双参考站单频相位实时精密监测技术
2015-05-06阳仁贵柳培钊刘根友
阳仁贵,柳培钊,2,刘根友
双参考站单频相位实时精密监测技术
阳仁贵1,柳培钊1,2,刘根友1
(1.中国科学院测量与地球物理研究所 大地测量与地球动力学国家重点实验室,武汉 430077;2中国科学院大学,北京 100049)
针对大型构筑物在各种荷载下的动态响应实时精密监测问题,提出了一种基于全球导航卫星系统双参考站单频载波相位实时精密定位的技术,即采用双参考站与单频观测的监测点组成双基线实时精密监测位置变化。该技术能克服单参考站精密定位技术的一些不足,确保了监测结果的可靠性、实时性和精度。在桥梁施工测量和形变监测中的一些初步试验显示:无需初始化即能可靠固定单历元单频相位模糊度,定位精度获得了提高,实现单历元平面位置定位精度mm级水平。
双参考站;形变监测;单频相位;实时精密定位
0 引言
大型桥梁、水坝等工程建筑物在施工和运营过程中常会面临各种荷载的影响,需要进行实时动态响应监测。传统的监测手段主要有加速度传感器法、激光准直法、全站仪法等,但是这些方法在实际工程应用中均在不同的方面表现出一定的局限性。全球导航卫星系统(global navigation satellite system,GNSS)技术用于监测具有精度高、不受气候及通视条件限制、高度自动化等优点,可获得监测体全天候的三维瞬时位移信息。随着GNSS软、硬件技术的不断发展与完善,特别是高采样率GNSS接收机的出现,其作为一种新的实时监测技术手段正越来越受到人们的关注和应用试验[1-3]。在实时精密定位技术应用中,常规实时动态(real time kinematic,RTK)定位是被广泛采用的技术,有学者也研究了应用该技术测量建筑物风荷载动态响应。RTK技术应用虽然简单方便,但是有其固有的不足,首先是要求监测站与参考站距离不能太大,在15 km范围内效果较好;其次,RTK系统一般应用的数据处理模式是单参考站模式,对于大跨度桥梁监测系统,监测点布设在桥梁或桥墩上,而参考站常设置在桥两端的稳定基岩体上,如果RTK系统只能利用其中一个参考站数据信息进行实时精密差分或相对定位,那么监测点定位精度将随着与参考站距离的增大而降低,导致桥梁一端的监测点与另一端的监测点定位精度相差较大。同时,由于在数据处理时只能应用单参考站进行定位,定位结果的可靠性无法得到保证。现有国外厂家提供的RTK系统一般为价格较贵的双频接收机,不利于降低监测成本。而单频RTK技术要么需要可靠的初始位置坐标,要么需要较长的初始化时间,且要求观测相位保持连续观测(不发生周跳和失锁),否则又需要重新初始化。此外,由于通讯距离有限,对于较长的桥梁还需要在桥面中间布设通讯中转站,以实现实时差分信息传输。为了解决这些问题,本文研究了双参考站单频精密定位技术,即应用双基准站作为参考站同时与监测站形成单频载波相位的双差相对定位方程,并应用合理的内部先验信息构建约束方程来进行精密定位数据参数估计和相位模糊度实时可靠固定[4-7]。研制的软件系统在长度达15 km的大型桥梁上进行了实时精密定位应用实验,结果显示本文算法实现了单历元模糊度解算成果率达99.99%以上,而且平面位置精度提高到mm水平,优于同时实验的RTK系统定位结果(1~2 cm)。
1 双参考站GNSS监测网及精密定位模型
1.1 双参考站GNSS监测网
桥梁在施工和运营过程中将发生荷载变化,尤其那些运营时间较长的桥梁,其面临问题包括冲刷、老化、劣化等导致耐震强度降低,一旦发生台风、地震或水灾等大规模天然灾害时,桥梁倒塌或断裂的机率增大,因此需要进行全天候的实时动态响应监测[1],一旦发现有异常变化或异常发展趋势才能及时提出预警,并及时进行诊断评估和修复加固。实时监测网络可以在施工阶段就进行布设,以方便施工测量应用。为节约成本,可以布设如图1所示(某桥梁监测网示例)简单的施工测量和监测合用的双参考站GNSS监测网络。这种布设方式方便在通视好的条件下进行测距和测角等可靠的常规精密测量,以验证GNSS技术应用的可靠性和精度。这里只讨论GNSS全天候实时精密监测技术实施方案和算法。当然从几何图形构建来看,布设多于三个以上参考站更好,但是从经济角度考虑,只用GNSS双参考站作为参考站也能满足实时精密监测和施工测量的精度要求,因此本文只探讨如图1所示的双参考站实时精密定位技术算法和软件实现。
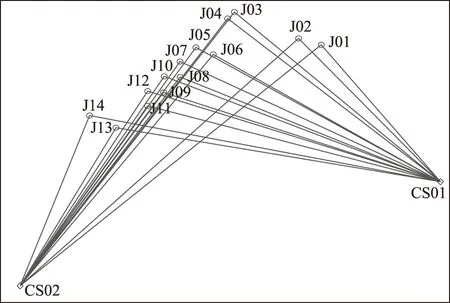
图1 GNSS双参考站实时精密监测网
1.2 双参考站精密定位模型
GNSS快速甚至实时精密定位一般采用站间和星间同时求差的双差观测模型[8]。双差模型可以有效地消除站与站及星与星间相关误差的影响,同时可以利用双差相位模糊度为整数这一特性显著地提高定位的效率和精度。位置参数估计需要的观测量有分米级精度的码伪距和毫米级甚至亚毫米级精度的载波相位。对于瞬时精密定位,为了保证精度,伪距观测量一般不参与最终的精密定位解算,只是在初始阶段被用来计算非线性方程进行线性化所需要的监测点近似位置,因此这里只简单列出载波相位精密相对定位模型。
当基线长度在15 km以内且站间高差相差不大时,采用站间差分法可以有效地消除电离层和对流层折射延迟误差的影响,桥梁监测系统参考站与监测站间的距离一般在此范围内,因此,忽略残余的双差大气折射误差后,载波相位双差定位模型可表示为:
(1)
式(1)中,A和B分别表示基线分量改正数参数x和双差模糊度参数a的设计矩阵,y为O-C项,v为噪声误差,下标表示参考站号。

由于参考站1,2均为坐标精确已知的固定站,故不再需要设置基线分量参数,于是参考站基线构建的双差误差方程可简化写为:
(2)
因此,模糊度参数a3的加权最小二乘实数解为:

(3)

(4)
式(4)中,round(·)表示最邻近取整。同时,各基线相位模糊度参数之间存在如下线性关系:
a3=a1-a2
(5)

对于式(1),由于参考站为坐标已知的固定站,那么参数x的值相当于监测站位置改正数,因此理论上分析x1与x2的值应完全相等。综合式(1)、式(2)和式(5),可组合成如下方程组:
(6)
化简为
y=Ax+Ba+v
(7)
于是求解相位线性化方程的整数最小二乘准则表示如下[9]

(8)
式(8)中,由于双差模糊度为整数参数,所以不能直接解算。为了方便,先忽略模糊度整数特性,即先进行简单的实数最小二乘解算:
(9)
从而可获得基线分量和模糊度参数实数解和方差阵为:
(10)
由于快速精密定位模糊度参数之间存在较强相关性,因此获得的基线分量估计精度不能满足精密定位的要求,必需解算模糊度整数解,即在一定的准则下,从实数空间映射到整数空间,从而固定到正确的整数值。模糊度整数解搜索固定准则[9]为:
(11)


(12)
如果式(7)表示的是卫星数为m+1的单历元单频相位观测方程,那么方程个数为3m,待定参数个数为2m+6,看似只要m≥6就可以进行最小二乘参数估计,但是该方程存在行相关性,故仍然是不适定的。解决的方法是要么伪距观测值与相位观测值联合解算,这时估计的模糊度参数和基线分量参数的精度将完全由伪距观测值的精度决定;要么多个连续历元的相位观测数据一起解算,但当数据为高采样率观测时,卫星与接收机组成的几何空间在几个历元内变化很小,因此方程仍然是严重病态的,较小的观测误差将显著放大参数实数解的估计误差。因此,在一定的准则下,从实数空间映射到整数空间,从而固定到正确的整数值,这是保障定位精度和提高工作效率的关键。
2 模糊度实时解算算法
快速甚至实时精密定位,一般采用三步法处理,即先应用最小二乘法(或卡尔曼滤波估计法)解算模糊度的实数解;再根据实数解和方差-协方差阵构建搜索空间,利用搜索法确定最优模糊度整数解;最后再计算精密的基线分量解,所以,模糊度实数解和方差-协方差阵是模糊度整数解可靠高效确定的前提基础。前面已介绍计算单历元或几个历元的相位模糊度要么是与伪距联合计算,要么是应用解不适定问题的参数估计方法。伪距与相位联合解法比较简单,只要合理设置相位与伪距之间的权比就行。但是由于伪距精度有限,所以这种解算方法不是很可靠。下面只介绍解不适定问题的方法[10-12],来计算模糊度实数解,该方法不管是面对单历元还是多个历元都能可靠的估计模糊度的实数解,有利于后续整数解可靠和高效的固定。
解不适定问题,一般采用增加先验信息约束的方法。在相位瞬时精密定位中,单历元方程存在秩亏问题,多个历元联合解存在严重病态问题,因此,本文采用基于正则化理论求解模糊度的实数解的算法—选权拟合法。
根据吉洪诺夫正则化理论,建立如下改进的正则化估计准则,称之为选权拟合参数估计法[5-6],即只对部分待定参数进行选权约束,新参数估计准则如下表示:

a∈R2m;D{y}=Qy
(13)
式(13)中,γ为权因子;C为基线参数x的拟合矩阵。由式(13)即可获得模糊度参数实数解估计值和误差阵如下所示:

(14)


(15)

(16)
模糊度整数解的可靠性可用Ratio检验法判定,即模糊度残差2范数的次最小值与最小值的比值应大于某一数值δ(一般取值为大于1.5),否则求得的整数解是不可靠的,需要增加新的观测数据来固定整周模糊度。该检验方法有时不是很可靠,本文应用一种改进的模糊度检验方法[13],提高了模糊度整数解判定的可靠性。


(17)
上述采用附加约束的方法估计模糊度的实数解时,需要精度较高的监测站初始位置坐标,一般要求分米级精度,这在实时监测中比较容易实现。由于瞬时位移变化较小,前面已获得定位结果可以作为后续数据处理的先验条件。

(18)
3 监测系统数据处理方案和软件实现
基于上述理论模型和算法分析,设计了基于双参考站实时精密监测的数据处理方案,并研制了相应的软件系统。其数据处理流程如图2所示:

图2 数据处理流程
该软件系统已在大桥工程施工测量和精密形变监测中得到应用试验,与RTK相比,不再需要RTK定位的初始化过程,平面位置精度有一定的提高,实现了瞬时(单历元)平面位置毫米级和垂直方向2 cm以内精度水平。
4 实验分析
某桥梁建立了如图1所示的GNSS实时监测网,取其中一个监测点的静态观测数据进行试验,与参考站1(CS01)相距约3 km,与参考站2(CS02)相距约8 km。数据采样间隔为15 s,卫星截止高度角为15°,观测时间为90 min。在数据处理中采用如下两种实验方案:
(1)基于固定了模糊度的单频载波相位进行单参考站单历元精密定位并评估实时定位精度,基线长度约为8 km;
(2)应用双参考站单频相位单历元精密定位并评估实时定位精度。
监测站各历元近似坐标应用实时相位平滑伪距逐历元进行相对定位获得。双基线和单基线在相位模糊度固定后的单历元定位结果与长时间段数据静态定位结果作差比较。平面位置(E分量与N分量)和垂直方向(U分量)单历元定位结果与已知可靠值之间的偏差(dE、dN和dU)如图3和图4所示。

图3 双参考站单历元定位精度
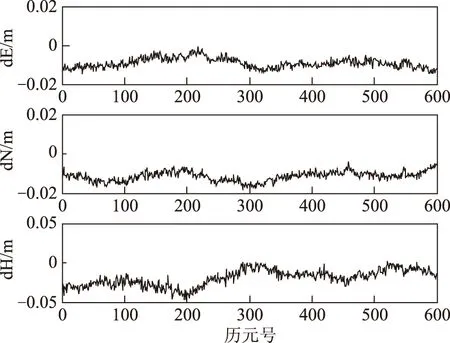
图4 单参考站单历元定位精度
两种定位方案实现的单历元定位精度在E、N和U方向的偏差均值(Mean)和均方根(root mean square,RMS)误差如表1所示。
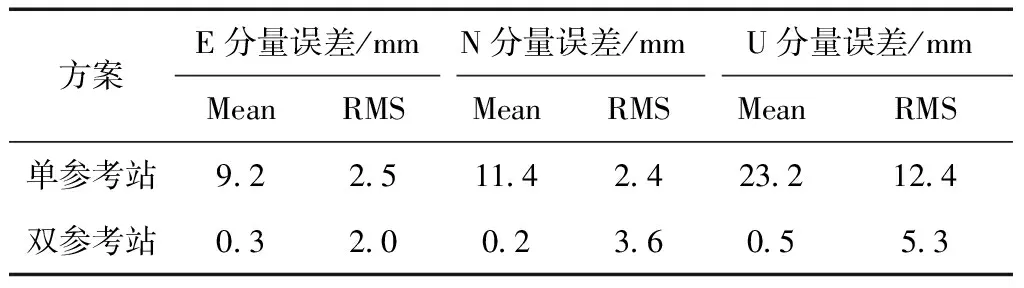
表1 单历元定位精度统计
由图3、4和精度统计表1可知,双参考站实现实时精密定位精度为亚厘米级水平,其中垂直方向位置精度比平面方向定位精度低2倍。而单参考站定位精度平面位置在2 cm左右,垂直方向变动范围为4 cm以内,且平均值也有厘米级偏差,因此双参考站提高了实时精密定位的精度。多套试验数据结果显示,当共视卫星数为6个以上时,且伪距粗差能进行可靠的抗差抑制时,本文方法实现了双参考站单频相位模糊度单历元解算成功率达99.99%以上,有利于瞬时形变信息和动态响应精密测量。
5 结束语
本文根据大型桥梁等工程构筑物在施工和后期维护过程中动态响应实时观测需求,提出了基于GNSS双基准参考站单频相位进行实时精密位移监测的方法,并设计了实时流数据处理算法,解决了其中最为关键的单频相位模糊度单历元实时可靠解算问题。其中的关键技术是在获得可靠的初始位置后,利用先验信息构建选权拟合方程来解算单频相位模糊度实数解并进而固定为整数解,同时附加基线模糊度闭合环为0的条件约束来验证模糊度整数解的可靠性。实验结果显示,在双参考站与监测站距离均为15 km以内时,忽略大气折射误差影响,可实时获得毫米级以内精度水平。如果设定GNSS为高频观测,即监测数据历元间隔为1 s甚至小于1 s,单历元算法能监测到构筑物位置瞬时变化,从而获得各种荷载条件下产生的瞬时动态响应。在监测点应用单频接收机进行观测,采用单频相位处理算法,节约了实时监控运行成本。工程应用实验显示,本文研究成果具有成本低、速度快(实时)、自动化程度高、全天候工作和方便长期连续监测等优点,从而为大型桥梁、水坝等构建物的形变和经受突发荷载时的动态响应提供了一种可靠的自动化测量手段。虽然在一些大坝监测系统中,也应用了多参考站方法,但是采用的定位处理模式是较长时间段数据静态处理算法,这种模式获得的位移信息是几个小时甚至一天内的平均变化量,而本文方法着重于实时获取形变体因荷载变化产生的瞬时响应,具有更好的预警性。
[1] MOSCHAS F,STIROS S.Measurement of the Dynamic Displacements and of the Modal Frequencies of a Short-span Pedestrian Bridge Using GPS and an Accelerometer[J].Engineering Structures,2011,33(1):10-17.
[2] 戴吾蛟,朱建军,丁晓利,等.GPS 建筑物振动变形监测中的单历元算法研究[J].武汉大学学报:信息科学版,2007,32(3):234-241.
[3] 余学祥,徐绍铨.GPS 变形监测信息的单历元解算方法研究[J].测绘学报,2002,31( 2):123-27.
[4] 刘根友,朱耀仲,韩保民.GPS单历元定位的阻尼LAMBDA算法[J].武汉大学学报:信息科学版,2004,29(3):195-197.
[5] OU Ji-kun,WANG Zhen-jie.An Improved Regularization Method to Resolve Integer Ambiguity in Rapid Positioning Using Single Frequency GPS Receivers[J].Chinese Science Bulletin,2004,49(2):196-200.
[6] YANG Ren-gui,OU Ji-kun,YUAN Yun-bin,et al.Solving Single-frequency Phase Ambiguity Using Parameter Weights Fitting and Constrained Equation Ambiguity Resolution Methods[J].Journal of Central South University of Technology,2006,13(1):93-98.
[7] 阳仁贵,欧吉坤,袁运斌.相位实时差分技术应用于飞行器交会对接研究[J].中国科学 G辑:物理学 力学 天文学,2010,40(5):651-657.
[8] XU Guo-chang.GPS Theory,Algorithms and Applications[M].Berlin:Springer-Verlag,2003.
[9] TEUNISSEN P J G.Theory of Carrier Phase Ambiguity Resolution[J].Wuhan University Journal of Natural Sciences,2003,8(2B):471-484.
[10]欧吉坤.测量平差中不适定问题解的统一表达与选权拟合法[J].测绘学报,2004,33(4):283-288.
[11]沈云中,许厚泽.不适定方程正则化算法的谱分解式[J].大地测量与地球动力学,2002,22(3):10-14.
[12]杨元喜,刘念.拟合推估两步极小解法[J].测绘学报,2002,31(3):192-195.
[13]阳仁贵,刘根友,柴艳菊.一种检验GNSS 相位模糊度整周解算有效性的方法[J].全球定位系统,2011,36(1):1-6.
Single Frequency Phase Instantaneous Monitoring Technique with Dual Reference Station
YANGRen-gui1,LIUPei-zhao1,2,LIUGen-you1
(1.State Key Laboratory of Geodesy and Earth’s Dynamics,Institute of Geodesy and Geophysics, Chinese Academy of Sciences,Wuhan 430077,China; 2.University of Chinese Academy of Sciences,Beijing 100049,China)
A single frequency carrier phase positioning approach based on two GNSS reference stations is suggested through analyzing the real-time precision monitoring problem for some large building structures under different loads.Namely,two baselines are constructed to measure the instantaneous displacement of the monitoring station through processing single frequency phase and code observations from two fixed reference stations and one monitoring station.This technique facilitates to extract the displacement monitoring information from the estimated instantaneous position,and ensures to achieve that of instantaneity,reliability and precision of the monitoring result.Some preliminary tests were implemented in the bridge construction survey and deformation monitoring system.These tests presented that the new algorithm no longer required an initialization process for fixing phase ambiguity reliably,and could achieve higher positioning accuracy than that of single reference station system.Multi-test results also presented that horizontal positioning with mm to cm accuracy could be achieved with only one epoch observables.
dual reference station;deformation monitoring;single frequency phase;instantaneous precise positioning
阳仁贵,柳培钊,刘根友.双参考站单频相位实时精密监测技术[J].导航定位学报,2015,3(3):63-68.(YANGRen-gui,LIUPei-zhao,LIUGen-you.SingleFrequencyPhaseInstantaneousMonitoringTechniquewithDualReferenceStation[J].JournalofNavigationandPositioning,2015,3(3):63-68.)DOI:10.16547/j.cnki.10-1096.20150313.
2015-05-18
国家自然科学基金(41174031、41021003),大地测量与地球动力学国家重点实验室(SKLGED2013-4-1-Z)。
阳仁贵(1972—),男,湖南邵阳人,博士,副研究员,主要从事GNSS理论、算法及应用研究。
P
A
2095-4999(2015)-03-0063-06
