捷联式移动平台重力仪地面测试结果
2015-04-19李东明薛正兵王文晶
李东明,郭 刚,薛正兵,王文晶
(北京航天控制仪器研究所,北京100039)
捷联式移动平台重力仪地面测试结果
李东明,郭 刚,薛正兵,王文晶
(北京航天控制仪器研究所,北京100039)
自主研制移动平台重力仪对我国矿产资源勘探及测绘等领域具有重要意义。研制了一种基于激光捷联惯导的移动平台重力仪,根据移动平台重力测量应用需求及激光捷联惯导系统特点,采用高精度石英挠性加速度计作为重力测量传感器,安装于系统垂向通道,既可作为导航用垂向加速度计,又用于实现标量重力测量。介绍了工程样机系统的组成。利用重力场随高度升高衰减的原理,以相邻楼层间的重力测量差值评价了系统的静态精度;通过地面跑车试验,获得了系统动态测量内符合精度。
移动平台重力仪;激光捷联惯导;差分GPS;重力异常
0 引言
移动平台重力测量是利用重力、定位传感器组合系统进行运动载体重力测量的技术,运动载体可为飞机、飞艇、舰船、潜艇和车辆。它是陆地静态重力和海底静态重力测量的拓展和补充,也是重力测量的发展方向之一。移动平台重力测量具有测量速度快、覆盖范围大等优点,可用于大范围重力普查、无人区重力测量、远程武器发射区快速重力测量等方面。
目前,移动平台重力测量技术在地球物理勘探方面得到广泛应用,尤其是具有简便、快速、经济优势的航空重力测量发展迅速,服务领域涉及基础地质调查与研究,石油、天然气及固体矿产资源勘探,大地测量等方面[1]。航空重力测量的概念最早出现在20世纪50年代末,由于受到当时重力仪、导航定位设备以及垂向加速度测量精度的影响,当时得到的精度为10mGal,不能满足实际应用要求。20世纪90年代初期至今,由于动态差分GPS定位技术的发展,实现了高精度飞机导航定位,从而使航空重力测量所必需的垂直扰动加速度修正的精度和厄缶改正的精度有可能达到1mGal的量级,使航空重力测量的精度有可能达到或好于1mGal。目前各类航空重力测量系统都普遍采用GPS进行定位和测量载体的加速度。国际上航空重力仪主要有三种类型:一种是二轴阻尼惯性稳定平台型航空重力仪,以LaCoste&Romberg公司的II、III型海-空重力仪,ZLS重力仪以及Bell BGM-5重力仪为代表;第二种是三轴惯性稳定平台型航空重力仪,如INS-GPS组合系统,以俄罗斯的GT-1A重力仪和Sander公司的AIRGrav重力仪为代表;第三种是捷联式航空重力仪,如加拿大的SINS-DGPS系统和德国的SAGS系统,俄罗斯也在研制名为GT-X的捷联式航空重力仪[3-6]。
由于重力测量技术可用于军事目的,因此西方掌握该技术的发达国家对我国实施技术封锁,以至于我国移动平台重力测量系统研制基础和水平相对落后。本文基于上述背景,结合国外航空重力测量系统组成方案与移动平台重力测量应用特点,提出了一种基于激光捷联惯导的移动平台重力仪,介绍了其组成及原理,进行了楼层静态精度测试、车载动态重力测量试验,并对测试数据进行了处理及分析。
1 系统组成
移动平台重力仪采用一体式设计,惯性测量部分及电子线路部分均置于同一箱体内。惯性测量部分包含三只石英挠性加速度计和三只激光陀螺仪;电子线路包括二次电源板、母板、计算机板(含数字温控电路)、GPS板、加速度计I/F板。系统组成示意图如图1所示,双频GPS OEM板除作为差分GPS系统的移动站之外,还用于辅助惯性导航,计算机板将采集的仪表输出信息与GPS的位置、速度信息一并送出,存储于外部记录设备。
移动平台重力仪用于测量地球重力矢量的垂向分量,原始测量信息经后处理,输出信息可以是重力矢量的垂向分量值,或者是垂向重力异常值。在后处理提取重力矢量的垂向分量值或者是垂向重力异常值的过程中,需要定位、速度和运动加速度信息进行计算,且用户使用重力信息时需要空间坐标和时间坐标。因此,移动平台重力仪的后处理信息输出还应包含位置、高度、速度和时间信息。
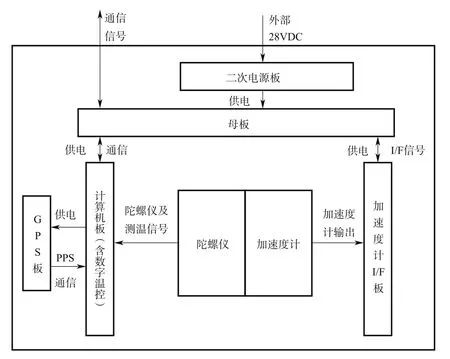
图1 移动平台重力仪组成示意图Fig.1 Principle diagram of the movable paltform gravimeter
移动平台重力仪基本工作原理为:首先,集成于移动平台重力仪中的重力测量加速度计测得沿其输入轴比力,该测量比力通过激光捷联惯导数学平台分解,获得垂向比力分量(含重力和垂向运动加速度);其次,载体GPS接收机与基站GPS接收机组成差分GPS系统,获得载体垂向运动加速度;最后,比力分量与垂向运动加速度求差,再经滤波及各项改正处理,最终提取出重力矢量的垂向分量值,或者是垂向重力异常值。
2 数据处理过程
移动平台重力测量是相对重力测量,需要外部基准对其进行偏差校准、估计和补偿,在测量之前需在基准点进行静态观测,再将测线内重力观测值与基准点参考重力值相联系,测线内空间重力异常(即测线重力异常)的计算公式为:

式中,δg表示测线自由空间重力异常;gb为基准点参考重力值,由陆地静态重力仪从重力基准站联测得到; fz、为比力及其初值;v.u为载体的垂直扰动加速度;δaE为厄特弗斯改正;δaF为空间改正;δaK为零漂改正,δaI为移动平台重力仪及差分GPS的随机噪声,γ0为正常椭球面上的重力。
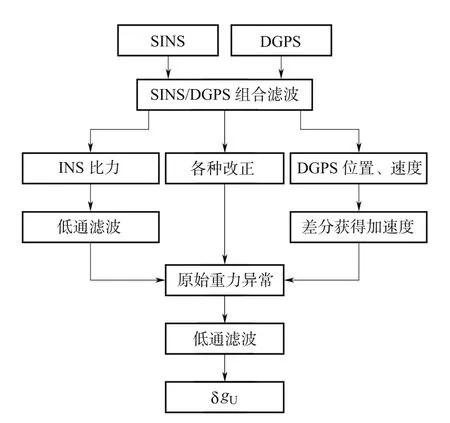
图2 自由空间重力异常估计处理过程Fig.2 Processing flow chart of estimating the free air gravity abnormity
自由空间重力异常估计通过事后处理软件完成,处理流程如图2所示。将捷联惯导计算结果与差分GPS处理结果进行组合滤波,获得转换到当地地理坐标系的比力,以及修正后的载体位置、速度。由载体位置信息作两次差分获得载体运动加速度。对比力信息进行滤波后,扣除各项改正以及载体运动加速度,得到原始自由空间重力异常。再通过特定的低通滤波器,滤除掉由载体不规则运动及振动等因素带来的扰动加速度,最终获得自由空间重力异常估计值。
3 静态试验
利用地球重力场随高度变化率约为0.3mGal/ m的原理可知,通常相邻楼层高度差为3m左右,这样重力仪在相邻楼层分别获得的重力值或重力异常值的差值应在1mGal左右。根据上述原理,验证重力仪静态精度时,不必专门设计或采用额外的装置来获得不同高度试验条件,只需要将重力仪在楼内逐层开展静态测量即可。
试验之前,先通过微伽级陆地重力仪在各楼层采样点进行测量,将测得的相邻楼层重力值相减,获得用于评价移动平台重力仪静态精度的参考差值。由微伽级陆地重力仪获得的参考差值如表1中第2列所示,从1楼~7楼共测量7个采样点,获得6个参考差值。
移动平台重力仪上电预热结束后,开始从1楼至7楼逐层进行静态测量,每个静态采样点测量时间为15min。试验结束后,对原始数据按照自由空间重力异常数据处理过程进行处理,获得各楼层的自由空间重力异常值,之后将各相邻楼层所得重力异常结果进行相减,得到的测量差值如表1中第3列所示。参考差值减去测量差值即为移动平台重力仪测量误差,如表1中第4列所示。
由表1可知,移动平台重力仪测量误差均值为0.093mGal,测量误差标准差为0.160mGal。
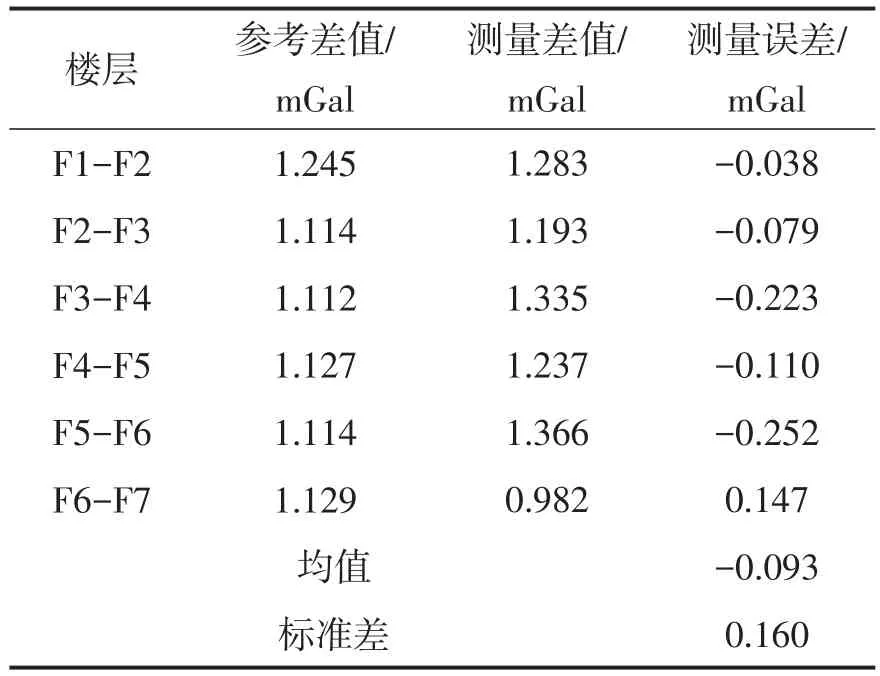
表1 静态试验结果Tab.1 The results of static test
4 车载动态重力测量试验
车载试验系统中,重力仪固定安装于车厢后部,GPS天线固定安装于车顶,重力仪输出的原始数据由车上数据记录设备存储;选取的测量路线为路面平坦的市区公路,基站架设位置距离跑车路段不超过30km,确保了GPS基站与移动站之间的差分定位精度优于5cm,基站GPS原始数据同样由数据记录设备存储。跑车结束后,再将车上数据记录设备及基站数据记录设备的数据下载,按照自由空间重力异常数据处理过程进行处理。
图3给出某次车载动态重力测量四条重复测线数据处理结果曲线。试验车的行驶速度保持在15km/h左右。由于没有获取该段重复测线的重力基准数据,仅对四条重复线结果进行了内符合精度评估。内符合精度反映的是各重复测线测试数据相对它们的平均场数据的符合程度,内符合精度计算结果如表2所示。
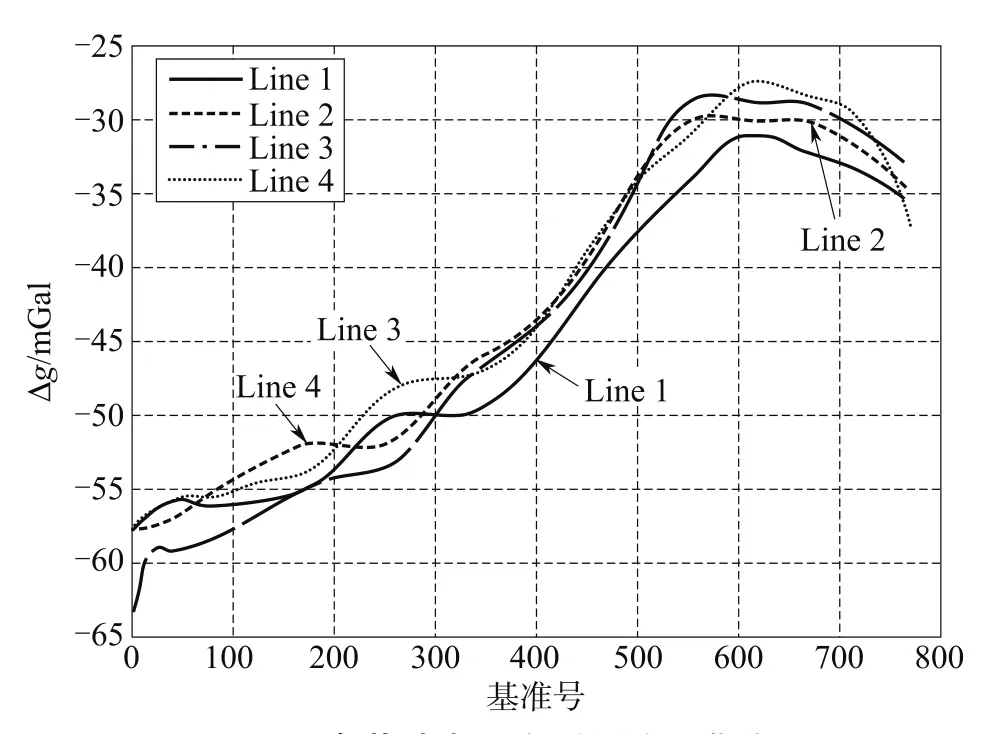
图3 车载动态重力测量结果曲线Fig.3 The results of movable test on ground-vehicle
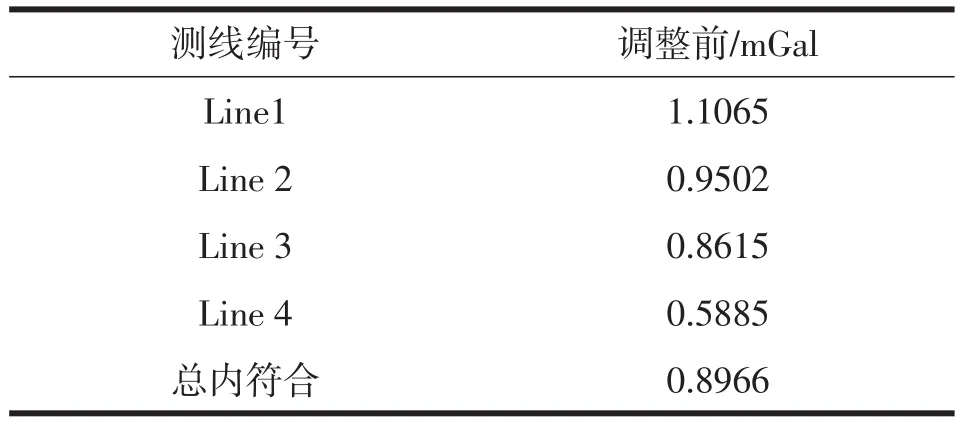
表2 车载动态重力测量内符合精度Tab.2 The internal consistency of movable test on groundvehicle
5 结论
试验结果表明,基于石英挠性加速度计和激光陀螺的捷联惯导系统可以用于移动平台重力测量。其静态精度优于0.2mGal,车载动态重力测量内符合精度优于1mGal。
目前国外先进产品重力测量精度可以达到0.5mGal,该样机精度水平与国外先进产品相比仍存在差距,需要在关键元器件性能提高以及数据处理算法精度提高等方面继续开展研制攻关工作。
综上所述,本文介绍的重力仪系统方案及试验结果对我国自主研制移动平台重力仪具有一定的借鉴和参考价值。
[1]李东明,郭刚,薛正兵,王文晶.激光捷联惯导车载重力测量试验[J].导航与控制,2013,12(4):75-78.
[2]熊盛青,周锡华,郭志宏,周坚鑫,等.航空重力勘探理论方法及应用[M].北京:地质出版社,2010:1-4.
[3]任思聪.实用惯导系统原理[M].宇航出版社,1988:393-428.
[4]Dan Olson.GT-1A and GT-2A airborne gravimeters:Improvements in design,operation,and processing from 2003 to 2010[C]//.Richard Lane.Airborne Gravity 2010,Abstracts from the ASEG-PESA Airborne Gravity 2010 Workshop.Australia:Onshore Energy&Minerals Division,GeoscienceAustralia,2010:152-171.
[5]Nigel Brady.A Turnkey Airborne Gravity System-Concept to reality[C]//.Richard Lane.Airborne Gravity 2010,Abstracts from the ASEG-PESA Airborne Gravity 2010 Workshop.Australia:Onshore Energy&Minerals Division,GeoscienceAustralia,2010:28-36.
[6]Luise Sander,Stephen Ferguson.Advances in SGL AIRGrav acquisition and processing[C]//.Richard Lane.Airborne Gravity 2010,Abstracts from the ASEG-PESA Airborne Gravity 2010 Workshop.Australia:Onshore Energy& Minerals Division,Geoscience Australia, 2010:172-177.
[7]Stephan Sander,Malcolm Argyle,Stefan Elieff,et al. The AIRGrav airborne gravity system[C]//.Richard Lane.Airborne Gravity 2004,Abstracts from the ASEGPESA Airborne Gravity 2004 Workshop.Australia:Onshore Energy&Minerals Division,Geoscience Australia,2004:49-53.
[8]孙中苗,夏哲仁,石磐.航空重力测量研究进展[J].地球物理学进展,2004,19(3):492-496.
[9]王静波,熊盛青,周锡华,等.航空重力测量系统研究进展[J].物探与化探,2009,33(4):368-373.
[10]Jekeli C,Kwon J H.Analysis and processing of Svalbard airborne INS/GPS data for vector gravimetry[R].Interim technical Report.NIMA Contact NMA202-98-1-1110, OSU Project 736145.
Ground Test Results of a Strap-down Gravimeter Used on the Movable Platform
LI Dong-ming,GUO Gang,XUE Zheng-bing,WANG Wen-jing
(Beijing Institute ofAerospace Control Devices,Beijing 100039,China)
Independently developed movable platform gravimeter is of great significance to our mineral resources exploration and survey areas.A movable platform gravimeter based on the laser strap-down inertial navigation system is developed.Considering the application demands of movable platform gravity measurement and the features of the laser strapdown inertial navigation system,the gravity sensor is quartz flexure accelerometer installed in the vertical channel and used as the vertical navigation accelerometer at the same time of measuring the scalar gravity.The work principle of the engineering prototype is introduced.The static precision is tested through the differential gravity measured between neighboring floors,which utilizes the principle that the gravity decays along with the increasing height.The dynamic tests on ground-vehicle are carried out and the internal consistency is calculated.
Movable platform gravimeter;Laser strap-down inertial navigation system;DGPS;Gravity anomaly
U666.1
A
2095-8110(2015)02-0059-04
2014-11-26;
2014-12-30。
国家国际科技合作专项项目编号(2014DFR80750)
李东明(1977-),女,博士,高级工程师,从事惯性导航系统相关技术研究。E-mail:li_dongming@163.com
