基于NX的液压升降平台参数化设计
2015-05-07张侃楞李青祝
张侃楞, 李青祝
(盐城工学院机械优集学院,江苏盐城224051)
0 引言
升降平台是一种多功能起重装卸机械设备,最常见的是剪叉式液压升降平台[1]。液压升降平台由机械部分和动力部分组成,机械部分主要由底座、工作台和内外剪叉臂组成,而动力部分由液压站及液压缸组成[1]。固定底座式升降平台是一种升降稳定性好,适用范围广的货物举升设备。其主要应用于工件装配时调节工件高度,大型设备装配时部件举升,生产流水线高度差之间货物运送等[3-4]。本文设计一种固定底座式剪叉式液压升降平台。
1 升降平台技术方案的制定
1.1 升降平台工艺参数要求
本设计升降机为全液压系统,相关工艺参数为:额定载荷为20t;升降行程为1200mm;设备自高为650mm;最大高度为1 850 mm;台面尺寸为6 000 mm×2 500 mm;电源为 380 V,50 Hz。
1.2 运动机理图的制定
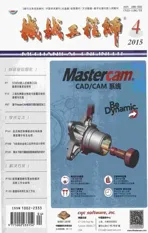
根据升降机的平台尺寸6 000 mm×2 500 mm,由于长度方向尺寸较大,该升降机采用两组单剪叉机构组合形式,两组单剪叉机构在液压平台长度方向对称分布,每组单剪叉机构有2个油缸,沿液压平台宽度方向对称分布。4个液压缸做同步运动,以达到升降机平稳升降的目的。具体运动机理图如图1所示。
如图1所示,两组剪叉由1、2、3、4四个臂架组成,O点为4个等长臂架的中点。2、4臂架下端部在O2点与底座固定铰接,上端部A点处由滚轮与工作台面的下表面相切并可沿其上的导轨面滚动;1、3臂架上端部在O3点与工作台面固定铰接,下端部B点处由滚轮与底座的上表面相切并可沿其上的导轨面滚动;1、2和3、4臂架通过销轴在O点铰接,形成剪叉,均可绕销轴旋转。4个油缸分2对在长度方向对称布置,每对在宽度方向也对称分布。油缸尾部与1、3臂架上焊接的支架在F点通过销轴联接,油缸活塞杆端头与2、4臂架上焊接的支架上的油缸耳板于E点通过销轴联接。随着油缸活塞杆的伸长与缩短,带动油缸耳板绕销轴点O旋转,带动2、4臂架随着油缸耳板绕O点处销轴旋转,由于2、4臂架在O2点与底座固定联接,上端在A点可滚动,因此2、4臂架绕O点旋转的结果是带动2、4臂架绕铰支点O2转动,臂架上端部A点的滚轮沿着轨道滚动。同时,1、3臂架在油缸与2、4臂架在O点销轴施加力的作用下,绕支点O3转动,其下端部B点的滚轮在底座导轨面滚动。通过这种关联运动,来实现升降台工作台面的升降。
图1 液压升降平台运动机理图
1.3 液压升降平台结构尺寸的确定
通过常规的计算,确定的参数为:底座宽度b=5 700 mm;臂架销轴间长L=2400mm,臂架总厂为2513 mm;臂架滚轮间高度h=1 624 mm;油缸耳板两销孔间距r=416.5 mm;θ=40°;ψ=1°;αmin=3°;底座与工作台面两固定铰座销轴的间距X=622 mm。
如图 2(a)、图 2(b)所示,为设计的液压升降平台的结构图,其中工作台面由钢板和矩形钢焊接而成,内外臂架由矩形钢焊接而成。

图2

图3 液压升降平台液压系统原理图
底座6和工作平台1之间宽度方向两侧设置有交叉的内臂架2和外臂架5,内臂架2和外臂架5交叉点设置有销轴3;两侧相对的内臂架2之间设置有上中下3根内臂架连接杆7,两侧相对的外臂架5之间设置有上下2根外臂架连接杆8,内臂架连接杆7的中连接杆和外臂架连接杆8的下连接杆两侧连接液压缸4。内臂架2、外臂架5、内臂架连接杆7和外臂架连接杆8为两对,均匀分布在工作平台的长度方向。
2 液压系统设计
升降平台的升降通过将液压缸的活塞杆的伸缩运动转化为工作台面的升降而实现,负载变化范围为0~20 t,要求负载平稳,结构合理,安全性能优良。
升降平台的液压系统原理图如图3所示。液压油由液压泵形成一定的压力,经过过滤器、节流阀、电磁换向阀、单向节流阀,进入油缸。
当提升重物时,液压油进入油缸下半部,使液压缸的活塞做伸长运动,液压缸上半部回油到油箱。当需要重物下降时,使液压缸的活塞做缩短运动,液压油进入油缸上半部,液压缸下半部回油到油箱。
3 NX参数化建模
液压升降平台结构尺寸确定后,通过NX软件进行零件的参数化建模。在建模过程中,选择合适的草绘平面、参照平面及特征的生成方式,建立参数化的模型。
模型建立好后,根据液压平台各零件的相互位置关系进行虚拟装配,在装配中通过表达式对装配状态可实时控制,如图4所示,通过改变参数H的数值,即可改变液压平台的实时高度位置,可更方便地进行观察和检查。

图4 NX参数化建模
4 运动仿真
进入NX的运动仿真模块,导入虚拟装配的液压平台模型,分别定义连杆、运动副、约束、求解方法和输出的结果类型,如图5所示。

图5 运动仿真
通过NX软件的运动分析功能,可对机构进行运动学和静力学分析,包括干涉分析、运动极限位置分析、轨迹跟踪、图表、测量、动画等,同时还能分析零件在运动过程中的受力情况,如图6所示为销轴的受力图。
图6 销轴受力图
通过运动分析的结果,可以及时修正相干涉组件的结构,将问题解决在设计状态,提高设计效率。
5 结论
介绍了液压升降平台的设计过程,用NX建模、运动仿真模块进行剪叉式升降台的三维设计及运动分析,可以完成升降台的干涉检查,运动特性分析等,将减小设计工作量,且设计更加直观,降低出错率。
[1] 毛建军.铜包装线升降平台机-液压特性研究与优化[D].兰州:兰州理工大学,2010.
[2] 谢力生.剪式液压升降台相关参数的确定[J].工程机械,2008(11):46-49,89.
[3] Neugebauer R,Sehwaar M,Ihlenfeldt S.New approaches to machine structures to overcome the limits of classical parallel structures[J].CIRP Annals-Manufacturing Technology,2002,5(1):293-296.
[4] 丁智平.气液动剪叉式升降平台运动受力分析及其应用[J].株洲工学院学报,1999(6):49-52.
[5] 郭永耀,刘力.ADAMS/view在剪叉式液压升降平台关键参数确定上的应用[J].现代制造技术与装备,2006(6):38-40.
[6] 杨达毅,陈丽敏.基于SolidWorks的六自由度液压平台运动仿真[J].机床与液压,2008(9):127-129,150.