重力测量技术与惯性技术之间的关系
2015-04-19胡平华苗成义陈晓华詹双豪
黄 鹤,胡平华,苗成义,陈晓华,詹双豪
(北京自动化控制设备研究所,北京100074)
重力测量技术与惯性技术之间的关系
黄 鹤,胡平华,苗成义,陈晓华,詹双豪
(北京自动化控制设备研究所,北京100074)
以加速度计为代表的惯性器件技术和以惯性稳定平台为代表的惯性系统技术,极大地推动了重力仪和重力梯度仪的发展。重力测量技术的不断进步,也有效支撑惯性导航系统性能的不断提升,并牵引了惯性技术研究的不断深入。国内惯性技术领域应将重力测量仪器研制作为一项长期而重要的主题,研制过程中应充分发掘现有技术潜力加快研制进度,并注重产品小型化和轻量化设计,推进重力/重力梯度测量技术协同发展,不断提高技术水平,拓展产品应用领域,推进惯性技术的可持续发展。
加速度计;惯性平台;重力仪;重力梯度仪;惯性导航系统
0 引言
地球重力场数据是国家的重要战略资源,在国防军事技术、空间技术、资源勘探、地球物理研究以及大地测量等领域具有十分重要的作用。由于重力场的变化非常细微,且受到很多因素的影响,因此对于重力仪和重力梯度仪等测量仪器的要求非常高,目前仅有少数国家能够掌握其设计制造技术。惯性技术作为一项涉及多学科且应用广泛的专业技术,其多项基础技术的应用对于重力测量仪器的发展起到了重要的推动作用。而重力测量技术的不断进步反过来也支撑和牵引惯性导航技术的发展和提升,为惯性技术的进一步发展带来新的机遇与挑战。
1 惯性技术对于重力测量仪器发展的推动作用
1.1 惯性技术对重力仪发展的推动作用
陆用重力仪难以满足大面积地球重力普查工作的需要,不仅速度不能满足要求,更难以在广阔的水域和人迹罕至的陆地使用,因此需要船载和机载的移动平台重力仪。研制移动平台重力仪的最直接方法就是对以零长弹簧为传感器的陆用相对重力仪进行改进研制,采用的主要技术措施除了改进传感器减小垂直加速度影响以及引入布朗校正、交叉耦合校正和厄缶校正等误差校正算法外,最重要的就是增加稳定平台隔离载体运动的影响。最初的移动平台重力仪采用两轴阻尼稳定平台,平台上加速度计和陀螺的输出信息通过两轴反馈回路使平台保持水平,显著削弱了水平加速度对测量结果的影响。这类产品中得到广泛使用的以美国生产的LCR系列海空重力仪和德国生产的KSS系列海洋重力仪为主,精度约为1mGal。其成功的关键主要是采用了陀螺仪和加速度计为核心的稳定平台,这可以说是惯性技术在重力仪发展历程中的第一次重要应用。
飞机航速比船只快很多,各种扰动加速度的影响就比海上测量大得多,因此高精度航空重力仪的研制难度比海洋重力仪困难很多。随着载波相位差分GPS的出现有效解决了垂向加速度计校正的问题后,平台的稳定性成为航空重力测量系统的精度和分辨率进一步提高的主要障碍。由于采用两轴阻尼稳定方式并不能完全消除水平加速度对重力敏感器输出结果的影响,因此国际上进一步采用三轴惯性稳定平台,研制了新型的、精度更高的航空重力仪。与平台惯导系统类似,这种重力仪稳定平台工作在舒拉调谐状态,从理论上能够完全消除水平加速度对于垂向加速度计测量结果的影响。这类产品是目前得到实际使用的航空重力仪中技术最先进、精度最高的。其中最为成功的为加拿大SGL公司的AIRGrav航空惯性基准重力仪(见图1)和俄罗斯莫斯科重力测量技术公司的GT-1A/2A航空重力仪。GT-1A/2A的精度达到了0.6mGal/2.2~4km(固定翼飞机),而AIRGrav更是达到了优于0.2mGal/2.2~4km和0.2mGal/0.7~1.1km(直升机)的水平。
AIRGrav除了采用三轴惯性稳定平台外,还有一个显著特点是其重力敏感器没有采用传统的弹簧机构,而是使用了霍尼韦尔的石英挠性加速度计QA3000,其零偏和标度因数年重复性分别为40µg和8.0×10-5,属于导航级惯性器件,通过采用高精密温控等技术措施使其能够满足精度优于1mGal重力仪的使用需求。重力敏感器是重力仪的核心,传统重力敏感器采用零长弹簧原理,漂移小、精度高,但是工作范围小,交叉耦合效应大,易受外界载体运动干扰,同时体积和重量偏大,一定程度上制约了其在运动载体上的应用。采用加速度计作为重力敏感器,则能很好的克服这一系列问题,不仅工作范围大、交叉耦合误差小,而且体积小、重量轻,为新一代高精度航空重力仪的发展创造了更为有利的条件。
随着惯性技术的发展,近十年来国际上以新型光学陀螺捷联惯导和高精度加速度计技术为基础,开展了数学平台重力仪的研制。其中具有代表性的是加拿大的SISG系统和德国的SAGS系统,同时俄罗斯也在抓紧研制名为GT-X的捷联式航空重力仪系统(见图2)。在多家研究机构于2000年组织的航空重力测量飞行试验中,SISG的内符合精度达到了1.5mGal、分辨率为2km。

图1 加拿大SGL公司的AIRGrav重力仪Fig.1 AIRGrav(Airborne Inertially Referenced Gravimeter)manufactured by Sander Geophysics Limited(SGL)of Canada
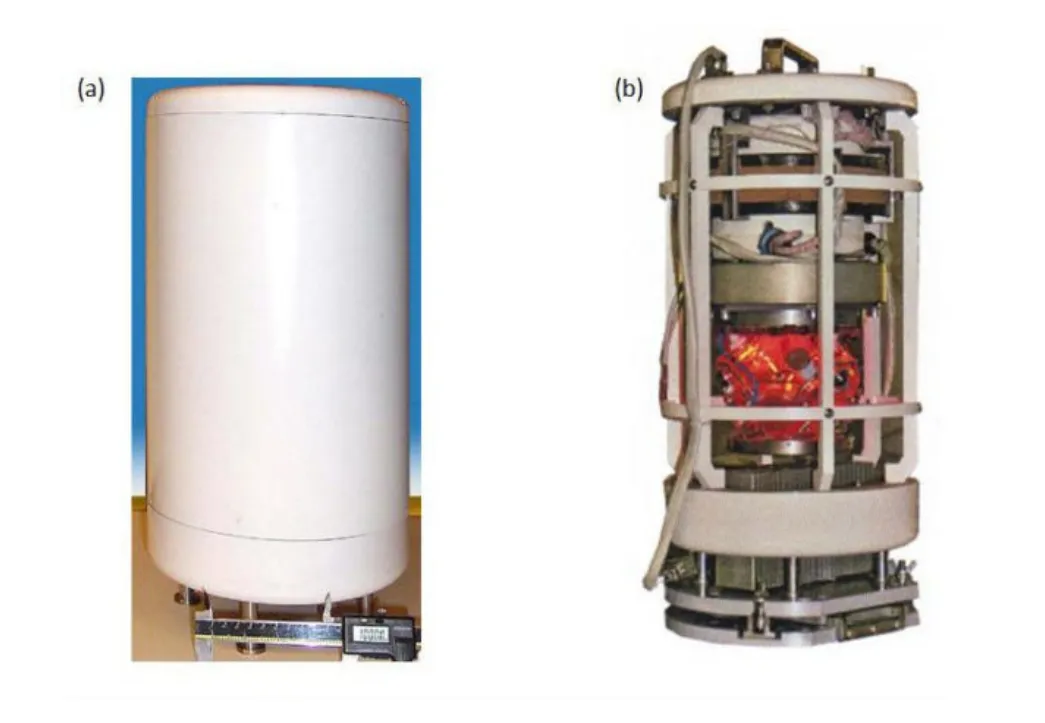
图2 俄罗斯GT-X捷联式航空重力仪系统Fig.2 GT-X StrapdownAirborne Gravimetry System of Russia
高精度加速度计技术、平台惯导技术和捷联惯导技术等惯性技术在重力测量仪器中的应用,不仅提高了对重力扰动的垂直分量的测量精度和效率,而且还可以测量重力扰动的水平分量,从而为将重力仪从传统的重力标量测量仪器发展到重力矢量测量仪器提供了技术基础。目前国外光学捷联重力仪对重力扰动水平分量测量的精度约为7mGal~8mGal(相当于垂线偏差1.5"左右),而AIRGrav重力仪测量重力扰动水平分的精度则具备了优于0.5mGal(相当于垂线偏差0.1")的能力。
1.2 惯性技术对重力梯度仪发展的推动作用
重力梯度仪主要用于测量重力梯度张量。20世纪70年代,为了满足高精度导航和导弹发射的需要,美国军方投资数十亿美元研发动态重力梯度仪,产生了休斯敦航天飞机、Draper实验室和贝尔宇航Textron(现属于洛克希德-马丁公司)三家机构的三种梯度仪进行竞争的“决赛”计划。“决赛”的胜利者是贝尔的旋转加速度计重力梯度仪。贝尔重力梯度仪最初主要用于辅助美国海军核潜艇的隐蔽自主导航,1982年完成了第一台海洋重力梯度仪交付,一度为美国国防秘密。冷战结束后,这项军事技术得到解密并开始用于地质勘探及地球物理研究等领域,并研制成功世界上第一种投入实际使用的航空重力梯度仪。促成此项重力梯度仪研发计划的主要动力在于克服惯导自身缺点、提升惯导性能以满足高精度军用自主导航需求,因此可以说是惯性技术发展的需求牵引了重力梯度测量技术的复兴。
此后,重力梯度仪取得了较快的发展,目前正在研制的重力梯度仪多达20余种。其中,静电重力梯度仪(见图3)是继贝尔旋转加速度计重力梯度仪之后第二种获得实用的动态重力梯度仪,应用于欧洲宇航局(ESA)2009年发射的重力场和静态洋流探索卫星(GOCE)。目前国际上重力梯度仪研究主要集中在三个方向,一是进一步提高旋转加速度计重力梯度仪的精度,满足近期对于重力梯度测量的应用需求;二是研制应用超导技术的重力梯度仪,这一方案极有可能成为下一代重力梯度仪的主方案;三是着眼于未来,研究原子干涉重力梯度仪等采用物理学前沿技术的新型重力梯度仪。

图3 法国ONERA研制的一种静电加速度计重力梯度仪Fig.3 Akind of Electrostatic SupportAccelerometer Gravity Gradiometer manufactured by ONERAof France
上述重力梯度仪的研制过程中,始终面临着两个关键的问题:稳定平台性能和加速度计精度。这两个是惯性技术研究面临的基础问题。惯性技术对此两方面开展的大量研究和实践,对于重力梯度仪的研制发挥了很好的支撑和推动作用。
从原理上讲,重力梯度测量相较于重力测量具有抗载体运动干扰能力强的特点,但是重力梯度测量的精度要求极高,重力信息必须在1010~1011倍甚至更大的加速度中提取出来,拥有高精度稳定平台仍然是非常重要的。旋转加速度计重力梯度仪方案需要高精度稳定平台隔离外界干扰。美国贝尔宇航公司研制的Air-FTG全张量重力梯度测量系统采用了三框架的当地指北水平稳定平台,为安装在其上的三套重力梯度敏感器提供良好的测量环境。超导重力梯度仪(SGG)同样也需要解决高性能稳定平台研制问题。美国Sandia国家重点试验室的地质构造勘探SGG、Maryland大学的ModleⅡ-SGG和ModeⅢ-SGG、英国QXford公司的空间SGG在研制过程中均投入了很大的精力以提高稳定平台的性能。而ARKeX公司的EGG勘探型重力梯度仪、加拿大Gedex公司的HD-AGG系统以及必和必拓与西澳大学合作研制的VK1系统甚至因为稳定平台性能没能达到预期要求而延迟了研制进度。采用物理学最新前沿技术的原子干涉型重力梯度仪同样采用稳定平台作为支撑。美国斯坦福大学、美国JPL实验室和西澳大利亚大学等研制的原子干涉型重力梯度仪均使用了稳定平台以隔离外界干扰对重力梯度仪的影响。可见作为惯性基础技术之一的稳定平台技术,对于重力梯度仪的研发起到了十分重要的支撑作用。
加速度计对于重力梯度仪性能的影响则更为直接,因此利用惯性技术最新研究成果,不断改进加速度计性能和研制新型加速度计一直是推动重力梯度仪发展的主要方式。贝尔旋转加速度计式重力梯度仪采用ModelⅦ力平衡式加速度计。欧空局GOCE卫星的静电重力梯度仪上安装了三组对称安装的伺服控制静电加速度计,其分辨率达到2×10-12(m/s2)/Hz1/2。超导重力梯度仪是国际研究热点,美国、英国、澳大利亚、意大利等国均有机构致力于该项技术研究,这种重力梯度仪的核心为超导加速度计。超导航空重力仪已经有了重大突破,ARKeX公司设计的EGG重力梯度仪和Gedex公司的HD-AGG系统已经研制成功,声明性能优于1E/Hz1/2。原子干涉重力梯度仪是一种极具发展潜力的前沿技术,原子干涉加速度计实质上是用原子代替了惯性质量,利用相干原子和激光的相互作用精确测量原子的轨迹从而得到加速度。美国AOSense公司研制的原子干涉加速度计分辨率达到6×10-12g,基于此技术研制的重力梯度仪(见图4)在美国核潜艇的水下重力梯度匹配导航中已经获得应用。
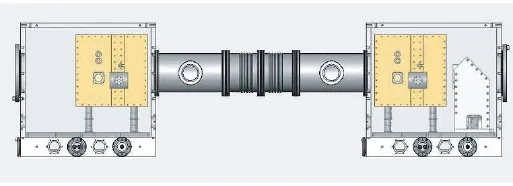
图4 美国AOSense公司的原子干涉重力梯度仪结构图Fig.4 Configuration of theAtom Interferometric Gravity Gradiometer manufactured byAOSense of USA
2 重力测量技术的提升对于惯性技术发展的支撑和牵引作用
惯性器件和系统技术的应用,对重力测量仪器发展起到了强有力的推动作用,而重力测量技术的提升反过来又对惯性技术的发展起到了重要的支撑和牵引作用。
2.1 重力测量技术的提升对于高精度惯性导航技术发展的支撑作用
随着技术的发展,惯性器件和系统精度不断提高,使得重力场误差对于惯性导航精度的影响显得越来越显著,因此进一步提高惯性导航系统的精度将主要取决于重力场模型精度及重力场补偿精度。利用重力信息,可以从三方面支撑惯性导航技术的提升。
1)高精度的地球重力场数据可以提高惯导系统重力加速度的补偿精度
惯性系统一般使用正常重力模型解算重力加速度。但实际上由于重力异常的存在,将会给系统水平方向带来10-5g量级的等效惯性加速度误差,其影响对于高精度惯性导航是不可忽略的。研究表明,忽略重力扰动可引起远程导弹的落点偏差最大达到2km,中程导弹的落点偏差最大可达1km。如果用高精度的地球重力场数据替代正常重力模型,则可显著减小由重力加速度模型补偿带来的误差,提高惯性导航系统精度。远程导航需要大范围高精度地球重力场模型,美国空军试验室的研究表明,下一代高精度惯导系统要达到纯惯性5m/h的定位精度,这就要求重力扰动的水平分量精度达到0.5mGal左右(相当于垂向偏差0.1″)。
2)高精度的地球重力场数据可以提高惯导系统初始化精度
远程武器在使用前,需要对制导系统进行初始化,其中就需要精确的重力场数据。为了提高武器制导系统的精度,通常要对惯导系统的关键参数,如加速度计零偏和标度因数等,进行野外标定或者射前自标定。为了提高标定精度,就需要知道当地精确的重力加速度信息。此外,远程导弹的高精度初始对准,也必须知道当地精确的重力垂向偏差,才能使导航系统精确地对准到要求的导航坐标系中。
3)高精度的地球重力场数据可以抑制惯导系统误差随时间的积累
重力匹配导航通过重力测量仪器实时测量重力特征数据,同时根据惯导位置从事先绘制的重力图中读取重力数据,利用这两种数据求得载体最佳匹配位置,再据此信息通过组合导航修正和限定惯性导航误差,从而实现长航时高精度自主导航。利用重力测量仪器实时获取重力信息、地球重力图绘制与调查、重力信息匹配算法是重力匹配导航需要解决的三个主要问题,其中前两项都与重力测量技术密切相关。
2.2 重力测量仪器研制对于惯性技术的牵引作用
由于非常精密和复杂,重力仪和重力梯度仪研制工作的技术难度很大,因此对于采用的相关技术提出了更高的要求,从而对惯性技术领域起到了有效的牵引作用。
(1)高精度加速度计技术
目前加速度计的水平满足重力仪应用需求难度不是很大,如加拿大AIRGrav重力仪通过采用优于0.01℃高精度温控等措施,使得QA3000导航级石英挠性加速度计达到了优于10-6g的水平,从而满足重力测量的需求。
对于重力梯度仪而言,由于需要在重力加速度和载体加速度上探测相距10cm两点间10-11g量级的加速度,对加速度计的性能要求非常高。此外,旋转加速度计重力梯度仪采用的力平衡加速度计需要进一步减小热噪声和二阶误差系数,还需要进一步减小体积和重量。超导加速度计预期精度很高,但由于常温超导技术尚不成熟,需要在接近绝对零度的低温下工作,因此实际使用时需要研究先进的制冷设备,并减小其体积重量。在目前的技术水平下,原子干涉型重力仪的体积庞大,也制约了其实际应用。这些都是与惯性技术直接相关的需要研究解决的技术难题。
(2)稳定平台技术
陀螺稳定平台技术的采用,在历史上为动态重力测量仪器的研制成功起到了重要的促进作用。而对于重力梯度仪,稳定平台技术依然非常重要,因此需要继续研究提高稳定平台技术。稳定平台的主要作用是为重力敏感器和重力梯度敏感器提供合适的测量环境,因此对其要求应不仅局限于保证指向精度和稳定性,还必须要求控制好内部的温度、振动、电磁等各种环境因素。
值得注意的是,由于载体运动使得平台框架转动,从而导致惯性器件周边温度、振动、电磁等环境发生变化,进而通过器件本身的温度敏感特性、振动敏感特性、电磁敏感特性等引起其敏感器输出变化,即产生所谓的壳体效应。这种误差在高精度平台惯导中是很重要的一个误差源,对于精度要求更高的重力测量仪器而言,这种影响可能会更显著,因此必须结合重力测量敏感器和系统的特点,开展系统深入细致的研究,在硬件上尽量减小其影响幅值,同时从软件上能够予以更高精度的标定和补偿。
(3)标定测试技术
重力仪和重力梯度仪对于惯性器件和数据处理的精度要求远高于一般的惯导系统,使用方式也不尽相同,如何对其性能进行测试和评价是需要深入研究的问题。
重力仪和重力梯度仪是非常精密的仪器,任何微小的安装误差都可能对其性能造成严重的影响,因此需要针对平台安装定位误差、加速度计安装误差、加速度计径向安装误差等各种安装误差,从两方面开展工作以减小其影响:一是研究产品装配中的标定检测和精确调整方法,从而尽量减小安装误差幅值。二是研究系统级标定测试方法,以便产品装配完成后进行有效补偿。
采用自标定技术提高关键解算参数的准确性,并通过前校后校测量消除影响较大的一次通电趋势项,可以进一步提高系统的性能。但是重力测量仪器与惯导系统构造有较大区别,且精度要求更高,如何在机载或舰载晃动基座下完成高精度的自标定和自对准也是一项非常具有挑战性的工作。
3 未来发展方向分析及建议
针对国际上重力测量仪器的发展趋势,结合国内现有技术基础以及惯性技术发展的需求,对于国内开展重力仪和重力梯度仪的研制提出以下建议:
1)充分发掘现有技术潜力加快重力测量仪器研制。
重力仪方面,国内惯性器件和系统技术水平已可以有效支撑高精度重力仪的研制。综合考虑预期精度、产品成本和研发周期等各方面因素,国内若期望在短期内获得工程实用的高性能重力仪,采用类似加拿大AIRGrav重力仪“惯性稳定平台+导航级加速度计重力敏感器”的方案是比较理想的选择。同时,由于近年来捷联系统的迅速发展,采用光学陀螺的捷联重力仪也应该重点研究。
重力梯度仪方面,国内与国外差距很大,以目前的技术基础,近期仍应以经典的旋转加速度计方案为突破口,深入开展实质性的研究工作。一方面可以尽快打破国外技术封锁,解决国内各领域应用急需;另一方面为未来研制新一代重力梯度仪积累经验。目前,国外静电重力梯度仪、超导重力梯度仪、原子干涉重力梯度仪等新型产品已获得突破,国内应加强技术跟踪以及对国内相关基础器件研制的技术牵引,特别要加强对于国内原子干涉型惯性器件研制的牵引。
2)重力测量仪器研制应注重小型化和轻量化。
航空重力是实现全球重力测量的主要方法,出于降低成本、确保人员安全以及提高效率等方面的考虑,未来采用小型低成本无人机代替有人飞机进行重力测量将是一种趋势。同时,为了进一步提高经济性,未来重力测量、地磁测量等地球信息测量将实现同步进行,因此需要在本已有限的空间和重量条件下安装多种仪器设备。为满足上述发展趋势,重力测量仪器的研制必须重视小型化和轻量化。
3)推进重力/重力梯度测量技术协同发展。
重力梯度异常能够反映场源体的细节,即具有比重力测量更高的分辨率,因此重力梯度测量具有更广的应用前景,但并不意味着就可完全替代重力测量。重力梯度仪一般用于大比例尺的重力测量,能够给出地球重力场优良的高频信息,而重力仪可用于小比例尺的重力测量,因此能提供地球重力场低频部分的信息。将二者结合,再经过适当的滤波和集成,就能够提供精确的广谱重力描述。重力梯度仪和重力仪的作用是相互补充的,不仅在地球重力场调查如此,在重力辅助导航需要实时测量的场合也如此。美国潜艇重力辅助导航系统中使用的重力测量模块就包含了一个重力仪和三个重力梯度仪,前者测量实际重力偏离正常重力的大小,后者测量重力在三维空间变化的速率。因此,国内进行重力测量仪器研制时应该将重力仪和重力梯度仪的研制工作并重,根据使用需求统筹好两者间的相互关系。
[1]熊盛青,周锡华,郭志宏,周坚鑫等编著.航空重力勘探理论方法及应用[M].北京:地质出版社,2010.
[2]孙中苗,翟振和,李迎春.航空重力仪发展现状和趋势[J].地球物理学进展,2013,28(1).
[3]王静波,熊盛青,周锡华,郭志宏.航空重力测量系统研究进展[J].物探与化探,2009,33(4).
[4]朱如意,丁祝顺,夏刚.航空重力仪/梯度仪惯性稳定平台研制现状[J].导航与控制,2011,10(2).
[5]涂良成,李祝,伍文杰,王志伟,周泽兵.航空重力与重力梯度测量对惯性稳定平台的需求分析[J].中国惯性技术学报,2012,20(1).
[6]卢鑫,练军想,吴美平.高精度舰载惯性导航系统的重力影响研究[J].导航与控制,2010,9(4).
[7]赵风鸣.重力梯度辅助导航定位技术研究[D].哈尔滨:哈尔滨工程大学,2010.
[8]李姗姗.水下重力辅助惯性导航的理论与方法研究[D].郑州:解放军信息工程大学,2010.
[9]彭富清.海洋重力辅助导航方法及应用[D].郑州:解放军信息工程大学,2009.
[10]AA Krasnov,AA Odintsov,I V Semenov.Gyro Stabilization System of a Gravimeter[J].Gyroscopy and Navigation,2010,1(3).
[11]Dave Brown,Lorraine Mause,Brenton Young,Mark Kasevich,Hugh F Rice,P E,Vincent Benischek.Atom Interferometric Gravity Sensor System[C]//.IEEE,2012.
[12]Office of the Under Secretary of Defense,Acquisition, Technology and Logistics.Section16:Positioning,Navigation and Time Technology.Department of Defense De veloping Sciencs&Technologies,January 2006.
Relationship Between Gravimetry Technology and Inertial Technology
HUANG He,HU Ping-hua,MIAO Cheng-yi,CHEN Xiao-hua,ZHAN Shuang-hao
(BeijingAutomatic Control and Equipment Institute,Beijing 100074,China)
The development of gravimeter and gravity gradiometer is promoted by inertial sensor technology represented by accelerometer and inertial systerm technology represented by inertial platform.And the progress of gravimetry technology provides support for the study of inertial technology.Research on gravimetry instrument is one of the most important missions for us,in order to realize the sustained development of inertial technology,we should focus on the latent capacity of the existing technology,the miniaturization and lightweight design for products,coordination of gravimeter and gravity gradiometer.
Accelerometer;Inertial platform;Gravimeter;Gravity gradiometer;Inertial navigation system
U666.1
A
2095-8110(2015)02-0067-06
2014-12-29;
2015-01-20。
航天科工集团重大自主创新项目(2012-J-4)
黄鹤(1978-)高级工程师,硕士,主要从事惯性系统设计和应用方面的研究。E-mail:hh3978@126.com
