基于区间车速引导的公交运行控制方法
2015-04-16金威敏
滕 靖,金威敏
(同济大学 道路与交通工程教育部重点实验室,上海201804)
城市道路交通运行状态的随机性和客流需求分布的波动性是影响公共汽车(以下简称公交)行车间隔均衡的主要原因.公交线路的车头时距偏差产生后若不及时调控,往往会随运行过程逐步放大,严重的会导致聚簇和大间隔事件,使得乘客候车时间增加,车间客运负荷分配不均,降低服务质量.公交线路运行秩序紊乱还会导致公交车辆周转时间的增加,并由此削减线路的实际运输服务能力.传统公交调度手段主要基于始发站,包括发车间隔或次序临时调整、放车调度、区间车调度等,而对车辆途中运行过程无法干预.这一方面是由于缺乏有效的实时监测和状态识别手段,另一方面是由于缺乏有效的区间行车管控技术.公交运行控制是在车辆运行信息采集条件下的动态、连续调度手段,是稳定线路车辆运行秩序、提升服务可靠性的有效方法,被国际上公认为公交运输管理智能化的核心技术[1-3].
按照控制目的,公交运行控制方法包括两类:一类是基于车头时距的控制[4-6],主要目的是减少车辆到达中途站点的车头时距方差,从而减少乘客在站点的等待时间;一类是基于时刻表的控制,主要目的是提升车辆按时刻表到站的行车兑现率.既有研究成果表明在较高客流密度且发车间隔密集的情况下,采用基于均衡公交车辆车头时距的实时控制方式更具有实用价值[7],我国大中城市中心城区客流密度大、行车间隔密宜采用此控制方式.按照控制实施的空间范围,公交运行控制方法又可分为两类:驻站控制和区间控制.驻站控制是国外发达国家公交运行控制的常用方法,但对于我国大城市中心区公交线路往往难以使用[8-9],仅限于枢纽站点.这主要是由于我国公交车站复线率高,泊位资源紧张,较多线路参与驻站优化会造成车站停靠能力严重不足,所导致的排队延误会在多线路间传播.
区间控制主要指车速控制,驾驶员获取调度中心发送的引导信息以调整车辆在站间的行驶时间.相对于驻站控制,车速控制不会浪费车站泊位能力且不会显著增加车内乘客在站等待时间,乘客更容易接受车速控制方法[10].美国芝加哥和法国巴黎都曾开展过公交 AVL(automatic vehicle location)系统实验项目:在公交车辆上安装车载显示屏,用以提示实时的车头时距信息,通过影响司机的驾驶行为来导引车辆有序运行,提前预防车辆聚簇现象,是一种主动的公交运行控制方法[8].Daganzo提出车-车通信条件下以实现动态预测相邻车头时距基础上的巡航车速控制方法和全程控制系统架构,通过分散控制来弥补交通中断和不正确的驾驶行为,预防车辆产生聚簇[11].Ma等人设计了能实时调整公交车车速与驻站时间的公交车辆经济驾驶辅助实验系统[12].近年来车路协同技术、车车通信技术为公交车辆区间车速控制提供了更加全面的支撑条件,同济大学现已建立了车路协同下的公交车速引导硬件条件和通信环境,为开展相关研究提供实验平台.
本文在分析公交线路车头时距偏差演化特征基础上,提出以车组为基本控制单元的区间车速引导控制模型,期望为单线路公交智能化调度提供决策支持方法.
1 控制原理与逻辑
本文基于所获取的上海中心城区25条公交线路AVL数据,对车头时距偏差(车头时距偏差定义为相邻公交车辆在中途停靠站的离站车头时距与始发站发车时距的差值)在空间上的传播规律进行了分析[1],统计上发现了对应于各站点的车头时距偏差控制阈值,且该阈值随着不同时段道路通行条件和客流负荷条件的变化而动态变化.当公交车车头时距偏差小于受控阈值时,后续运行过程的车头时距偏差不呈现线性放大趋势.驾驶员根据本线运行经验能够克服道路通行环境和客流条件随机变化导致的小幅车速变化,车组有自主调节车头时距偏差的能力,无需控制手段介入,可认为处于驾驶员自律-经验调节范围.此种状态下采取控制手段反而会较多地分散驾驶员注意力,增加控制成本,得不偿失.当公交车头时距偏差的绝对值超过某一阈值后,车头时距偏差向下游传播且线性放大的概率大大增加,公交车头时距偏差难以通过驾驶员自律调整恢复到阈值范围内,若不及早进行预防与引导,后续控制成本将大大增加.在此种状态下,及时把握控制时机是非常重要的.该发现与以往研究多以车组空间距离偏差作为调度决策参数并认为其是个静态量(大间距)有所不同.
本文提出的区间车速引导控制逻辑如图1所示.通过对历史数据库进行特征参数标定,建立控制阈值曲线.在此基础上,对公交运行状态趋势进行识别并获取车速控制启动的时机.区间车速决策参数来自于优化模型,车速的引导实施通过车载显示器向驾驶员发布.具体的控制步骤如下:
步骤1 基于历史数据标定离站车头时距偏差控制阈值;
步骤2 检测线路上相邻公交车辆的离站车头时距偏差,进行运行状态判别;
步骤3 计算引导车速建议值;
步骤4 在车载显示屏上给司机提供当前车头时距值以及区间平均行驶车速(或平均行驶时间)的建议值.
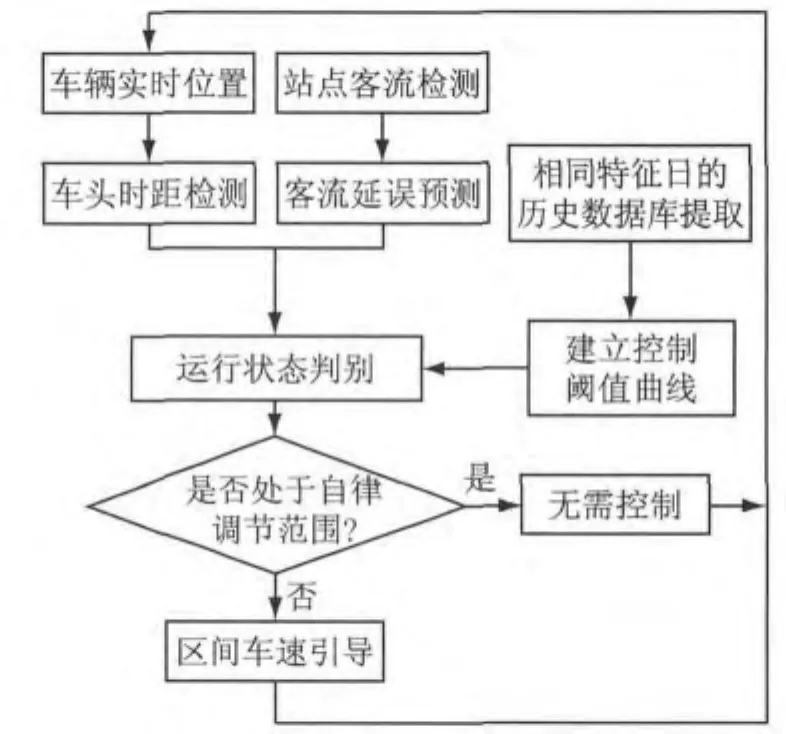
图1 公交车速引导控制逻辑框图Fig.1 Control logic of section-speed guiding method
2 控制阈值标定
采用线性回归的方法对由AVL数据处理得到的车头时距进行统计分析发现,车头时距偏差和当前车辆位置与始发站之间的距离有关,和当前时段的道路交通流特征有关,且偏差放大速率呈现一定规律.图2记录了上海市210路(统计数据来源于2013年4月15日从5:00~22:00的AVL数据)终点站到站车头时距偏差超过发车间隔1倍及其以上的车辆班次,随路径行程时间(公交车辆相对于始发站的行程时间)变化的车头时距偏差分布情况.可以看到,当车辆在上游站点的车头时距偏差累积到一定阈值时,偏差延误在下游站点的传播和放大的可能性将显著增加.此规律对验证的25条公交线路中的22条适用,具有一定的普遍性.基于此,本文从防控延误放大风险目的出发,提出构建车头时距偏差控制阈值函数,用于估计下游站点控制阈值,以此确定控制启动时机.
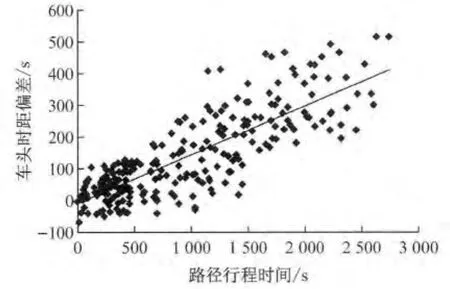
图2 车头时距偏差与路径行程时间的散点图Fig.2 Headway deviation versus path travelling time
基于某特征时段AVL历史数据,能够标定沿线各站车头时距偏差绝对值(以下简称车头时距偏差)的控制阈值函数为

式中:Δhj为站点j的离站车头时距偏差的控制阈值;j为车站自起点站序号,这里取j∈(2,…,m-1),起点站的标号为1,单程终点站标号为m;tj为站点j的路径行程时间(车辆在站点j相对于起点站的行程时间);α,β均为标定的参数.
基于本例公交210路采集数据标定得到车头时距偏差控制阈值函数为Δhj=0.152 3tj-5.976 8,相关系数R2=0.695 5,自变量tj的P检验值<0.05.如果未来实际运用中发现Δhj与tj有其他相关关系,可选择其他函数进行标定,灵活应用.
3 车速调整控制模型
一辆车与前车和后车都能构成一个车组,且车组的控制会影响相邻车组的时距变化.本文结合工程实践,调整时将运行在线路上的n-1个车组按照车头时距偏差从小到大排序,在前1/3(建议值)车组中将数量最多的相邻车组合并作为基准(不予以调整),逐次向两侧计算车辆车速调整参数.车速调整包括:车辆降速和车辆提速两类,所谓降速和提速是相对于区间特征时段的历史平均行驶车速常速而言的.当车组的车头时距偏差小于控制启动阈值时,公交车保持自律行为,调度中心不向驾驶员发布提示信息;否则,发布车速调整建议以及区间车速目标值提示信息.
区间车速调整等同于区间运行时间调整.区间运行时间的调整要考虑实施的可行性,结合工程实践可取行驶速度(自小至大排序)的25分位值作为允许的最小行驶速度 (考虑公交车的行程时间不能过长),85分位值作为允许的最大行驶速度[13].区间运行时间调整是一个渐进的反馈式修正过程.下面给出引导车速建议值的计算方法.
公交车辆的离站时间为

式中:Di,j为第i个班次公交车在第j站点的离站时间,即Di,j=Ai,j+di,j;ti,j为第i个班次公交车在区间j→j+1的行程时间,即公交车在j+1站点的到站时间与公交车在j站点的离站时间之差,即ti,j=Ai,j+1-Di,j;Ai,j为第i个班次公交车在第j站点的到站时间,即Ai,j=Di,j-1+ti,j-1;di,j为 第i个班次公交车在第j站点的停靠时间;vi,j为第i个班次公交车在区间j→j+1的理想引导车速;Lj为区间j→j+1的距离.
相邻班次所允许的最大离站车头时距偏差(即标定的控制阈值)为

式中:c为调整参数,c∈(0,1);Δhi,j为第i个班次在站点j的车头时距偏差控制阈值,取值来自于各特征时段的Δhj.
将式(2)代入到式(3),可以得到

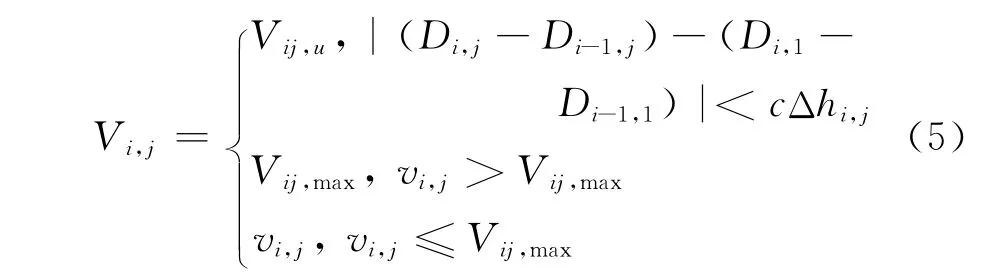
当Hmin<P<0时,即相邻班次的公交车辆处于“靠近”状 态,得 出vij=Lj/(cΔhi,j+1+Di,j+di,j+1-Di-1,j+1-Di,1+Di-1,1),因此

式中:Vi,j为第i个班次公交车在区间j→j+1建议的引导车速;Vij,u为相同特征日下相同特征时段的第i个班次在区间j→j+1的平均行驶车速统计值,定义为常速;Vij,max为第i个班次公交车在区间j→j+1允许的最大行驶速度;Vij,min为第i个班次公交车在区间j→j+1允许的最小行驶速度;Hmin,Hmax分别为时刻表松弛时间的最小值和最大值.
4 案例研究
4.1 实验数据
以上海市公交210路在2013年2月15日至4月15日的AVL数据作为历史数据.该线路位于上海中心城区范围,有14个停靠站点,运行方向从永和新村站到新闸路温州路站,线路长度9.75km.发车间隔为:高峰时段为3~5min,平峰时段为7~12 min.本文构建计算机仿真模型对所提出的区间车速引导控制方法进行评价分析.
4.2 仿真评价模型
仿真模型包括3个部分:始发站调度模块,公交线路运行模块和车速控制模块.图3描述了仿真逻辑.其中,公交线路运行模块模拟了每辆公交车的站间运行过程和在站停车过程.在非受控状态下,公交车在站间的行驶时间作为一个随机变量,通过对历史数据的统计,在特征时段公交车区间行驶时间服从正态分布;车辆在站停车时间主要取决于上下客流量,通过对采集客流统计,乘客到达公交站点服从泊松分布,对于发车间隔小于10min的公交线路该假设与同类研究成果一致[4].停靠时间是上车人数bi,j(由乘客平均到达率和相邻班次车头时距共同确定)的线性函数,为di,j=τ+θbi,j,参数τ和θ利用回归方法进行标定得到.
车速调整模块的任务是在生成区间行驶速度之前,计算相邻班次的车头时距偏差,然后按照上文的控制逻辑实施车速引导,见图3.当模拟完一个班次的运行过程后,由终点站调度模块按照基本作业时间参数和既定发车顺序给出下一个班次的发车时刻.本例中,中途站车辆的到站顺序均与始发站的发车顺序相同.
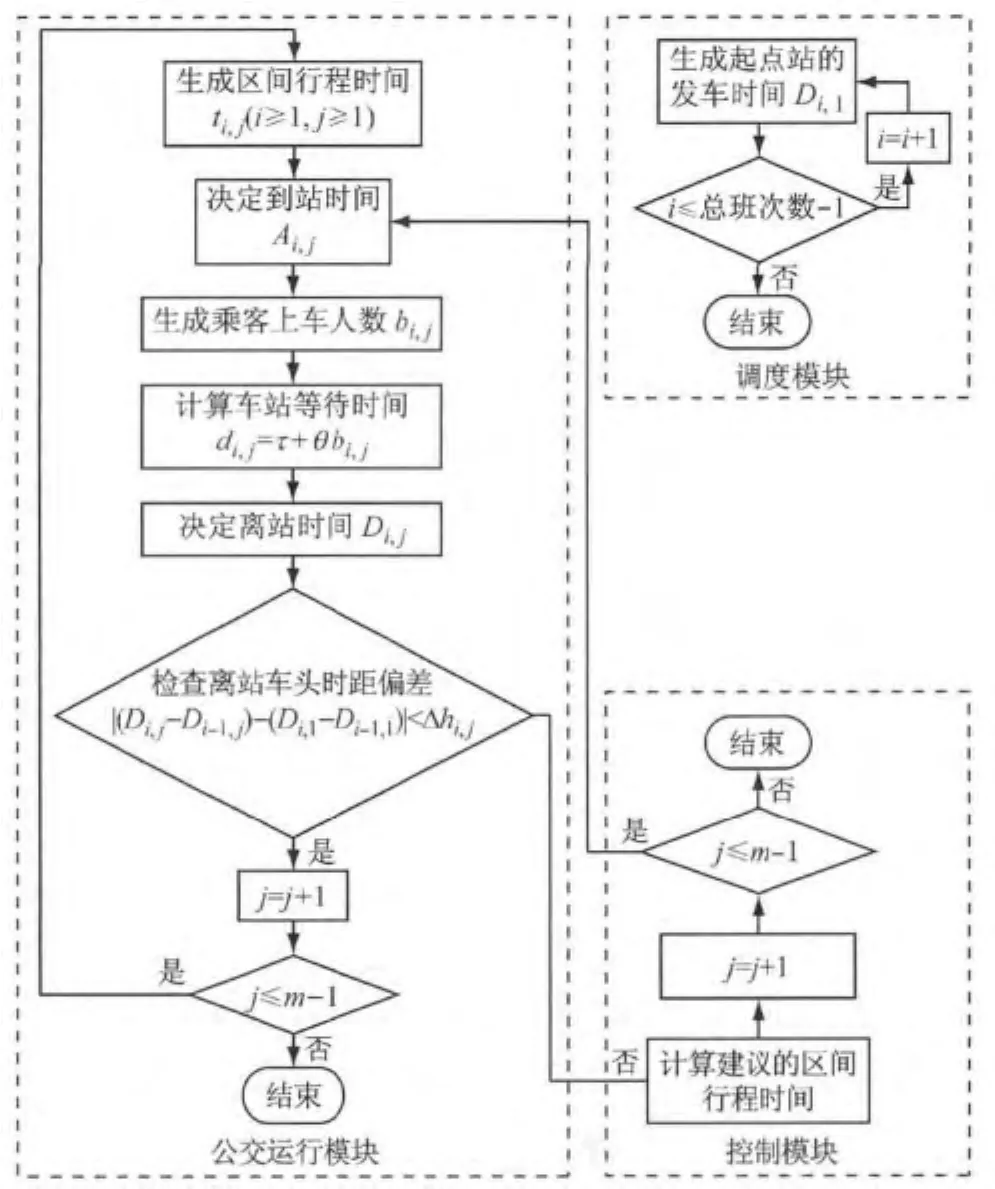
图3 仿真过程流程图Fig.3 Flowchart of the simulation procedure
4.3 控制参数
本文在AVL历史数据库中提取特征日各特征时段站间区间的平均行驶车速数据.取区间平均行驶车速(自小至大排序)记录中的25分位值作为允许的最小平均行驶速度Vij,min,85分位值作为允许的最大平均行驶速度Vij,max.图4给出了5个不同路段行程时间的分位值(2.5%,25%,50%,75%,97.5%).

图4 路段行驶速度箱型图Fig.4 Box-plot of link travelling speeds
本文将所提出的基于动态车头时距阈值的区间车速控制方法与基于静态的车头时距阈值的区间车速控制方法进行比较.按照惯用的车头时距控制标准取值方法,基于静态的车头时距阈值的区间车速控制最大车头时距偏差阈值取高峰时段2min,平峰时段4min[7].
4.4 控制性能评价
本文选取车头时距方差和车辆在路段的行程时间作为性能评价指标,因为车头时距方差能反映车队按计划运行的有序性和乘客候车时间成本,行程时间则能反映乘客在途时间成本及车队运行效率.下面对3种情形进行性能指标比较:不控制,本文提出的控制方法(以下简称动态控制),基于静态的车头时距阈值的控制方法(以下简称静态控制).
4.4.1 车头时距标准差
对比车头时距偏差的演化过程,图5a为公交车辆不受控的情形.可以看出随着公交车辆远离始发站,车头时距偏差呈现加速放大的趋势.图5b为本文提出的动态控制效果.可以看到动态控制方法防止了车头时距偏差的进一步传播和扩大,对偏差的放大趋势有一定的抑制作用,全线最大车头时距偏差控制在5min内,也为终点站反向按计划发车创造条件.

图5 车头时距偏差控制效果图Fig.5 Control effect on headway deviation
进一步地从图6中可以看到,公交车辆不受控时车头时距标准差随着运行过程呈上升趋势.采取静态控制后,车头时距标准差有一定下降,但是不能遏制车头时距偏差随运行过程放大的趋势.采取动态控制后车头时距标准差有较大的降幅,并呈现趋稳态势.这对于我国大城市中心城区频繁受到通行条件影响、客流波动影响的公交线路来说,有比较积极的运行质量改善效果.
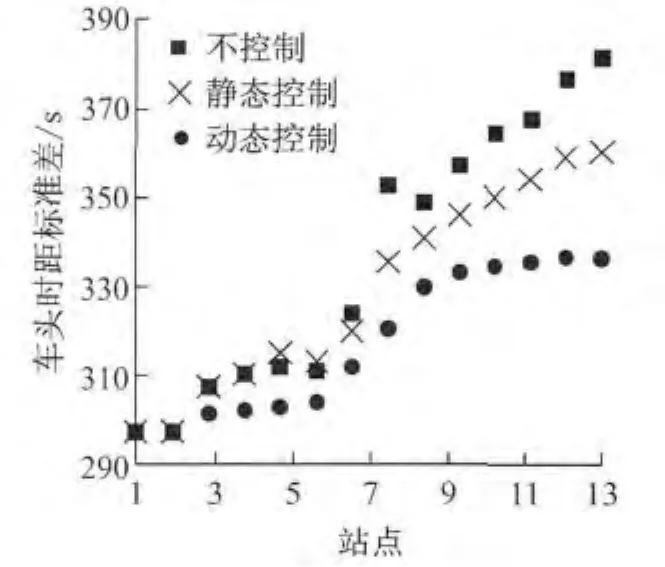
图6 3种情形下各站点(随运行过程)的车头时距标准差分布图Fig.6 Comparison of standard deviation of headways in three situations
4.4.2 乘客站点等待时间
如图7所示,动态控制能较明显地减小全线乘客在站点的平均等待时间,较无控制情况降低12%.

图7 3种情形下全线乘客平均等待时间对比图Fig.7 Comparison of waiting time in three situations
4.4.3 车辆单程行程时间

图8 3种情形下班均行程时间图Fig.8 Comparison of journey time in three situations
图8比较了3种情形下的班均单程行程时间.静态控制下公交车的行程时间增加了14%;而采取本文提出的动态控制方法,班均行程时间仅略微增加5%.可见,在确保行车秩序稳定的同时动态控制方法对车辆周转时间的影响较小,运能损失代价较小.
5 结语
本文提出了一种基于动态的车头时距偏差阈值的区间车速引导控制方法,一定程度缓解了公交线路局部车头时距偏差的定向增加或减少的趋势,降低了车头时距偏差绝对值持续放大的可能性.动态控制阈值来自于对车头时距偏差放大趋势概率的状态识别,是一种渐进式的主动控制方法.与基于静态控制方法相比,动态控制方法的控制逻辑和控制性能指标表现更佳.
当然,实践中该控制方法的实施效果取决于与ITS(intelligent transport system)工程技术及驾驶员行为的有机结合.我国城市道路行驶环境复杂,模型优化得到的区间行驶车速建议值并不一定能在某次实际执行中完全实现,通过驾驶员自身的人机经验积累和训练、调度系统的滚动控制及外部道路交通管控系统的协调和配合,特别是未来车路协同环境条件的成熟,该控制方法对单线路公交运行质量的改善效果会显著体现,可实施性将会进一步提升.
[1] 同济大学.上海市公共交通信息服务及行程时间预测方法研究[R].上海:同济大学,2010.Tongji University.Shanghai public transportation information services and travel time prediction method[R].Shanghai:Tongji University,2010.
[2] CHEN Guojun, TENG Jing,ZHANG Shuyang,etal.Tendency-based approach for link travel time estimation[J].Journal of Transportation Engineering,2013,139(4):350.
[3] CHEN Guojun,ZHOU Xuemei,ZHANG Dong,etal.Proportion-based and tendency-based bus trajectory prediction models[J].Journal of Transportation Engineering,2012,139(9):896.
[4] FU Liping,YANG Xuhui.Design and implementation of busholding control strategies with real-time information [J].Transportation Research Record:Journal of the Transportation Research Board,2002,1791(1):6.
[5] Bartholdi J J,Eisenstein D D.A self-coordinating bus route to resist bus bunching[J].Transportation Research Part B:Methodological,2012,46(4):481.
[6] Daganzo C F.A headway-based approach to eliminate bus bunching: Systematic analysis and comparisons [J].Transportation Research Part B:Methodological,2009,43(10):913.
[7] LIN Guoming,LIANG Ping,Shonfield P,etal.Adaptive control of transit operations[R].Washington D C:United States Federal Transit Administration,1995.
[8] Strathman J G,Kimpel T J,Dueker K J,etal.Bus transit operations control:Review and an experiment involving tri-met's automated bus dispatching system[R].Portland:Portland State University,2000.
[9] Osuna E E,Newell G F.Control strategies for an idealized public transportation system[J].Transportation Science,1972,6(1):52.
[10] Chandrasekar P,Cheu R L,Chin H C.Simulation evaluation of route-based control of bus operations [J].Journal of Transportation Engineering,2002,128(6):519.
[11] Daganzo C F,Pilachowski J.Reducing bunching with bus-to-bus cooperation [J].Transportation Research Part B:Methodological,2011,45(1):267.
[12] MA Wanjing,XIE Hanzhou,HAN Baoxin.Development and evaluation of an economic-driving assistance program for transit vehicles[J].Energies,2012,5(2):371.
[13] 任福田,刘小明,荣建,等.交通工程学 [M].2版.北京:人民交通出版社,2008.REN Futian,LIU Xiaoming,RONG Jian,etal.Traffic Engineering [M].2nd ed.Beijing:China Communications Press,2008.
