气动空间弯曲柔性关节运动功能实验研究
2015-04-16,,,,,
, , , , ,
(1.北华大学 工程训练中心, 吉林 吉林 132021; 2.北华大学 机械工程学院, 吉林 吉林 132021)
引言
气动柔性关节作为一种新型的气动执行元件,与传统的执行元件相比,具有较好的柔顺性、无摩擦、清洁和结构简单等优点,得到了国内外学者的重视并得以快速的发展,具有较好的发展前景[1-3]。柔性关节可用于形状变化较大的工业品搬运,易碎易坏物品的收集等;也可用于水中仿生动物的关节,如鱼鳍和鱼尾等柔性度要求较高的关节;也适用于服务机器人、军事机器人、医疗机器人等领域[4,5]。
目前已有的气动人工关节尚不能完全满足在仿生及特种机器人等领域的特殊需要,迫切需要高度柔顺的新型关节[6,7]。本研究提出的气动空间弯曲柔性关节,能够较好地实现轴向伸长和空间弯曲运动,从仿生角度[8]具备了手指关节的结构和功能特点。
1 关节结构功能与运动原理
所研制的气动空间弯曲柔性关节结构如图1所示,关节主要有3个乳胶管、一组约束元件、3个弹簧和上、下端盖等组成,乳胶管和弹簧沿关节中心对称分布。弹簧作为骨架分别与上、下端盖固定连接;乳胶管两端分别与上封头和下封头连接,上封头、下封头与上端盖、下端盖固定连接成一体,在下封头上设有流体入口。乳胶管、约束件和封头构成的密封良好的腔体称为气动人工肌肉。气动空间弯曲柔性关节相当于三个独立的人工肌肉并联形成的结构,具有三个自由度,能实现轴向伸长和空间弯曲。
单体气动人工肌肉通入压缩气体时,只做轴线伸长,变形长度取决于气体压力p。当气体压力增加时,人工肌肉轴向膨胀带动约束元件移动,使关节主动变形加大;气体压力减小时,关节变形减小;卸去压力时,人工肌肉会在自身的弹力作用下恢复原状。
分别对关节中三个气压值p1、p2、p3进行控制,可以实现关节向任意方向弯曲和沿轴线方向伸缩。
当p1、p2、p3气体压力相同时(如图2a所示,其中,K1、K2和K3分别是三个弹簧的轴向刚度,Kn1、Kn2和Kn3分别是三个乳胶管的轴向刚度),弯矩矢量和为0,关节仅受轴向力作用,将沿轴线方向主动伸长,变形程度由通入压缩气体压力的大小所决定。
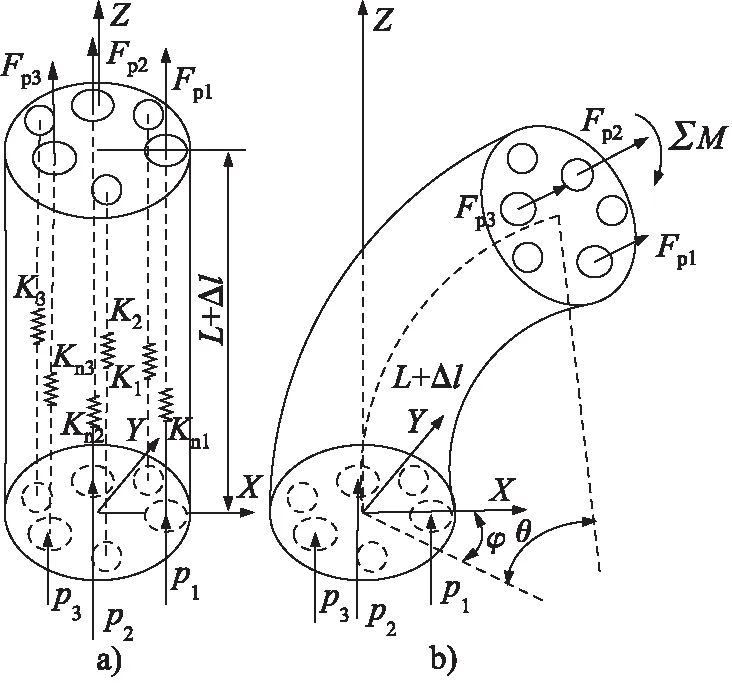
图2 关节受力分析
当p1单独驱动时,关节朝着p2、p3的方向弯曲;当p2、p3相同、p1为0时即两肌肉驱动时,关节向p1的方向弯曲。
当p1、p2、p3压力不同时,弯矩矢量合不为0,如图2b所示,关节发生弯曲和伸长复合的变形,弯矩矢量合的方向决定了弯曲方向,弯曲程度由力矩和∑M大小决定。
2 关节弯曲实验及分析
空间弯曲柔性关节弯曲实验系统如图3所示,主要有气压控制系统和数据检测系统两部分。具体实验装置有气泵、气动三联件、精密减压阀、单片机、数据检测传感器、上位机等设备组成如图4所示。其中,单片机主要作用是采集传感器输出的数据并对其进行处理,处理完以后发送给上位机;数据检测传感器采用磁罗盘和陀螺仪集成一体的传感器,磁罗盘输出数据处理后能够得到柔性关节的空间弯曲方向φ,陀螺仪输出数据处理后得到柔性关节的空间弯曲角度θ。
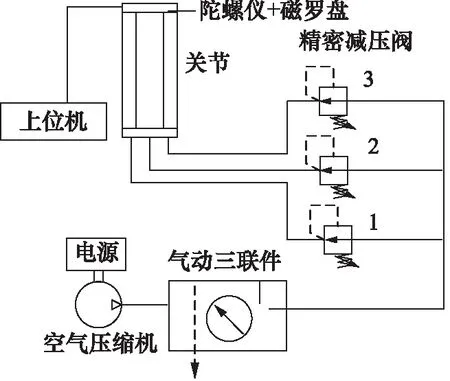
图3 实验系统
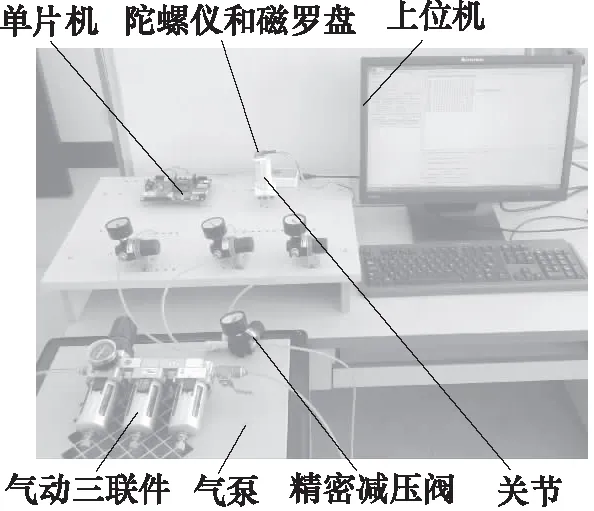
图4 实验装置
为了消除重力对实验造成的影响,将关节垂直固定于X、Y平面,即关节的中心轴与Z轴重合。磁罗盘与关节上端端盖通过螺栓结构固定连接,保证磁罗盘的坐标系与关节坐标系(见图2)平行。实验中,关节中三个气压值p1、p2、p3的调节范围是0~0.35 MPa,气压增量为0.05 MPa,通入不同组合的气压值时,便可以得到一系列的空间弯曲角度θ以及空间弯曲方向φ的实验数据,将数据导入到MATLAB并进行处理,可获得柔性关节空间弯曲角度和空间弯曲方向与气压值p1、p2和p3的关系。实验中采用柔性关节的主要参数如表1所示。

表1 关节的参数
实验过程中,关节在不同气压下主要的空间弯曲形态如图5所示。

图5 关节实物与弯曲形态
2.1 关节空间弯曲方向实验分析
为了消除重力对实验造成的影响,将关节垂直固定于X、Y平面,即关节的中心轴与Z轴重合。通入不同组合的气压值时,关节会向X、Y平面内任意方向弯曲。每次实验中固定p1,依次改变p2和p3,为保证实验数据的准确性,记录10 s的稳态值作为关节弯曲方向的角度值,通过一系列空间弯曲方向实验数据,得到空间弯曲柔性关节弯曲方向φ与所通入的三个气压值p1、p2和p3的关系如图6所示。
当p1、p2和p3三个气压值不同时,关节将同时受轴向力和弯曲力矩的共同作用,力学上属于轴向变形和弯曲变形的耦合变形。关节弯矩矢量合的方向决定了弯曲方向,因为此方向关节端盖所受力矩最小。
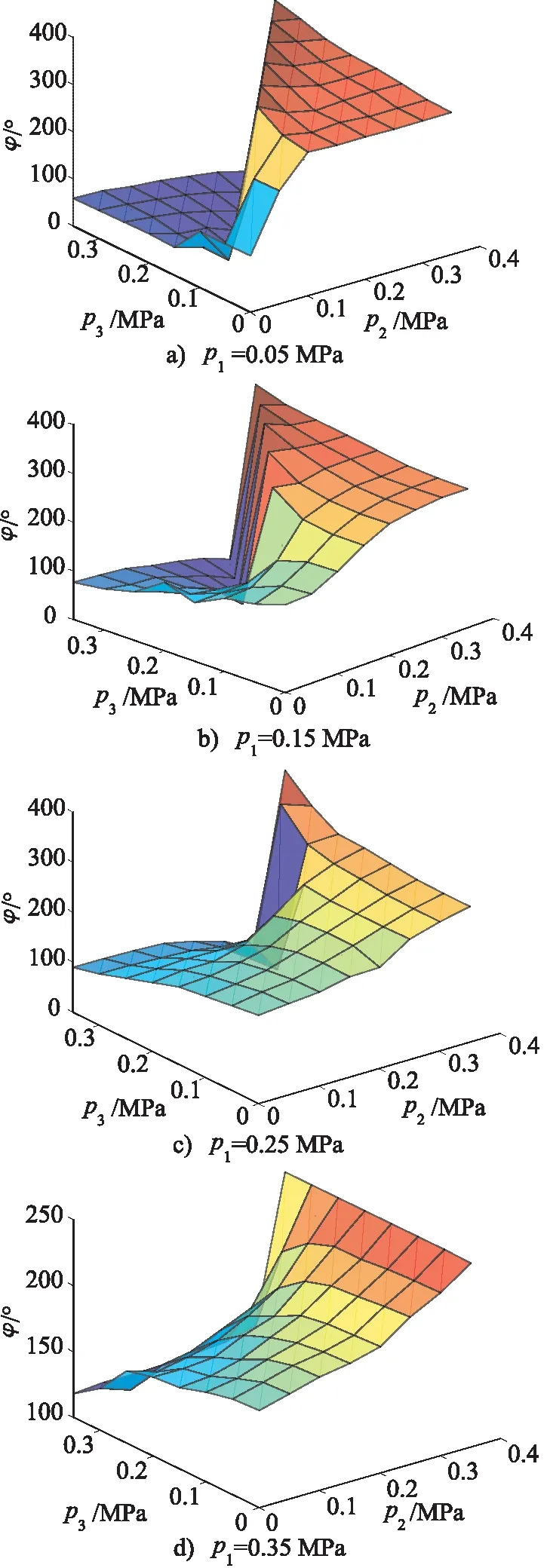
图6 空间弯曲方向与气压值关系
当p1=0.05 MPa时(见图6a),关节弯曲方向分布在第一象限的0°~60°和第四象限的300°~360°范围内;当p1=0.15 MPa(见图6b)和p1=0.25 MPa(见图6c)时,节弯曲方向分布在第一、二、三和第四象限,区别在于(见图6c)比(见图6b)曲面变化平缓; 当p1=0.35 MPa时(见图6d),关节弯曲方向分布在第一和第四象限,角度φ变化范围在120°~240°内,曲面变化平滑。
从图6中可以看出,如果将气压增量进一步细分,气动空间弯曲关节完全可以实现0~360°内任意方向的弯曲。
2.2 关节空间弯曲角度实验分析
空间弯曲柔性关节弯曲角度实验与空间弯曲方向实验过程和方法基本相同,关节的空间弯曲角度通过陀螺仪来测定,将得到的空间弯曲角度实验数据读入到MATLAB进行处理,得到关节空间弯曲角度θ与所通入的三个气压值p1、p2和p3的关系如图7所示。

图7 空间弯曲角度与气压值关系
从图7中知,关节的空间弯曲角度范围0~57.8°,最大值出现在图7a中p2=p3=0.35 MPa,p1=0的气压组合下,即双肌肉驱动。从图7a-图7d,可以看出,每幅图中的最低点出现在p1=p2=p3的情况下,此时关节仅受轴向力作用,处于轴线伸长状态,弯曲角度为0。
由实验可知,关节弯曲角度取决于柔性关节内三个气动人工肌肉通入的压力差形成的力矩和,随着力矩和数值的增大,关节的弯曲角度变大。
3 结论
本研究研制的新型气动空间弯曲柔性关节,具有三个自由度,能够实现空间弯曲和轴向伸缩。
实验结果表明,通过调节关节内三个气囊的工作压力(0~0.35 MPa),关节可以实现0~360°内空间任意方向的弯曲,双肌肉驱动时弯曲角度可达到57.8°。
关节的工作气压一旦确定,空间弯曲方向和角度就能确定关节的空间位置,为以后的理论研究奠定了基础。
参考文献:
[1]黄鹏程,杨庆华,鲍官军,等.新型气动弯曲关节的静态特性分析[J].机器人,2013,35(1):67-72.
[2]熊克凯,韩建海.一种新型气动柔软关节的研制[J].机床与液压,2006,(5):81-82.
[3]张远深,刘明春,赵娜,等.Mikcbben气动人工肌肉技术的发展历程[J].液压与气动,2008,(7):13-15.
[4]耿德旭.气动柔性关节及其在机械手中的应用[D].长春:吉林大学,2011.
[5]Schulz A,Pylatiuk C,Kargov A,Oberle R, Bretthauer G. Progress in the Development of Anthropomorphic Fluidic Hands and Their Applications[C].Mechatronics & Robotics,2004.
[6]Yang Qinghua, Zhang libin, Bao Guanjun, et al. Research on Novel Flexible Pneumatic Acutor FPA [C].IEEE Conference on Robotics,Automatic and Mechatronics,2004.
[7]Suzumori K, Iikura S, Tanaka H. Development of Flexible Microactuator and Its Applications to Robotic Mechanisms [C]. Proceedings of the 1991 IEEE International Conference on Robotics and Automation,1991.
[8]李强,秦先生,应申舜.新型气动人工肌肉在仿生关节中的应用[J].液压与气动,2008,(4):50-54.
