军.基于信息不确定性的军事运输隐蔽性路径的选择问题研究[D].南京:南京航空航天大学,2010:25-42.
[7] 常显奇,李云芝,罗小明,等.军事航天学[M].2版.北京:国防工业出版社,2005:38-52.
[8] 张云彬,张永生.近圆轨道遥感卫星星下点轨迹的计算[J].测绘学院学报,2001,18(4):257-259.
[9] 马璐,周一宇,姜文利,等.基于MapX的卫星侦察态势显示系统的设计与实现[J].计算机工程与科学,2004(12):79-81.
[10] 吴昊.李传荣,李子扬,等.基于ArcGIS Engine的卫星轨迹可视化仿真[J].微计算机信息:测控自动化,2010,26(4-1):170-172.
[11] 陈子侠,叶庆泰.基于GIS景区公安快速反应系统最佳路径算法研究与应用[J].计算机应用,2006(5):1190-1192.
[12] 贾庆雷,万庆,邢超.ArcGIS Server开发指南:基于 Flex和NET[M].北京:科学出版社,2011:8-20.
