大气偏振光导航技术
2015-04-19刘俊,唐军,申冲
刘 俊,唐 军,申 冲
(电子测试技术国家级重点实验室,仪器科学与动态测试教育部重点实验室,中北大学仪器与电子学院,太原030051)
大气偏振光导航技术
刘 俊,唐 军,申 冲
(电子测试技术国家级重点实验室,仪器科学与动态测试教育部重点实验室,中北大学仪器与电子学院,太原030051)
为克服现有导航技术在战场应用中存在的不足,借鉴生物光学导航机理,开发新的导航方式,是未来导航技术研究的一个重要发展趋势。本文对自然界中的昆虫光学导航机理进行了介绍和分析,并对大气偏振光导航的发展趋势进行了探讨,提出了大气振光导航技术发展过程中需要解决的关键问题。
仿生技术;大气偏振光;偏振光导航;惯性/偏振光组合导航
0 引言
昆虫具有简单的大脑和极其微弱的计算能力,但是却表现出令人惊叹的复杂导航行为。亿万年的进化,使得昆虫具有了与哺乳动物截然不同的神经结构和导航机理。因此,研究昆虫的导航原理,并将其应用于现代导航技术,已经成为导航学未来发展的趋势。
研究显示,沙蚁、蟋蟀、蝗虫等昆虫通过利用其复眼结构以及子眼内部的偏振敏感单元对天空偏振光模式进行感知。它们即使在晴空面积少于10%或天空布满大雾的情况下仍能准确的确定出偏振度与偏振角,从而确定方位。其偏振光感知的核心机理为其敏感神经元(POL-神经元)具有高的偏振对比度,其检测鲁棒性好,具有很高的容错率,可实现高精度的偏振信息提取。同时曲面复眼结构具有大视场、响应快、精度高等特点,可实现大区域条件下的偏振态的实时检测[1-2]。
基于自然偏振特性的仿生偏振光导航方法是一种新型自主导航方法,是以沙蚁等生物高度敏感的偏振视觉感知与导航功能为生物基础,以太阳光的自然偏振特性为理论依据,通过对大气偏振模式的检测和演算,实现对载体姿态信息的判断,是一种适合于弱/无卫星导航信号的陌生环境下的自主导航方法。这些特点对无人作战平台战场特殊环境下的自主导航与定位有很强的指导意义和重要的应用价值。偏振光导航作为一种以太阳为信息载体的天文导航,在导航方式上具有不易受电磁/人为干扰、全天、全球化的特点[3-5]。这些特点为目前导航技术的研究的提供了一个全新的思路。
总之,相比传统的导航方式而言,偏振光导航系统具有精度高、灵敏度好、集成度高及抗干扰能力强等优点,是提高惯导姿态测量的一种有力补充手段,因此基于大气仿生偏振光的导航系统在导航定位领域有着较大的研究价值和广阔的应用前景。
1 偏振光导航国内外发展历程
偏振光导航作为一种新颖的导航技术,其研究始于人类对某些生物导航行为的探索和钻研。当前,包括美国和俄罗斯在内的多个国家的学者都在对生物的偏振光导航技术进行研究。国外从1949年就开始了对蜜蜂利用偏振光进行导航的研究。自2000年至今,国外的研究取得了一系列科研成果:2000年,Dimitrios.L等[6]受昆虫导航能力的启发,研制出相应的平台,并成功用于移动机器人Sahabot2上;2002年,Vitzthum.H等[7]对蝗虫偏振对立神经元进行研究,首次使得处理偏振光信息成为可能;Wohlgemuth.S等[8]将沙蚁的导航行为扩展到三维空间,对沙蚁上山和下山的行为进行了充分研究;Thomas.L等[9]研究表明蜜蜂和沙蚁均为从天空偏振光分布模式中获取方向信息,但距离的推算过程有区别;2003年,Marie. D等[10]在Nature上报导了首次发现某些动物可以在夜间利用月光偏振进行导航定位;Thomas.W等[11]讨论了水下生物的偏振视觉及其在目标识别和增强对比度以及信号探测等方面的作用;Oren.F等[12]发现蝴蝶依靠生物钟和偏振罗盘的组合导航进行长距离迁徙;2004年,美国航天局提出了可以用于火星探测计划的偏振光辅导组合导航方法,以解决火星重力低和无线电导航应用的限制[13];2005年,Shai.S等[14]对水下偏振光进行了测试并进行了仿真研究;2006年,Rudiger.W和Martin.M[15]通过实验验证了沙蚁主要依靠偏振光导航的基本原理;Rachel.M[16]发现南美大草原的麻雀利用日出和日落时的天空偏振光的分布校正地磁信息;2007年,Ramon.H等[17]讨论了由森林火灾引起的烟雾对偏振光导航的昆虫将会造成很大影响;2008年,Tsyr.H等[18]对头足类动物和口脚类动物中发现的四种偏振器的精细结构和光学特性进行分析和比较,发现它们具有相似的偏振视觉系统,都对450nm~550nm波段的偏振光反应敏感;2010年,Mukul.Sarkar等[19]提出了基于CMOS的偏振成像传感器,能实时测量天空偏振光信息;2011年,Hebib.S等[20]设计了测量多波段的圆偏振闭环电路;2012年,美国陆军研究实验室研发出一种小体积和高精度的传感器原型机供单兵作战和训练使用;2013年,Mukul.Sarkar[21]设计了基于CMOS偏振传感器的偏振导航系统;2014年,德国洪堡州立大学的学者[22]对沙蚁利用偏振光和太阳罗盘的交互作用进行路径积分进行了研究。
虽然国内的相关研究则起步较晚,但是近几年发展迅速。1998年,中科院生物物理所[23]对蚂蚁的行为研究表明,蚂蚁能够利用人工照明作为其捷径返巢导航的参照系统;2005年,中科院上海光机所[24]在技术设计上初步实现了偏振光导航功能;2007年,哈尔滨工业大学[25]提出了偏振光/地磁/ GPS/SINS组合导航方法,从理论上论证了偏振光作为辅助导航的作用和意义;2009年,合肥工业大学[26]对偏振光导航辅助组合导航系统进行了研究,指出系统误差源的分析和误差补偿是后期研究重点;2010年,北京理工大学与北京大学联合对天空偏振光分布模型和天空偏振光定向机理进行了深入研究[27];2011年,大连理工大学开发出一种检测天空偏振光的导航传感器,并进行了移动机器人实验[28],海军潜艇学院提出了一种利用水下散射光的振动方向进行导航的方法[29];2012年,北京大学进行了仿生偏振导航光电测试系统的设计和实现[30];2013年,北京航空航天大学对偏振光组合导航系统进行了一系列研究,将偏振光应用到静基座初始对准,取得了初步研究成果[31-32],东南大学设计了惯性/重力/计程计/偏振光组合导航系统的信息融合方式,增强了系统导航性能[33],中北大学提出了仿生复眼光学偏振传感器及其大气偏振E矢量检测应用,实现了偏振光自主导航[34],大连理工大学提出了一种面向偏振光传感器的无人机导航平台[35],北京航空航天大学设计了一种偏振导航传感器标定系统的设计与实现方法[36],合肥工业大学提出了一种基于沙蚁POL-神经元模型的航向角处理方法[37];2014年,中北大学对基于ZEMAX的仿生DRA复眼阵列进行了仿真和分析,结果表明提出的方法能够有效检测天空偏振分布模式(E-矢量分布模式)[38],国防科技大学以CCD相机,鱼眼相机和线性偏振片为核心器件设计了一种天空偏振光测量装置[5],清华大学提出了基于连续旋转检测器的天空偏振光探测装置[39-40],南昌大学对基于偏振光辅助定向的车辆自主式导航方法进行了研究[41]。

图1 合肥工业大学设计的偏振光传感器Fig.1 The polarization sensors designed by HFUT
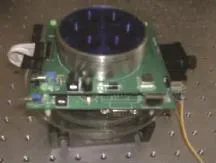
图2 大连理工大学设计6通道偏振光传感器Fig.2 The polarization sensors with 6 channels designed by DLUT

图3 中北大学设计的6通道偏振光传感器Fig.3 The polarization sensors with 6 channels designed by NUC
由偏振光导航技术的国内外发展历程可以看出,国外对仿生偏振光导航研究的起步较早,而近五年国内对仿生偏振光导航技术的研究则发展迅速,取得了一系列成果。可以预见,仿生偏振光导航技术必将在导航领域占据一席之地。
2 偏振光导航技术
2.1 大气偏振光
太阳光经地球中遇到大气中粒子时,会产生散射现象,散射现象会在光波的所有频谱段发生,并且会改变光的偏振状态。大气粒子主要由气体分子组成,瑞利散射描述为大气偏振模式,是地球的自然属性之一,图4为大气中光的偏振模型。大气偏振模式中包含有重要的方向信息,其偏振度、偏振方向等参数信息随着太阳位置、地理位置、大气环境、天气状况以及地面环境的改变而产生相应的变化,偏振光是一种矢量方向不变,大小随相位变化的光,大气偏振光为偏振光与自然光的叠加体,称为部分偏振光。
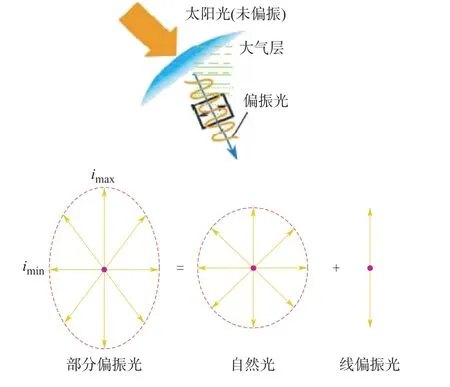
图4 大气偏振光的形成Fig.4 The formation of atmosphere polarization
瑞利散射模型与大气偏振模型具有很好的相似度,可以利用瑞利模型来对实际的大气偏振态进行分析,图5为某一时刻基于瑞利散射的大气偏振态的三维分布,其中双箭头表示E矢量方向,数字表示该同心圆上的偏振度,从图中可以看出偏振度以天顶为轴心对称分布,随着距离太阳角度的增加而升高,在距离太阳90°的位置达到最大值,再朝着反太阳位置时不断减少,E矢量关于当地太阳子午线呈现逆对称分布,根据瑞利散射模型,某观测点上的偏振信息在时间、地点、观测方向的共同作用下,具有唯一性。因此可以通过检测头顶区域的偏振信息,结合偏振态分布的稳定对称性,求解出对称线—太阳子午线的位置,并且太阳子午线的位置在地理坐标系中的方位是精确可知的。由于偏振矢量在强度和方向随着与太阳子午线的夹角变化而发生变化,具有唯一性,这样就可以准确的反演出观测方向在地理坐标中的方位,为导航提供航向信息。

图5 大气偏振态的三维分布Fig.5 3D distribution of atmosphere polarization
2.2 偏振光导航机理
由大气的偏振模式可知,观测者所观测到的区域中的偏振信息,与观测者所在位置、观测方向、太阳位置以及大气环境密切相关。在天球坐标系中,由观测者O点的经纬度、观测日期以及观测时刻,能够获得当前时刻太阳高度角hs和太阳方位角,有:

其中δ为太阳赤纬角、β为观测点O点的纬度、t为太阳时角。对于选定的时间可以计算出此时本地子午线的时角,对于选定的地点,即地理的经度纬度已知。通过时间、地点可以唯一确定太阳子午线在该地地理坐标中的投影方位,同时天空偏振E矢量的分布是以该时刻、该地点的太阳子午线为对称分布的。可通过对天空偏振信息进行检测,解算出太阳子午线与运动载体所成的夹角,再结合在具体时刻、具体地点已知的情况下太阳方位角在地理坐标中的确定性,运动载体与太阳子午线所成的夹角即可转化为运动载体在地理坐标中的方位角。
2.3 惯性/偏振光组合导航技术
仿生偏振光/惯性组合导航系统基本原理就是借助于上述分系统的导航机理将把来自于仿生偏振光阵列传感器和惯性导航加速度传感器、陀螺仪测量的姿态与定位数据有机的融合起来,利用不同导航系统测量值的互补特性提取各子系统误差并进行校正补偿,以提高整个导航系统的性能的方法。其核心问题就是软硬件平台的搭建和导航系统误差的估计和补偿,如图6所示。
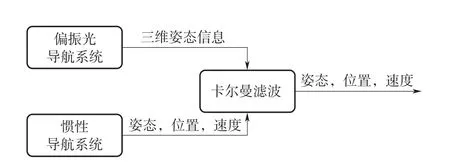
图6 偏振光传感器和惯导组合导航原理图Fig.6 The flowchart of polarization sensors/inertial integrated navigation
在整个系统构成中,惯性导航完成三维测姿、定位的重要功能,仿生偏振光导航起到辅助定姿、定位,修正惯导积累误差,发挥优势互补的重要作用。在原理上讲,惯性传感器利用力学基本原理由加速度计测量载体的加速度,并在给定运动初始条件下,由导航计算机计算出载体的速度、距离和位置(或经纬度);由陀螺仪测量载体的角运动,并经转换、处理、输出载体的姿态和航向。而仿生偏振光阵列传感器可以全天候、强地磁干扰的情况下很好的工作,通过检测大气偏振模式实时获得载体运动姿态角信息,没有误差累积;并利用偏振光阵列传感器不同观测点大气偏振模式空间显著特征的变化,基于感器阵列的空间位置几何关系,就可以计算出目标位置地点,实现偏振光导航的定位,这恰恰是GPS以及惯性导航获取姿态信息及位置信息所不具备的。并结合卡尔曼滤波技术将二者的数据进行融合处理,实现整个导航系统的高精度、高可靠性目标。
3 大气仿生偏振光导航技术需解决的关键问题
3.1 大气偏振模式及其分布理论研究
很多动物能够利用天空中相对稳定的偏振模式图确定参考方向及自己的航向信息,那么,如果感知大气偏振光模式及分布和在不同天气条件下有效利用大气偏振光信息确定当前航向便成为偏振光导航技术需解决的关键问题。
3.2 仿生模型的提取及传感器设计
利用传感器对大气偏振光进行有效探测,是利用偏振光信息进行导航的重点也是难点。
3.3 传感器及导航系统设计
设计并实现高精度的偏振光导航传感器,是实现偏振光导航的目标之一。偏振光导航传感器的设计包括光电接收模块,信号处理模块,数据采集模块和角度计算模块的设计和实现。其中,光电接收模块设计的好坏直接影响导航试验平台的适用性和精度,因此高精度偏振光传感器的设计是利用大气偏振光进行导航应用的前提。
3.4 传感器的三维姿态测试技术研究
传统偏振光导航技术只能提供二维航向信息,如何利用偏振光传感器实现载体的三维姿态测量,是偏振光导航技术实际应用需解决的关键问题。
3.5 偏振光/惯导组合导航系统研究
偏振光辅助惯性的组合导航系统中存在着各种类型和特性的干扰,必须对这些干扰进行有效处理,才能提高组合系统的导航精度和可靠性。在确定的硬件环境中,从软件和算法的角度研究各类多源系统抗干扰滤波方法,是提高惯性/偏振光组合导航系统精度及可靠性的一种有效方法。因此,建立高精度的组合导航模型并设计有效的多级容错滤波算法是实现惯性/偏振光组合导航系统的高精度和高可靠性的关键技术。
4 结论
偏振光导航是一种基于自然特性的新型仿生导航方式,其与惯性导航系统进行组合,对解决陌生环境下的自主导航与定位的科学问题具有重大指导意义。但是在偏振光导航的实际应用中,还存在一些关键技术问题需要解决,如大气偏振模式及其分布,大气偏振光信息的有效检测方法,偏振光导航传感器及系统的设计,偏振光三维姿态测量和惯性/偏振光组合导航系统等。解决上述关键技术问题,实现自主性强,隐蔽性好的偏振光导航系统并与惯性导航系统进行组合,必将成为自主导航领域的研究热点。
[1]陈家斌,关桂霞,李磊磊.偏振光导航[J].导航与控制,2014,13(1):57-64.
[2]关桂霞,晏磊,陈家斌,等.天空偏振光分布的实验研究[J].兵工学报,2011,32(4):459-463.
[3]褚金奎,林林,陈文静,等.基于MSP430的仿生偏振光导航传感器的设计与实现[J].传感器与微系统,2012, 31(8):107-115.
[4]江云秋,高晓颖,蒋澎龙.基于偏振光的导航技术研究[J].现代防御技术,2011,39(3):67-70.
[5]Yujie Wang,Xiaoping Hu,Junxiang Lian,et al.Design of a device for sky light polarization measurements[J]. Sensors,2014,14(8):14916-14931.
[6]Dimitrios Lambrinos,Ralf Moller,Thomas Labhart,et al.A mobile robot employing insect strategies for navigation[J].Robotics and Autonomous Systems,2000,30 (1-2):39-64.
[7]Vitzthum H,Muller M,Hombeg U.Neurons of the central complex of the locust Schistocerca gregaria are sen sitive to polarized light[J].The Journal of Neuroscience,2002,22(3):1114-1125.
[8]Wohlgemuth S,Ronacher B,Wehner R.Distance estimation in the third dimension in desert ants[J].Journal of Comparative PhysiologyA,2004,190(1):1-6.
[9]Thomas L,Eric M.Neural mechanisms in insect navigation:polarization compass and odometer[J].Current Opinion in neurobiology,2002,12(6):707-714.
[10]Marie D,Dan-Eric N,Clarke H,et al.Animal behavior: Insect orientation to polarized moonlight[J].Nature,2003,33(424):24-33.
[11]Thomas W C,Nadav S,Roy L C,et al.Polarization vision and its role in biological signaling[J].Integrative and Comparative Biology,2003,43(4):549-558.
[12]Oren F,Anthony L,Gotter,et al.Illuminating the circa dian clock in monarch butterfly migration[J].Science,2003,300(5623):1303-1305.
[13]Thakoor S,Morookian J M,et al.Bees:exploring mars with bioinspired technologies[J].Computer,2004,37 (9):38-47.
[14]Shai Sabbah,Amit L,Carynelisa E,Nadav S.Under water polarization vision-Aphysical examination[J]. Tran sworld Research Network,2005,1:1-54.
[15]Rudiger W,Martin M.The significance of direct sunlight and polarized skylight in the ant's celestial system of navigation[J].PNAS,2006,103(33):12575-12579.
[16]Rachel M.Polarized light cues underlie compass calibration in migratory songbirds[J].Science,2006,313: 837-839.
[17]Ramon H,Susanne A,Gabor H.Anomalous celestial polarization caused by forest fire smoke:why do some in sects become visually disoriented under smoky skies?[J].Applied Optics,2007,46(14):2717-2726.
[18]Tsyr-Huei C,Roy L C,Roger T H,et al.Fine structure and optical properties of biological polarizers in crusta ceans and cephalopods[C]//.Proc.of SPIE,2008,6972: 69720301-10.
[19]Mukul S,et al.Integrated polarization analyzing CMOS image sensor for autonomous navigation using polarized light[C]//.IEEE International Conference,2010,224-229.
[20]Hebib S,Aubert H.Triband antenna feeding circuit for circular polarization diversity[C]//.Microwave Conference,2011,890-893.
[21]Mukul S,Albert T.Navigation using CMOS polarization sensor[C]//.A Biologically Inspired CMOS Image Sensor,2013,461:185-214.
[22]Lebhardt F,Ronacher B.Interactions of the polarization and the sun compass in path integration of desertants,A-Neuroethology Sensory Neural and Behavioral Physi ology[J].Journal of Comparative Physiology,2014,200(8):711-720.
[23]Shen JX,Zhi MX.Direct homing behavior in the ant tetramorium caespitum(Formicidae Myrmicinae)[J]. Animal Behavior,1998,55(8):1443-1450.
[24]李代林,王向朝.高精度偏振光导航仪[P].中国专利.公开号:CN2849660,2005.
[25]卢鸿谦,尹航,黄显林.偏振光/地磁/GPS/SINS组合导航方法[J].宇航学报,2007,28(4):132-137.
[26]范之国,高隽,等.仿沙蚁POL神经元的偏振信息监测方法的研究[J].仪器仪表学报,2008,29(4):745-749.
[27]Chu JK,Zhao KC,et al.Construction and performance test of a novel polarization sensor for navigation[J].Sen sors andActuators:A,2008,148:75-82.
[28]储金奎,陈文静,等.基于偏振光传感器的移动机器人导航实验[J].光学精密工程,2011,19(10):2419-2426.
[29]王光辉,刘晓亮,等.水下偏振光导航技术[J].舰船科学技术,2011,33(7):79-82.
[30]Gao FM,et al.Design and implementation of photoelectricity test system for bionic polarization navigation [J].Optics and Precision Engineering,2012,20(10): 2237-2244.
[31]郭雷,杜涛,等.一种基于偏振信息的组合导航系统递推优化初始对准方法[P].中国专利:201310069529.4,2013.
[32]郭雷,杨健,等.一种基于SINS/GPS/偏振光组合导航系统多目标优化抗干扰滤波方法[P].中国专利:201310069515.2,2013.
[33]祝燕华,蔡体菁,李春,等.天空偏振光辅助的组合导航方法[J].中国惯性技术学报,2012,20(6):674-677.
[34]丁宇凯,唐军,王飞,等.仿生复眼光学偏振传感器及其大气偏振E矢量检测应用[J].传感技术学报,2013,26(12):1644-1648.
[35]刘辉邦.面向偏振光传感器的无人机导航平台开发[D].大连理工大学,硕士学位论文,2013.
[36]李成贵,孙燕峰,魏鹏.偏振导航传感器标定系统的设计与实现[J].电光与控制,2013,20(12):60-63.
[37]王波,高隽,范之国,等.基于沙蚁POL-神经元模型的航向角处理方法[J].光电工程,2013,40(10):28-34.
[38]曹卫达,唐军,王晨光,等.基于ZEMAX的仿生DRA复眼阵列的仿真与分析[J].光纤工程,2014,41(5):83-88.
[39]卢皓,赵开春,马强,尤政.采用连续旋转检偏器的天空偏振光探测装置设置与实现[J].宇航学报,2014,35(9):1087-1094.
[40]马强,赵开春,尤政.偏振光栅导航传感器电子系统设计[J].传感器与微系统,2014,33(1):97-104.
[41]王吉旭,熊剑,郭杭,等.基于偏振光辅助定向的车辆自主式导航方法研究[J].计算机工程与应用,2014.
Atmospheric Polarization Navigation Technology
LIU Jun,TANG Jun,SHEN Chong
(National Key Laboratory for Electronic Measurement Technology,Key Laboratory of Instrumentation Science&Dynamic Measurement,Ministry of Education,School of Instrument and Electronics,North University of China,Taiyuan 030051,China)
In order to overcome the current disadvantages of navigation technologies in the battlefield applications nowadays,developing other novel navigation methods especially bio-optical navigation methods is one of the important development trends.In this paper,the insect optical navigation mechanism is introduced and analyzed,and the development trends of atmospheric polarization navigation technology are discussed.Finally,the key problems during the development process of atmospheric polarization navigation technology are proposed.
Bionic technology;Atmospheric polarization;Polarization navigation;Inertial/polarization integrated navigation
U666.1
A
2095-8110(2015)02-0001-06
2014-12-05;
2015-01-07。
国家杰出青年基金(2012CB723404);国家自然科学基金(91123016,61171056)
刘俊(1968-),男,教授,博士生导师,主要从事微纳惯性器件方面的研究。E-mail:liuj@nuc.edu.cn
