基于磁信号的成像探测引信交会目标识别技术
2015-04-20王西泉
李 凯, 王西泉, 韩 焱
(1.中北大学 信息探测与处理技术山西省重点实验室,山西 太原030051;2.中国兵器工业试验测试研究院,陕西 华阴714200)
0 引言
成像探测引信是各国争相发展的引信技术,是实现引信智能探测的重要措施。对弹目交会时多目标识别、要害部位选择具有优越性,且兼备抗雷达隐身和电磁干扰能力[1]。目前,对红外、可见光、激光、毫米波、混合式红外/毫米波等成像探测引信技术的研究,已进入技术应用阶段。成像探测引信融合了成像探测、图像处理、模糊识别与智能化引战配合等技术[2],其发展将为武器精确选“点”打击目标提供技术支撑,提高杀伤效果。
1 国内外研究现状
近年来,各国通过研究多模信息成像技术,提升了精确制导武器的打击效果。成像引信在弹目交会时对目标具有更高的探测精度,具备目标易损部位识别、多目标识别、方位判定等功能,可以大幅度提高成像探测引信对目标的分辨能力。
美国的AIM-9X 采用弹载数据处理器处理红外成像导引头采集的图像信息,对高帧速序列图像进行分析,实现弹目交会时目标易损部位的精确识别,进行“点”打击;俄罗斯的R-73采用了多元红外成像导引头,具备了较高的多目标识别和抗热源干扰能力。在弹道终端快速识别弹目交会时目标的易损部位,实时输出运动偏置信号,对目标瞄准点方位信息实时更新。该导引头把目标飞机的驾驶舱和飞行员作为识别目标,以提高武器的杀伤力[3]。
红外成像一体化引信将红外成像导引头探测系统作为弹目交会时的目标探测器,通过与导引头探测系统的信息融合,实现目标和目标易损部位的精确识别[4-5]。导引头位于导弹最前端,对目标进行前视探测。导引头的作用距离比引信远,可提前获得弹目交会信息。相比传统工作方式的引信,红外成像一体化引信可以更早地获取更完整的交会目标图像信息,对后期交会目标图像处理、目标识别、跟踪及起爆控制等复杂算法的实现提供更多的时间,从而提高导弹战斗部精确起爆能力。
激光成像引信技术可实现弹目交会时的目标测距和目标识别。激光引信主要采用雪崩光电二极管探测器实现成像探测[6]。美国将激光成像引信成功用于AGM-129和AGM-130空射巡航导弹的,显著提高了制导精度。以色列Rafael公司的空空导弹采用雪崩光电二极管探测器技术,能够在发射后自动锁定目标,并具有选择目标易损部位的能力[7-8]。
为了获取更多的弹目交会信息,三维激光成像图像识别方法得到发展,但图像信息数据量大,高分辨、高识别率、快速识别能力较差。
成像探测引信是我国引信技术的重要组成部分,传统的程序探测引信在处理交会目标图像信息时,对识别速度的适应性较差。在制导武器各种成像探测引信和传感器的现有基础上,如何利用传感器的特性实现高精度的引信目标识别,是急需解决的问题。本文通过研究磁传感器测量武器的旋转参数,利用旋转参数确定图像匹配的视场方向,缩小目标图像匹配的范围,提升弹目交会时目标识别的速率,为成像探测引信的快速图像处理提供一种新方法。
2 旋转图像交会原理
2.1 引信旋转立体视觉成像原理
引信在旋转过程中,图像传感器采集的连续相邻两幅图像构成立体视觉的一对图像,相当于图像传感器沿着某一中心轴旋转,形成两个不同视场方位同时观察同一目标物的情况。成像探测引信获取的图像信息取决于视场方位内覆盖的图像信息。成像探测引信获取的视场取决于图像传感器光轴的方向。引信旋转立体视觉分析时,连续相邻两幅图像的交会情况由这两幅图像的视场方位重叠区域决定。因此,在成像探测引信结构和图像传感器光轴方位确定的情况下,可根据成像视场方位确定成像探测引信目标图像交会的几何重叠区模型,通过一系列的几何变换估算出交会图像中可能存在图像重叠的最大区域[9]。其成像原理如图1所示。
C1、C2分别代表连续相邻两幅图像成像视场方位,O1、O2代表引信旋转时图像探测器获取的连续相邻两幅图像,θ 为图像探测器成像时旋转的夹角。
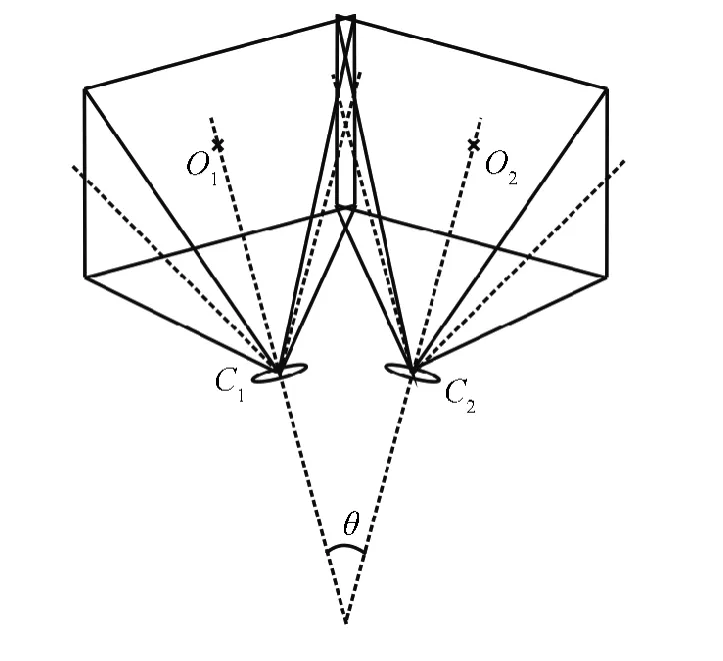
图1 引信旋转立体视觉成像模型
图1所示的交会模型中,由第一个视场方位C1获取的图像O1和第二个视场方位C2获取的图像O2构成立体视觉的交会图像。成像视场方位交会区域为以图像O1的右侧边界为一条边,以图像O2的左侧边界为另一条边的矩形区域。由过第一个视场方位线平行于第二个视场方位线的平面构成相交视场方位平面。可以证明,在确定相邻两幅图像视场方位平面的视场角、视场方位在相交视场方位平面的夹角、成像探测引信位置后,图像重叠的矩形区域占图像的比例系数随着交会目标与成像探测引信距离的增加趋近于某一极限值。
2.2 引信旋转立体视觉交会模型
图2为图1中引信旋转过程中相邻两个视场方位成像时交会的平面几何模型。图中:α 为成像探测引信在相交视场方位平面内的视场角;θ为两个相邻两个视场方位成像的夹角;β 为相交视场方位平面内连续相邻两幅图像成像的视场重叠角度;s为两个相邻两个视场方位成像的成像探测引信图像探测器成像中心点的距离。

图2 引信旋转立体视觉交会几何模型
x/y 的值为图像重叠区域在原图像中所占的比例。由几何关系可知:

当a、θ、s已知时,通过公式β=α-θ可得相交视场方位平面内连续相邻两幅图像成像的视场重叠角度β,则式中m =2ssin(α/2)/sin(β/2)为一确定值。
在图2中,当弹目交会目标与成像探测引信的距离趋近于无穷时,成像前段距离a 也趋近于无穷大时,m/a 趋于0,式(1)对a 求极限,可得x/y 趋近于:

所以,成像探测引信采集的目标图像重叠区域在原图像中所占比例小于k。
采用上述交会成像模型,成像探测引信旋转某一角度后采集的两幅图像O1和O2进行特征匹配分析时,应针对重叠区域的图像进行。O1图像搜索区域为此图像右上顶点到光轴旋转过角度的边界,即顶端边界的像素值乘以k。同理,可得O2图像的搜索区。
通过上述方法,使交会目标的图像匹配区域缩小,有效限定了目标的匹配范围,提高了成像探测引信处理速度。
3 系统组成
针对旋转武器的图像探测引信,引信内部安装磁传感器,外壳安装成像探测器部件,通过两者的信息融合,实现弹目交会时目标的快速图像识别。
磁信号作为成像探测引信的周期校正数据时,采用图3所示的快速目标识别流程。
引信外壳成像探测器采集目标图像。获取的目标图像通过旋转信息和图像联合识别目标图像的方位信息,其结果和先期交会的目标信息匹配,进行目标识别。系统启动时,先对交会的目标信息进行图像特征提取,该目标图像需要多幅不同角度的信息共同构成目标特征信息。利用磁传感器获取的旋转信息,得到引信旋转时成像的视场方位信息,融合目标的图像特征信息和目标在连续图像中的位置信息,进行实时目标图像识别。若不是目标则再进行成像识别,直到正确识别目标,然后提取目标的方位信息。

图3 旋转武器的图像探测引信快速目标识别流程
对图1所示的成像探测引信所获取的相邻两幅图像进行交会目标图像特征匹配,采用引信旋转立体视觉交会模型,在相邻两幅图像中分别选取与另一幅图像成像视场方位信息一致的交会区域进行特征点提取。根据特征点的分布情况对目标图像进行特征匹配,可有效减少图像匹配搜索区域,快速确定目标方位。
4 仿真分析
为了比较旋转信息和成像探测引信的快速目标方位解算的效果,使三轴线圈式磁传感器和图像传感器匀速旋转,模拟武器旋转时获取磁传感器信号和图像信息。以20(°)/s2的匀加速旋转,加速到400(°)/s的旋转速率,运行一段时间后,以20(°)/s2减速到停止,测得磁传感器信号的原始数据,如图4所示。

图4 三轴转台模拟图像探测引信旋转时的磁传感器输出信号
模拟成像探测引信旋转时获取弹丸目标图像,如图5所示。图像传感器先采集到图中所示的实线区域A,之后采集到图中所示虚线区域B。按图3所示的处理流程,对成像探测器采集的图像进行区域划分,传感器旋转的角度决定了图像交会的区域C,图像匹配时只需对区域C 进行分析,这样可以有效减少运算量。
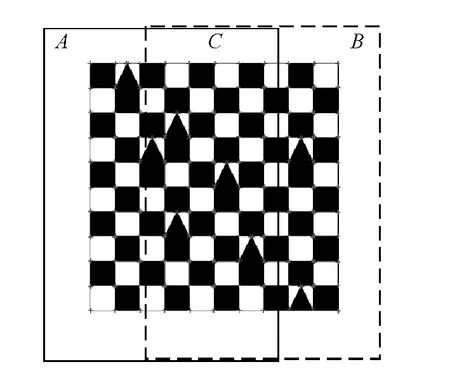
图5 三轴转台模拟图像探测引信旋转时 采集的相邻两幅图像示意图
从图5的图像区域分割可以看出,无论待匹配图像中的目标物角点分布情况如何复杂,使用本文的方法可取得良好的匹配效率。相对于传统的在整幅图像区域内进行图像特征的提取与匹配方法,在视场方位重叠区内进行图像特征的提取与匹配能大大减少特征提取的工作量,缩短匹配用时,如表1所示。匹配结果消除了图像可能的最大重叠区域外的明显的误匹配点。降低了错误识别概率。
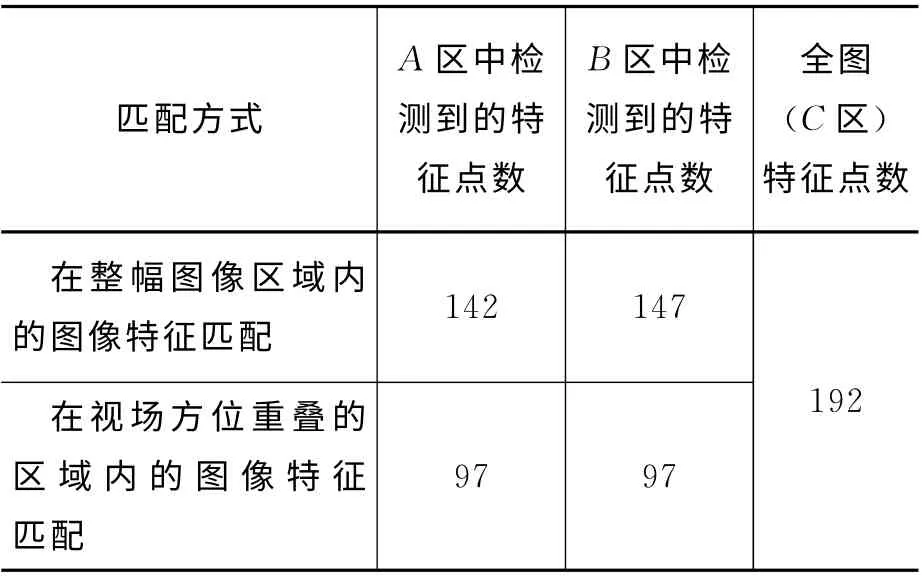
表1 图像匹配数据对比
5 结论
采用磁传感器获取的周期信号对采集的目标图像进行融合,利用目标图像特征进行匹配,可以克服常规成像探测引信需要全图像搜索识别用时多的问题。采用成像视场方位对交会目标进行图像识别,有效降低了误识别的概率,快速确定目标方位。
本文设计的基于磁信号的成像探测引信交会目标图像识别技术也可用于红外、激光等成像探测引信。
[1] 胡以华,方抗美,舒嵘,等.对地观测激光扫描成像探测效果研究[J].红外与毫米波学报,2001,(5):335-339.
[2] 孙志慧,邓甲昊,闫小伟.国外激光成像探测系统的发展现状及其关键技术[J].科技导报,2008,(3):74-79.
[3] 许敬,张合,郑鹏飞,等.光电成像探测中目标方位测量方 法[J].强 激 光 与 粒 子 束,2013,(3):574-578.
[4] 李健.红外成像GIF 引信起爆控制算法研究[D].南京:南京理工大学,2010.
[5] 刘斌,涂建平,庄志洪.红外成像GIF 引信起爆控制算法研究[J].探测与控制学报,2005,(5):22-25.
[6] 王小驹,张顺法.基于线列雪崩光电二极管的激光引信成像探测[J].探测与控制学报,2012,(6):6-10.
[7] 何小坤,谌德荣,等.智能弹药成像引信对地面车辆定位的算法研究[J].兵工学报,2014,(10):1549-1555.
[8] 董吉辉,胡企铨,孙东松.空间激光成像跟踪系统中的图像噪声抑制技术[J].中国激光,2011,(1):233-237.
[9] 魏林媛,韩焱,李凯.一种基于成像光路的图像匹配技术[J].计算机工 程与应用,2011,(35):193-195.
