基于C-V 模型的木材缺陷重建图像特征提取1)
2015-04-03刘嘉新吴彤王克奇
刘嘉新 吴彤 王克奇
(东北林业大学,哈尔滨,150040)
应力波图像重建技术,是在不破坏木材本身的前提下将木材内部断层进行重建,从而获取木材的内部状况信息;木材无损检测技术是多样化的,而应力波检测法无疑是木材的无损检测技术中最值得深入研究的技术[1]。应力波的传播距离远,抗干扰能力较强,不受被测木材形状和尺寸的限制,其检测方法省去了耦合剂,并且对环境因素要求不高,设备便于携带。虽然应力波技术在国外已经得到广泛研究和应用,而我国对于这方面研究还不够完善。安源[2]提出的点速度模型与线速度模型对缺陷面积较小的木材无法进行判断,并且重建后的图像分区较大、轮廓不清晰,仅能对木材中具有缺陷进行鉴定,因此需要将其模型进行进一步优化;杨学春等[3]进行的木材应力波二维成像研究,也仅是验证了基于射线追踪的慢度传播模型理论知识。冯海林等[4]研究了应力波在木材中传播过程,给出了木材中应力波传播的弹性常数之间的关系,对木材中的应力波传播进行了计算。浙江林学院的学生在挑战杯比赛中设计了一款木材无损检测仪,但是该检测仪仅能显示木材内部应力波的传播速度,需要对比同树种相关数据来判断内部有无缺陷,而不能将木材的断层面显示出来。
本文利用的是细胞的反向投影法对木材的断层图像进行重建,然后进行图像处理,对重建后的图像进行特征提取、计算其误差率,证实算法适用于木材缺陷的检测。
1 缺陷图像的重建
本文使用的设备是匈牙利FAKOPP 微妙计,实验采用多点依次测量时间值,在变换测量点数量的基础上变换模型,得到速度矩阵;利用MATLAB 实现二维图像的重现,在提取特征值后对比重建图像质量。
本文实验使用8 个应力波传感器,传感器由尖峰或螺钉连接到木材。传感器用来发射、接收信号,然后记录其微秒计测量到的传播时间。应力波基于声层析成像的分辨率,主要取决于传感器的数量和施加的反演技术[5]。
1.1 缺陷重建计算方法
如果将传感器组成的多边形进行细胞分裂,并且假定每个单元的慢度是恒定的,通过矢量在矩阵表示得到的s 和t 的矩阵M。
式中:sj表示第j 个单元的慢度(j=1、…、n);ti表示第i 条路径对应的传感器间测得的时间(i=1、…、m);lij表示第i 条路径通过细胞j 所在部分的长度(i=1、…、m,j=1、…、n)。

这里的重建方法计算目标是得到向量s,因此需要向量t 变得尽可能接近真实值,以得到传播时间的数据,sj由公式(3)计算。式中:sj表示交叉于第j 个单元上所有路径对应慢度的平均值(j=1、…、n);si表示第i 条路径上对应的应力波传播慢度(i=1、…、m)。
利用公式(3)得到的数据进行图像重建。首先使用FAKOPP 测得的时间转换为射线方向速度,得到速度矩阵,利用MATLAB 实现二维图像的重现。
1.2 数据采集与重建结果图
本文采用含有裂纹的柳木木材、含有空洞的椴树木材样本进行实验。测试温度为常温25 ℃、含水率为10.5%的实验条件下,选取8 个测量点,利用速度公式计算木材内部速度数据(见表1)。

表1 椴树、柳木各测量点间传播速度 m·s-1
利用MATLAB 反演的缺陷成像图在细胞密度为12×12 时进行绘制;在对速度阈值的选取上,则选取了健康树木速度在下降15%与10%的情况下,对每个细胞单元的速度进行不同颜色赋值。木材样本见图1,木材缺陷的显现见图2。

图1 木材样本图像
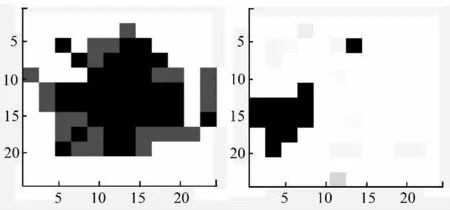
图2 木材断层重建图像
2 木材缺陷图像预处理与特征提取
通常情况下,需要借助提取图像特征的方法对图像进一步描述,图像特征可代表提取的目标区域特征,而在特征提取中最重要的部分是提取其特征的量值[6]。图像的形状特征,通常有两种情况:轮廓特征、区域特征。
2.1 结果图预处理
实验观察到利用细胞的反向投影法得到的缺陷图像过于锐利,因此使用了形态学中的开运算进行操作,这种运算是由膨胀和腐蚀组合而成的复合运算[7]。
对整数空间Z 中的集合A 和集合B,B 对集合A 的开启记为A·B。即:开启操作时,先用结构元素B 对图像A 进行腐蚀,然后用B 对腐蚀结果做膨胀处理[8]。MATLAB 图像处理中使用函数imopen实现图像的开运算,语法格式如下:
IM2=imopen(IM,SE)
IM=imopen(IM,NHOOD)
其中:IM2=imopen(IM,SE)用结构元素SE 对灰度图像或二值图像IM 执行开运算。IM=imopen(IM,NHOOD)对图像IM 执行开运算,NHOOD 是包含0 和1 的矩阵,定义了开运算所用的结构元素。
将得到的8 个测试点的缺陷重建图像进行开启处理,得到的图像见图3。

图3 处理后的缺陷重建图像
2.2 图像分割处理
传统的C-V 模型是由D. Mumford 和J. Shah 提出的一个图像分割的目标函数。利用优化后的函数对图像进行不同性质区域的分割,并且用所得分割图像的误差比所有分割图像和原图像的误差都要小的算法进行图像分割,最小化能量方程为公式(4)。
但这种算法对于复杂图像的边界难以准确判定。Ambrosio 等提出了针对原模型使用各向同性线性扩散作恢复的能量函数,Teboul 等提出利用非线性保边正则化的能量函数,但这些算法的计算量极大,得到的结果非常复杂,实际应用不强[9]。
本文应用基于C-V 模型水平集的图像分割模型,对重建后的缺陷图像进行分割[10]。为了能够更加精准的确定重建图像中缺陷边界,将其更加完整的分割,本文采用的是Chan 和Vese 提出的简化的Mumford-Shah 模型[11]。该模型具备全局最优分割特性,不涉及梯度信息,在面积项A(I(C))和长度项L(C)的共同作用下,通过最小化能量函数演化曲线,使得运动曲线接近物体的边缘[12-14],C-V 模型水平集的能量函数为公式(5)。

式中:v≥0,μ≥0,且λ1、λ2均为大于0 的常数,且均为各个能量的权正系数。一般λ1=λ2=0,v=0。C是演化曲线,定义ø0为初始曲线C0的符号距离函数,用水平集函数表示曲线C。

由此可以得到C-V 模型算法的处理步骤,流程图见图4。

图4 C-V 模型算法流程图
基于C-V 模型水平集的图像分割,采用手动方式确定一定距离长度作为半径,构成轮廓曲线圆,进行曲线演化运动,获得初次分割效果图。然后,对其进行形态学处理操作,首先标注连通对象,计算标注面积,删除小面积区域,去除非目标区域的干扰;再结合开闭操作删除小对象,最后应用canny 算子边缘检测获得二值图像边缘轮廓线[15-17]。图像的分割结果见图5。

图5 C-V 模型分割结果图
迭代次数为n=16。从分割结果看出,获得的目标区域较完整和精确,对重建图像中树木空洞缺陷与裂纹缺陷都具有一定的分割效果;对分割后的图像做HSV 亮度识别,在RGB 中识别红色,将分割线边缘轮廓识别出来后如图6 所示。

图6 分割线轮廓图
对比木材样本的空洞缺陷,识别到的缺陷轮廓边缘符合样本中的木材空洞区域,进一步证实了该算法的可行性。
2.3 图像拟合度计算
图像拟合度(T),是由重建图像检测的缺陷面积对比木材缺陷实际面积得到的;相对误差率(V),是指木材重建图像中缺陷面积与实际缺陷面积之间的偏离程度,计算公式见式(7)、式(8)。

式中:Sz为木材缺陷的实际面积;St为检测出的木材缺陷面积。当图像拟合度越接近100%,同时误差率越接近0 的情况下,检测出的缺陷的精度值越高。
首先对木材断层重建图像进行开启操作,接着对其灰度处理;然后用直方图累加统计方法,将其中缺陷部分的像素点累加,得到缺陷部分的面积。重建图像本身是正方形,在进行木材断面面积计算时,需要考虑所占百分比。由于重建正方形图像的边长等于重建木材断层面圆的直径,因此取78.54%的图像面积。图7 显示了重建图像由基于灰度图像所得到的累加直方统计,将其与木材缺陷真实面积进行对比,结果见表2。
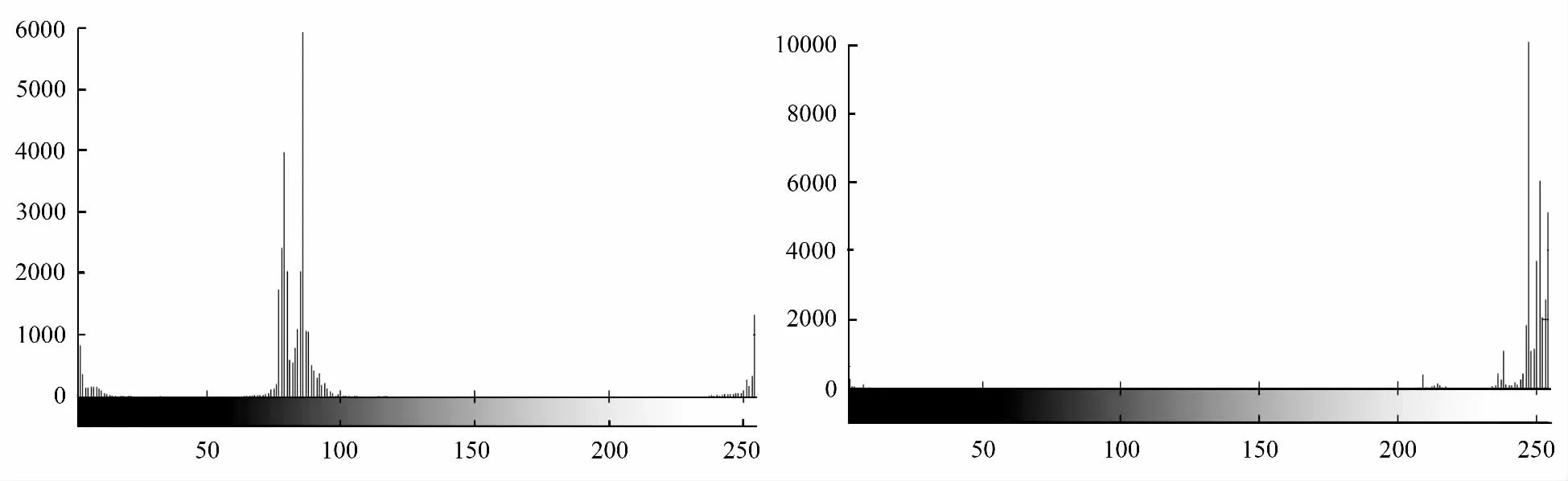
图7 重建图像直方图统计

表2 重建后图像指标对比
从重建图像的拟合度指标可见:该模型仅对木材内部空洞缺陷的重建效果较好,误差率可以达到0.18;对裂纹没有较高的重建拟合度。
3 结论
本文提出了一种基于木材断层重建的缺陷图像特征提取方法,提高了重建图像的智能化处理水平。
基于细胞反演法的图像重建中,FAKOPP 测得的时间值能够较为精确的反演出木材中缺陷的位置与大小,为以后进一步的将模型算法植入嵌入式系统中,为木材缺陷在线检测提供了技术条件。
基于C-V 模型水平集的图像分割,利用该模型对重建的木材图像腐朽面积进行分割计算,确保了高效率的目标区域提取。
本文最后对重建图像的拟合度进行了比较,为了能够提高木材缺陷重建的质量,增加测试点可解决该问题,为提高木材缺陷检测仪的检测精度提供了参考数据。
[1] 杨洋,申世杰.木材无损检测技术研究历史、现状和展望[J].科技导报,2010,28(14):113-117.
[2] 安源.基于应力波的木材缺陷二维成像技术研究[D].北京:中国林业科学研究院,2013.
[3] 杨学春,王立海.应力波在原木中传播理论的研究[J].林业科学,2005,41(5):132-138.
[4] 冯海林,李光辉,方益明,等.应力波传播模型及其在木材检测中的应用[J].系统仿真学报,2010,22(6):1490-1493.
[5] Lin C J,Chang T T,Juan M Y,et al. Stress wave tomography for the quantification of artificial hole detection in camphor trees(Cinnamomum camphora)[J]. Taiwan Journal of Forest Science,2011,26(1):17-32.
[6] 杨德山.基于雷达图像的目标跟踪技术的研究[D].大连:大连海事大学,2013.
[7] 胡博.基于CUDA 的遥感图像运动目标检测[D].西安:西安电子科技大学,2013.
[8] 张涛,齐永奇.MATLAB 图像处理编程与应用[M].北京:机械工业出版社,2014.
[9] 韩培友,历亮,郝重阳.基于Mumford-Shah 模型的VHP 图像分割[J].计算机仿真,2006,23(9):179-183.
[10] 林大辉.基于图像的栗属树种分类技术研究[D].福州:福建农林大学,2009:25-27.
[11] 刘闽碧.基于视觉显著性和活动轮廓的图像分割[J].中央民族大学学报:自然科学版,2013,22(1):31-35.
[12] 李永军.基于C-V 模型水平集方法的彩色图像分割研究[D].苏州:苏州大学,2010.
[13] Osher S,Fedkiw R. Level set methods and dynamic implicit surfaces[M]. New York:Springer-Verlag,2002:34-67.
[14] 何宁.基于活动轮廓模型的图像分割研究[D].北京:首都师范大学,2009.
[15] 侯卫萍,王立海.数学形态学与Canny 算子在木材腐朽图像特征提取中的应用[J].森林工程,2011,27(2):28-30,87.
[16] 高攀.视频中运动对象的检测与提取[D].兰州:兰州理工大学,2012:20-22.
[17] 杨金刚.基于数学形态学的遥感图像边缘信息提取技术研究[D].成都:成都理工大学,2011:30-35.
