车辆悬架联合反馈半主动控制算法
2015-04-12张进秋彭志召王兴野
张进秋,张 磊,彭志召,蒋 磊,王兴野
(1.装甲兵工程学院装备试用与培训大队,北京 100072; 2.白城兵器试验中心,白城 137001)
2015176
车辆悬架联合反馈半主动控制算法
张进秋1,张 磊1,彭志召1,蒋 磊2,王兴野1
(1.装甲兵工程学院装备试用与培训大队,北京 100072; 2.白城兵器试验中心,白城 137001)
为提高车辆乘坐舒适性,基于采用典型算法的车身加速度幅频特性分析,提出了基于车身速度和加速度信号联合反馈控制的半主动控制算法。以天棚半主动控制作为参照,对该算法的性能进行了分析和评价。结果表明,该算法能够实现对车身加速度、悬架挠度和车轮动载荷等悬架性能指标的有效控制,在大幅提高车辆乘坐舒适性的同时改善了操纵稳定性。算法简单实用、计算量小,适用于车辆悬架系统的振动控制。
悬架系统;控制算法;联合反馈控制;半主动悬架
前言
悬架是车辆行驶系统不可或缺的组成部分,其性能直接决定车辆的乘坐舒适性、操纵稳定性和行驶安全性[1-2],车辆对性能优越的悬架系统有着迫切的需求。现阶段,基于主动、半主动控制的可控悬架技术是提高悬架性能公认的有效途径,而简单有效、性能良好的控制算法一直是可控悬架开发的关键问题之一。
车辆悬架控制算法方面的研究几乎涉及了所有先进的控制理论和方法。目前应用于车辆悬架的控制算法主要分为3类:一是经典控制算法,基于系统动力学模型建立输入与输出之间的参数依赖关系,较具代表性的有天棚[3-4]和加速度阻尼控制算法[4-5];二是现代控制算法,基于线性时不变系统和现代理论对系统实施控制,如LQR控制[6]和鲁棒控制[7];三是智能控制算法,如人工神经网络控制[8]和模糊控制[9]等。各类控制策略均能不同程度地改善悬架性能,但其中也有些算法由于计算复杂而不适合于工程应用。从工程应用的角度出发,经典控制具有计算量小、简单实用等优点,更具适用性[10]。车辆悬架算法研究存在的另一个问题是难以同时兼顾乘坐舒适性和操纵稳定性。
本文中以进一步改善半主动悬架性能为目标,对天棚控制和加速度阻尼控制两种经典控制算法频域上的互补关系,提出一种联合反馈半主动控制算法,以天棚控制为参照对该算法进行分析和评价。
1 悬架系统动力学模型与分析
1.1 悬架系统动力学模型
对于采用独立悬架的车辆,假设质量分配系数为1,且仅考虑其垂向振动,可建立如图1所示的双质量可控悬架系统动力学模型。假设坐标原点选在各自平衡位置,则可控悬架动力学方程为
(1)
式中:ms和mt分别为车身和车轮质量;ks和kt分别为悬架弹簧和车轮刚度;cs为悬架阻尼系数;xs,xt和xr分别为车身、车轮垂向位移和路面不平度激励;us为控制力。
1.2 典型算法频响特性分析
1.2.1 天棚控制
天棚(sky-hook, SH)控制的思想是在车身和假想“天棚”之间安装一个天棚阻尼器以衰减车身振动。由于现实中无法找到假想的“天棚”,只能通过在车身和车轮间施加控制力来实现,其控制力为
(2)
式中csky为天棚阻尼系数。
将式(2)代入式(1)进行复变换,整理得
(3)
通过式(3)来分析天棚阻尼系数取值对车身加速度幅频特性的影响。以某型乘用车悬架为研究对象,其悬架参数取值如表1所示,天棚阻尼系数分别取0,1 000和2 000N·s/m,分析结果如图2所示。

表1 悬架参数取值
由图2可知,SH控制有助于抑制低频区(低于车身共振频率)车身加速度,且随着天棚阻尼系数csky的增大控制效果更为明显,但对中(车身和车轮共振频率之间)、高(高于车轮共振频率)频段的控制基本失效。
1.2.2 加速度阻尼控制
加速度阻尼(acceleration driven damping, ADD)控制是近年提出的又一车辆悬架控制算法,它通过在车身和车轮间施加一个与车身加速度方向相反且大小成比例的控制力来实现,其作用可理解为增大车身质量。ADD控制算法的控制力可表示为
(4)
式中α为比例系数,其取值通常不宜过大。
将式(4)代入式(1)并经复变换得
(5)
取表1所示的悬架参数,分析式(4)中比例系数α取值对车身加速度幅频特性的影响。分析过程中,α分别取0,0.3和0.6,结果如图3所示。
由图3可知,ADD控制能够有效抑制中、高频段的车身加速度,且随着α的增大,该控制对中、高频加速度的抑制效果更佳;而在低频区,该控制导致车身加速度控制恶化,随着α的增大,车身加速度的控制恶化现象更为明显。
2 联合反馈控制算法
2.1 算法设计
幅频特性分析表明,SH控制和ADD控制对于车身加速度的控制在频域上存在一定互补关系,即SH控制有助于在中低频区实现对车身加速度的有效控制,而ADD控制在中高频段对加速度的抑制效果较佳。基于两种常用控制算法频域对车身加速度控制频域空间的互补关系,提出一种车身速度和加速度联合反馈控制算法,简称联合反馈(associated feedback, AF)控制,其控制力可表示为
(6)
分析式(1)和式(6)可知,当α=0时,该悬架系统控制模型退化为SH控制;当csky=0时,可等效为ADD控制,算法的实质是SH和ADD两种控制的时域结合。从另一角度对该算法进行理解,车辆振动控制的目标是在激励干扰下使受控量尽可能快速恢复初始状态。对于车辆振动控制,初始状态车身速度和加速度均为0。式(6)中控制力由两部分组成,分别用于抑制和衰减车辆垂直振动的加速度和速度,使其同时向初始状态移动。
将式(6)代入式(1)并经复变换得
(7)
取表1中悬架参数分析式(6)中比例系数和天棚阻尼系数对车身加速度幅频特性的影响。分析时,天棚阻尼系数和比例系数取值见表2,分析结果如图4所示。

表2 参数取值
由图4可知,当α和csky取值合理时,FA控制几乎可在覆盖车辆振动特性的全部频段(0~30Hz)实现对车身加速度的有效控制。当csky取值确定时,随着α取值的增大,算法在中高频段对加速度的控制作用增强,在低频段控制作用减弱。控制时,可根据需要对α和csky进行合理选择。
半主动控制具有功耗低、结构简单、容错性好和性价比高等特点[11-12],本文中探讨基于FA控制算法实现悬架的变阻尼半主动控制。基于式(1)建立悬架变阻尼半主动控制动力学方程:
(8)
式中悬架阻尼cs为时变控制变量。
FA控制“on-off”半主动实现方法为
(9)
式中us按式(6)计算。
2.2 参数分析
FA控制中α和csky的取值对加速度幅频特性影响较大,但上述分析没有考虑这2个参数对悬架动挠度和车轮动载荷等指标的影响。本节综合考虑车身加速度、悬架动挠度和车轮动载荷3个指标,对FA控制α和csky的取值进行进一步分析。
根据随机振动理论,响应均方值[13]可表示为
(10)

假设车辆在C级路面匀速行驶,车速为20m/s,车身和车轮质量、悬架和车轮刚度取值与表1相同。进行半主动变阻尼控制时,式(9)中cs分别取cmin=500N·s/m,cmax=3000N·s/m,控制力范围为[-1500,1500]N。取csky=2500N·s/m,分析α在[0,1]区间取值时算法对悬架各指标均方根值的影响,结果如图5所示。
分析图5可知,FA半主动控制中天棚阻尼系数csky确定后,随着比例系数α的增大,加速度均方根值先急剧减小,在α=0.5后逐渐趋于稳定;动挠度和动载荷均方根值随α的增大呈增大趋势,且增大的趋势先快后慢。设计算法时,可根据控制目标调整α和csky的取值。
3 性能分析与评价
选取车辆振动控制领域常用的SH半主动控制作为参照,以车身加速度、悬架动挠度和车轮动载荷为指标,从时域和频域的角度对FA半主动控制算法进行性能分析和评价。
SH控制的半主动“on-off”控制逻辑为
(11)
基于Matlab/Simulink建立被动、天棚和联合反馈半主动悬架控制模型。其中,ms,mt,ks和kt取值见表1,控制变量cs分别取cnom=1500N·s/m(被动),cmin=500N·s/m,cmax=3000N·s/m。本文算法设计侧重改善乘坐舒适性,因此取csky=2500N·s/m,α=0.5。
3.1 时域分析
进行三角带障碍冲击和随机激励两种时域响应分析。其中,三角冲击主要考察车辆悬架的高频冲击响应,考察的主要指标是车身加速度;随机激励响应用于综合分析算法有效性。
(1) 三角带障碍冲击
假设车辆以2m/s的速度通过前方三角形减速带,减速带高0.05m、宽0.2m,不同控制条件下车辆各指标时域响应如图6所示。
由图6(a)可见,车身加速度在FA半主动控制下较被动悬架和SH控制都有显著降低,说明FA控制在三角带障碍冲击下有助于明显改善车辆乘坐舒适性;与SH控制相比,车辆在FA控制下加速度小幅波动时间较长。由图6(b)可见,FA控制下悬架动挠度并未撞击悬架限位(假设悬架行程范围为[-0.1,0.1]m);由图6(c)可见,FA控制车轮离地,但时间较短,仅为23ms。
(2) 随机激励
基于谐波叠加法分别生成车速为20m/s时C级和D级路面的路面激励时域曲线作为输入。由于篇幅限制,文中仅给出C级路面激励时域曲线,如图7所示。
车辆在C级路面行驶时悬架各指标的时域响应如图8所示。在图8所示的仿真时段内,SH控制对于车身加速度的控制效果有限,甚至在一些时刻出现了较为明显的控制恶化,而FA控制却能明显降低车身加速度,提高车辆舒适性。对于悬架动挠度指标,SH控制和FA控制均达到了良好的抑制作用。FA控制在一定程度上导致车轮动载荷的增大,但并未导致车轮离地。
表3为3种悬架在不同等级的路面行驶时悬架各指标均方根值和峰值计算结果。FA控制对车身加速度的抑制作用明显优于SH控制;对于悬架动挠度的控制,FA控制的作用不及SH控制,但与被动悬架相比并未出现较大的恶化;对于车轮动载荷的控制,FA控制不及SH控制和被动悬架。
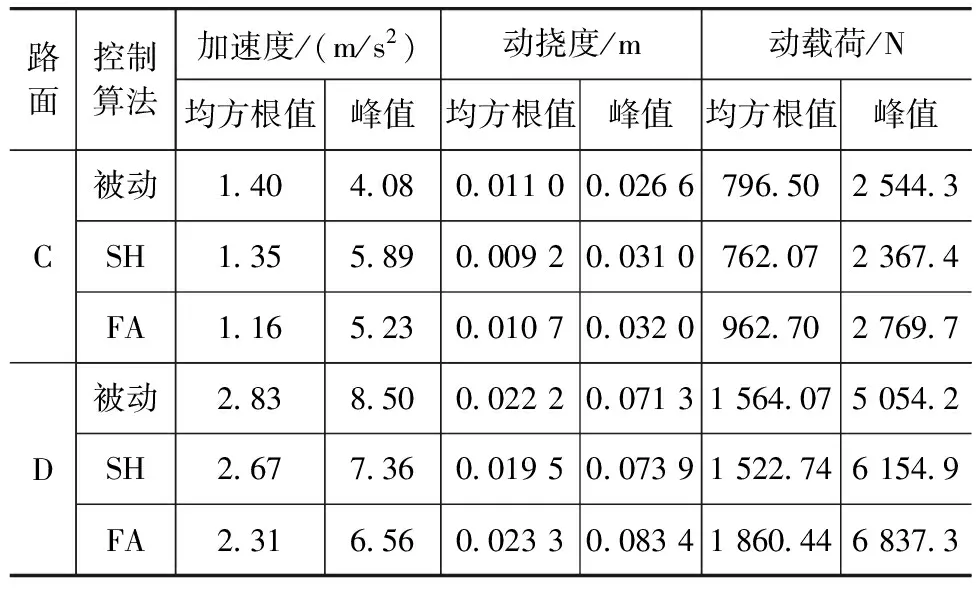
表3 悬架各指标均方根值和峰值计算结果
3.2 频域分析
时域上悬架各指标统计结果带有一定偶然性和随机性,不能完整反映算法性能,还须通过频域分析对算法性能进行全面分析。本文中采用近似估计传递特性曲线的方法对设计的半主动控制算法进行频域分析。
不同控制条件悬架各指标传递率计算结果如图9所示。FA控制大部分频段均优于被动悬架和SH控制,特别是在对舒适性影响显著的4~8Hz频率范围内控制效果尤为明显。对于悬架挠度,FA控制在低频段优于被动悬架,高频不及被动悬架,控制效果与SH控制相当。从车辆隔振的角度,悬架动挠度并不是越小越好,只须将其限制在设计范围内,降低撞击悬架限位的概率即可。撞击限位主要发生在振幅较大的低频区,特别是车身共振区。从这个角度分析,FA控制和SH控制都起到了抑制车身共振、防止撞击悬架限位的作用。FA控制在中低频段较被动悬架能实现对动载荷的有效控制,在车轮共振区控制效果较差,中频区的控制效果明显好于SH控制。上述分析结果说明FA半主动算法在改善车辆乘坐舒适性的同时,一定程度上较好地兼顾了悬架动挠度和车轮动载荷2个指标。
3.3 悬架性能评价
车辆乘坐舒适性一般采用计算加权加速度均方根值的方法进行评价,而该方法难以排除路面不平度和车速的影响;操纵稳定性评价多以车轮动载荷均方根值为指标,但却没有考虑路面输入的频率差别。文献[14]中针对上述评价方法的不足,分别定义了舒适性评价函数和操纵稳定性评价函数,提高了悬架性能评价的有效性,本文中采用该方法对悬架性能进行评价。
乘坐舒适性评价函数定义为
(12)
(13)
低频时车轮动载荷低谷持续的时间较长,对操纵稳定性和安全性有较大影响;随着频率的升高,车轮动载荷低谷持续时间逐渐缩短,对操纵稳定性和安全性的影响也越来越小。基于车轮动载荷的这种频率差别,定义操纵稳定性评价函数:
(14)
基于式(12)和式(14)定义的评价函数对3种不同悬架的车辆进行乘坐舒适性和操纵稳定性评价。评价所取频率范围为0.5~25Hz,基本可反映出车辆悬架振动的全部主要动力学特征,其结果如图10所示。与被动悬架相比,SH控制可使车辆乘坐舒适性提高14.03%,操纵稳定性提高9.89%;而FA控制下,车辆乘坐舒适性和操纵稳定性分别提高了26.33%和10.45%,均优于SH控制。由此进一步印证了算法的有效性。
4 结论
本文中基于天棚和加速度阻尼控制算法频响特性分析,提出了一种基于提高车辆乘坐舒适性的联合反馈半主动控制算法,并对影响算法性能的参数进行了分析和优化。以天棚控制作为参考分别从时域和频域的角度对设计的控制算法展开了分析和评价,得到如下结论。
(1) 联合反馈半主动控制能够在反映车辆振动特性的绝大部分频段显著抑制车身垂向加速度,大幅提高乘坐舒适性,同时有效兼顾了操纵稳定性。
(2) 联合反馈半主动控制有效地抑制了低频区的悬架动挠度,防止车身共振的同时降低了撞击悬架限位的概率。
联合反馈控制算法简单实用、物理意义清晰、性能优越、计算量小,且通过参数调整能够适应不同控制目标的需要,因此适用于车辆振动控制。
[1] 喻凡,于秀敏.汽车系统动力学[M].北京:机械工业出版社,2008.
[2] 董小闵,余淼,廖昌荣,等.汽车磁流变半主动悬架频域加权次优控制研究[J].系统仿真学报,2006,18(11):3183-3186.
[3] 赵云堂,陈思忠,冯占宗,等.磁流变半主动悬架的天棚控制方法研究[J].汽车工程学报,2011,1(2):127-133.
[4] Sergio M Savaresi, Cristiano Spelta. Mixed Sky-Hook and ADD:Approaching the Filtering Limits of a Semi-Active Suspension[J]. ASME Transactions: Journal of Dynamic Systems, Measurement and Control,2007,129(4):382-392.
[5] 杨建伟,黄强,李伟,等.基于加速度阻尼控制的半主动悬挂研究[J].铁道学报,2006,28(5):21-27.
[6] Sergio M Savaresi,Cristiano Spelta. A Single-Sensor Control Strategy for Semi-active Suspensions[J]. IEEE Transactions on Control Systems Technology,2009,17(1):143-152.
[7] Chen H, Liu Z Y, Sun P Y. Application of Constrained H∞ Control to Active Suspension Systems on Half-car Models[J]. Journal of Dynamic Systems,2005,127(3):245-254.
[8] Ercan Y. Optimal Control of Half-car Vehicle Model with a Variable Damping Semi-active Suspension[C]. Proceedings 10th Int. Conf. on ER, MR,2006:431-437.
[9] 颜文俊,董丹,王维锐,等.非线性半主动悬架系统模糊控制策略[J].控制工程,2011,18(6):941-946.
[10] 姚嘉凌.车辆磁流变半主动悬架系统理论和试验研究[D].南京:南京林业大学,2009.
[11] 王维锐,吴参,潘双夏,等.车辆半主动悬架负刚度控制策略研究[J].浙江大学学报(工学版),2009(6):1129-1133.
[12] 蒙文流,韦树英,罗会来.半主动控制的研究现状及其工程应用[J].广西科学院学报,2008,24(3):231-237.
[13] 周长城.车辆悬架设计及理论[M].北京:北京大学出版社,2011.
[14] 彭志召,张进秋,张雨,等.车辆半主动悬挂的频域控制算法[J].装甲兵工程学院学报,2013,27(4):36-42.
An Associated Feedback Semi-active Control Algorithm for Vehicle Suspension
Zhang Jinqiu1, Zhang Lei1, Peng Zhizhao1, Jiang Lei2& Wang Xingye1
1.BrigadeofEquipmentTrialandTraining,AcademyofArmoredForcesEngineering,Beijing100072;2.BaichengOrdnanceTestCentreofChina,Baicheng137001
In order to improve the ride comfort of vehicle, a semi-active control algorithm based on the associated feedback control of vehicle body’s velocity and acceleration is proposed based on the analysis on the amplitude-frequency characteristics of vehicle body’s acceleration with typical algorithms. Then with sky-hook semi-active control algorithm as reference, the performance of control algorithm is analyzed and evaluated. The results show that the control algorithm proposed can achieve effective control on suspension performance indicators such as the acceleration of vehicle body, the dynamic deflection of suspension and the dynamic load of tires, and hence improve both the ride comfort and the handling stability of vehicle. The algorithm is simple and practical with less computation efforts required, suitable for the vibration control of vehicle suspension system.
suspension system; control algorithm; associated feedback control; semi-active suspension
原稿收到日期为2014年3月24日。
