基于AMESim的驾驶员操纵装置阻尼特性研究
2015-04-03许志林
许志林,傅 强,万 明
(1.中航工业洪都,江西 南昌330024;2.驻320厂军事代表室,江西 南昌330024)
0 引 言
在电传飞行控制系统中,对驾驶员操纵装置的阻尼比提出了明确要求,国军标要求阻尼比ζ一般应在0.5~1之间。传统的设计方法中,针对阻尼器阻尼比的参数设定,需要通过繁杂的数学计算来分析合理的值,且需要反复进行迭代,数据量较大,很容易出错。本文利用LMS Imagine.Lab AMESim仿真软件对某一设定的驾驶员操纵装置进行建模及仿真分析。
1 驾驶员操纵装置参数要求
本文列举任意一例驾驶员操纵装置的横向操纵部分参数,进行仿真分析。理论参数假定设置如下:
启动力(操纵点处):8N;
横向最大操纵力:±50N;
阻尼比ζ:0.5~0.85
横向最大操纵位移(操纵点处):±50mm;
横向操纵点至横向载荷机构的传动比:230mm/ 60mm;
横向操纵点至横向阻尼器的传动比:230mm/ 60mm;
驾驶杆手柄/传动机构等等效至操纵点的质量:2 kg。
2 系统建模
驾驶员操纵装置主要由驾驶杆手柄、传动杆系、载荷机构和阻尼器等组成,建立如图1所示的系统模型,输入信号1模拟给驾驶杆提供的一个初始力,使驾驶杆保持在横向最大操纵位移处,在第1秒的时候开始释放。阶跃信号初始值设置为60,阶跃值为0,阶跃时间为1s。
等效质量块2为具有摩擦力和限位装置的模型,模拟限位装置、启动力(摩擦力)和传动机构的惯量。等效质量块2的参数设置为:
质量:2kg;

图1 驾驶员操纵装置建模
库仑摩擦力:0.5N;
静摩擦力:0.5N;
最低限制位移:-50mm;
最高限制位移:50mm;
其他值为默认值。
等效传动杆系3为模拟驾驶员操纵装置的传动比,L1端臂长设为230mm,L2端臂长设为60mm。
阻尼器4和等效弹簧载荷机构5共同组成驾驶员操纵装置的人感系统。等效弹簧载荷机构5的相关参数根据横向操纵参数计处获得。
3 阻尼器阻尼系数确定
阻尼器的阻尼系数一般为可调节值,为了使阻尼器的可调节参数设置于最佳区间,现使用批处理的方法来进行仿真分析。阻尼器阻尼系数的初步批处理数值见表1。操纵点T的批处理仿真结果见图2所示。

表1 阻尼系数的初步批处理数值 单位:N/(m/s)

图2 不同阻尼系数时的操纵点T批处理仿真时域曲线
根据超调量σ与阻尼比ζ的关系式:

得:
利用AMESim后处理功能,得出变阻尼系数情况下的系统阻尼比结果如图3所示。
根据后处理结果可得出,在给定的条件下,阻尼器的阻尼系数范围在600~750 N/(m/s)之间时,可实现阻尼比在0.5左右;阻尼器的阻尼系数在1950 N/ (m/s)左右时,可实现阻尼比为0.85。
再通过缩小间隙,分别求解两极限值的的阻尼比,可知,阻尼比为0.5时,阻尼器的阻尼系数为670 N/(m/s);阻尼比为0.85时,阻尼器的阻尼系数为1880 N/(m/s)。因此,在其他条件一定的情况下,当阻尼器的阻尼系数在670 N/(m/s)~1880 N/(m/s)之间时,系统阻尼比在0.5~0.85之间,系统的阻尼比随着阻尼器的阻尼系数的增大而增加。

图3 不同阻尼系数后处理阻尼比结果
4 系统质量对阻尼特性的影响分析
前面已对既定的模型分析得出了比较合理的阻尼系数范围,本节设定阻尼系数为一给定常量800N/ (m/s),将等效质量列为变量来分析质量变化对阻尼特性的影响,等效质量的批处理数值见表2,批处理仿真时域曲线见图4。
利用AMESim的后处理功能,得出变等效质量情况下的系统阻比如图5所示。
综合时域曲线和后处理结果可知,在阻尼系数为恒值时,系统阻尼比随着系统等效质量 (转动惯量)的增加而减小。

表2 等效质量的批处理数值 单位:kg

图4 变等效质量的操纵点T批处理仿真时域曲线
5 系统摩擦力对阻尼特性的影响分析
5.1 系统静摩擦力对阻尼特性的影响分析
设定阻尼系数为一给定常量800N/(m/s),等效质量也为一给定常量2kg,动摩擦力设为0.5N,静摩擦力列为变量,分析静摩擦力变化对阻尼特性的影响,静摩擦力的批处理数值见表3(批处理参数值设置时考虑了静摩擦力不应小于动摩擦力),批处理仿真时域曲线见图6。
利用AMESim的后处理功能,得出变静摩擦力情况下的系统阻比如图7所示。

图5 变等效质量后处理阻尼比结果

表3 静摩擦力的批处理数值单位:N

图6 变静摩擦力的操纵点T批处理时域曲线
由批处理的时域曲线和后处理结果可知,在其他参数为恒值时,在系统静摩擦力逐渐增加的过程中,系统阻尼比不发生变化。

图7 变静摩擦力后处理结果
5.2 系统静摩擦力对阻尼特性的影响分析
设定阻尼系数为一给定常量800N/(m/s),等效质量也为一给定常量2kg,静摩擦力设为5N,动摩擦力列为变量,分析动摩擦力变化对阻尼特性的影响,动摩擦力的批处理数值见表4(批处理参数值设置时考虑了静摩擦力不应小于动摩擦力),批处理仿真结果见图8。
利用AMESim的后处理功能,得出变动摩擦力情况下的系统阻尼比如图9所示。
由批处理的时域曲线和后处理结果可知,在其他参数为恒值时,系统阻尼比随着动摩擦力的增加而增加。

表4 动摩擦力的批处理数值 单位:N

图8 变动摩擦力的操纵点T批处理时域曲线

图9 变动摩擦力后处理结果
6 系统启动力(预载)对阻尼特性的影响分析
设定阻尼系数为一给定常量800N/(m/s),等效质量为一给定常量2kg,静摩擦力设为0.5N,动摩擦力也为0.5N,分析启动力变化对阻尼特性的影响,启动力的仿真数值见表5。
仿真结果见图10,利用AMESim的后处理功能,得出变启动力情况下的系统阻比如表6所示。
由仿真结果可知,在其他参数为恒值时,系统阻尼比随着启动力的增加而逐渐减小。

表5 启动力的仿真数值 单位:N
7 结 论
本文研究了一种利用AMESim软件提供快速建模仿真分析驾驶员操纵装置的阻尼器参数的方法,在系统其他参数恒定的情况下,驾驶员操纵装置的系统阻尼比:
1)随系统质量的增加而增加;
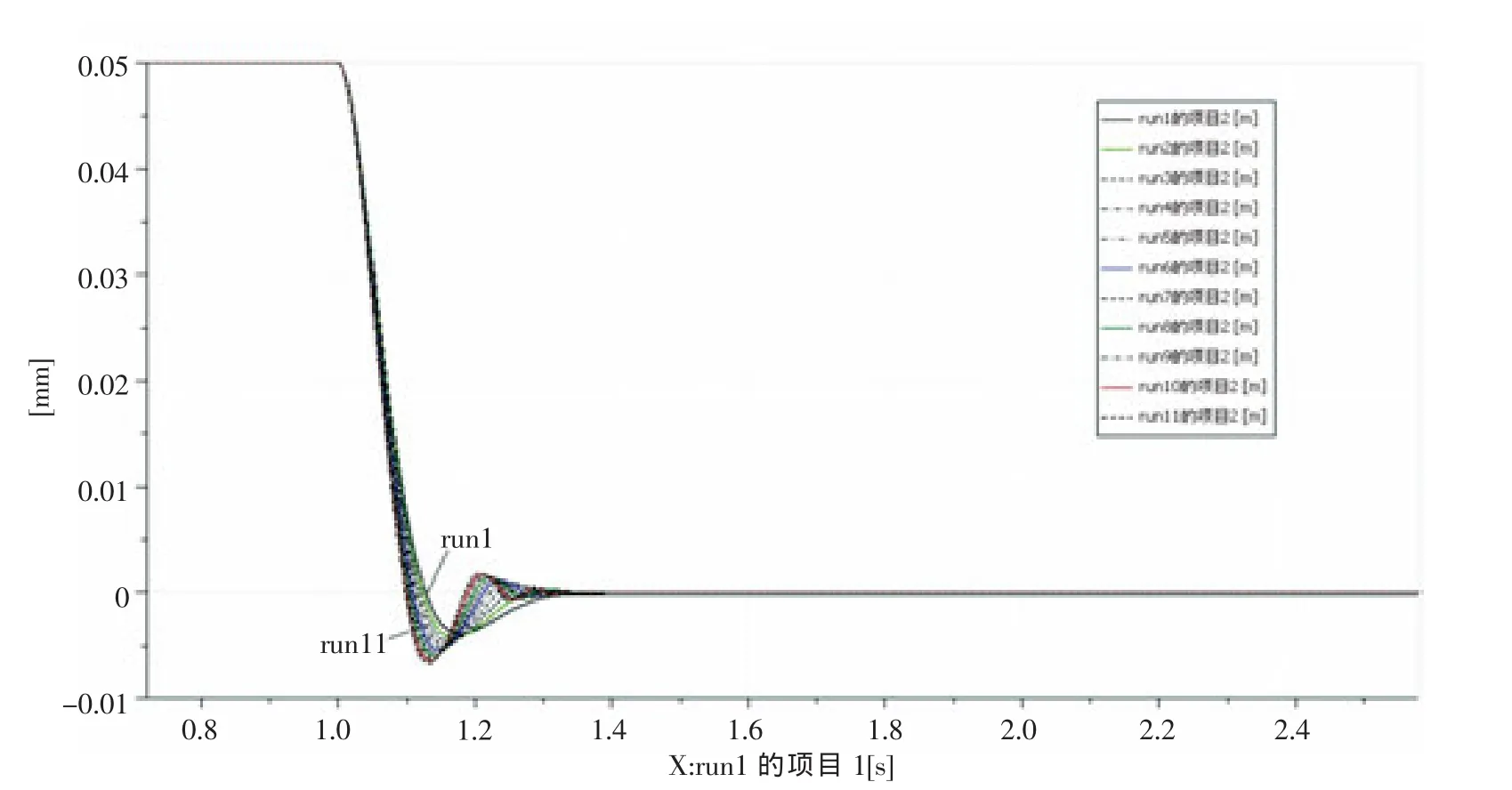
图10 变启动力(操纵点T)仿真分析

表6 变启动力的仿真结果
2)随阻尼器阻尼系数的增加而增加;
3)与系统的静摩擦力无关;
4)随系统动摩擦力的增加而增加;
5)随系统动启动力的增加而减小。
[1]王永熙.飞机设计手册 第12册.飞行控制系统和液压系统设计.北京:航空工业出版社,2003.
[2]胡寿松.自动控制原理.北京:科学出版社,2001.
[3]付永领,祁晓野.LMS Imagine.Lab AMESim系统建模和仿真参考手册.北京:北京航空航天大学出版社,2011.
