直升机载光电平台目标定位误差分析
2015-03-31王东鹤陈定荣张绍君白继清魏仲慧
王东鹤,陈定荣,张绍君,白继清,何 昕,魏仲慧
直升机载光电平台目标定位误差分析
王东鹤1,陈定荣2,张绍君3,白继清1,何 昕1,魏仲慧1
(1. 中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2. 中国人民解放军总参陆航部驻上海地区军代室,上海 200233;3. 吉林省九台市土们岭农机站,吉林 长春 130000)
直升机载光电平台由于安装了阻尼减振器,使机体与光电平台间引入相对角位移,工程中将此角位移等效为简谐振动或直接忽略此角位移的存在,深入研究了角位移对直升机载光电平台目标定位精度的影响。首先,对安装阻尼减振器后的直升机载光电平台相对角位移特点进行介绍;其次,建立了目标定位误差方程;最后,仿真给出了此相对角位移对光电平台目标定位精度的影响。仿真结果表明,光电平台与直升机体间的相对角位移也是当前条件下影响光电平台目标定位的主要误差因素之一。
直升机载光电平台;角位移;误差分析;目标定位
0 引言
直升机载光电平台作为一种优秀的侦察、探测系统,在地质勘测、灾害预报、军事侦察与打击毁伤评估等诸多领域发挥着越来越重要的作用。在未来战场侦察与打击一体化的发展趋势下,光电平台的引导与目标定位精度是关键所在。国外的光电平台内部集成高精度IMU,平台的视轴稳定、引导与目标定位精度很高;相比之下,国内装备的光电平台由于技术原因需要协同光电平台和载机的GPS及INS数据实现相同的功能。一方面,光电平台作为成像设备,需要安装阻尼减振器来隔离直升机涡桨发动机高速旋转及振动耦合造成平台成像像质下降的问题;另一方面,由于阻尼减振器的存在,直升机姿态等外部因素的影响极易使光电平台与机体间产生微小的相对位移,从而造成目标定位精度下降。文献[1]针对机载光电平台目标定位与误差分析进行过详细而深入的研究,分析了引起机载光电平台引导及目标定位误差的主要因素,为机载光电平台工程化过程中误差如何分配提供了理论基础。文献[2]通过平台测量设备,结合载机GPS和航空姿态测量系统进行目标定位,同时讨论了机载光电平台自主定位的技术优势及其特点;文献[3]在分析光电跟踪测量设备组成基础上,全面系统讨论了影响测量精度的各方面因素,通过坐标变换和构建测量方程,进行测量误差分析和误差分配;文献[4]在不依赖激光测距机或无线电测高仪条件下,通过飞机与地面的相对高度推算飞机与目标之间的斜距,利用空间坐标变换,在平坦地势条件下对地面目标进行准确定位。但以往针对光电平台引导与定位分析的过程中直升机机体与平台间的相对角位移仅通过等效为简谐振动或直接忽略了此相对角位移,造成平台探测精度的下降。针对各种影响光电平台目标定位精度的误差因素,论文重点研究采用阻尼减振器后光电平台与直升机机体间的相对角位移对平台目标定位精度的影响。
1 目标坐标系定义
1.1 坐标变换原理
空间直角坐标系中,任意一个矢量均可用沿三坐标轴单位矢量、与的线性组合表示=++,且、、称为坐标系的基底。如果改变空间内基底而保持基底之间的互不共线的关系,矢量亦可以在通过新基底′、′与′的线性组合。由基底、与与′、′与′分别确定了两组空间直角坐标系之间的关系。为了能够更完整的表示坐标系各种变换关系,通常增加一维分量将三维空间变齐次坐标变换关系。
所有的旋转矩阵表达式均为正交矩阵,即变换矩阵始终满足-1=′。上述几种变换的组合几乎涵盖了常用的坐标变换,通过矩阵的乘法规则即可实际坐标系之间的变换。
1.2 坐标系定义
光电平台的引导与目标定位是相反的两个过程。论文仅以研究目标定位过程为例说明直升机机体与平台间相对角位移对平台引导及目标定位精度的影响。
为了分析目标定位精度的误差因素,首先要建立坐标系统。根据实际定位过程并忽略各种非主要误差因素的影响,共建立6种坐标系统。
1)目标坐标系统(o,o,o)
目标坐标系统用于确定目标自身的信息。实际上,光电平台的目标距离均较远,可以将目标作为质点处理,即目标在其自身坐标系下的坐标值始终为(0, 0, 0, 1)¢。
2)光电平台坐标系统(t,t,t)
当光电平台与载机无角位移时,以载机行进正前方为光电平台坐标系统t轴,以载机的正右方为t轴,t轴与t轴、t轴成右手坐标系统。
3)直升机机体坐标系统(p,p, zp)
直升机机体坐标系统由机体自身确定。以机体的正前方向为p轴,以机体的正右方为p轴,p轴与p轴、p轴成右手坐标系统。显然,如果光电平台与直升机以刚性相接或光电平台与机体间无任意角位移时,光电平台坐标系与直升机机体坐标系之间仅通过简单的平移变换即可得到。
4)直升机航迹坐标系统(r,r,r)
航迹坐标系统由此时直升机在某时刻所处的地理位置决定。其中,r为航迹方向,r为指向天顶方向,r轴与r轴、r轴成右手坐标系统。同样,如果直升机没有方位、俯仰与横滚等姿态变化,直升机航迹坐标系与直升机机体坐标系之间仅通过简单的平移变换即可得到。
5)大地直角坐标系统(g,g,g)
大地直角坐标系以地球质心为坐标原点,g为由原点指向地球赤道与格林尼治子午圈的交点,g指向地球的北极方向,g轴与g轴、g轴成右手坐标系统。
6)地球坐标系统(,,)
地球坐标系统与大地直角坐标系统的定义完全一致,只不过任意点在地球直角坐标系与大地直角坐标系统中的表示方法不一样。其中,、、分别是将大地直角坐标系下的g、g、g值转化为目标的经度、纬度与大地高程。
2 目标定位误差方程的建立
任意一点从地球坐标系到大地直角坐标系的相互转换关系及大地直角坐标系到地球坐标系的坐标变换将参照相关GPS文献,这里将不再赘述。大地直角坐标系到地球坐标系的计算一般有迭代法与直接法两种,对于精度要求并不是极其严格时,直接的计算方法一般可以满足要求。
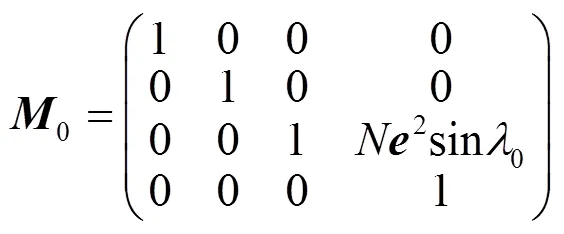
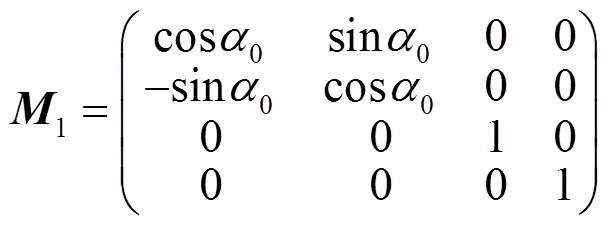
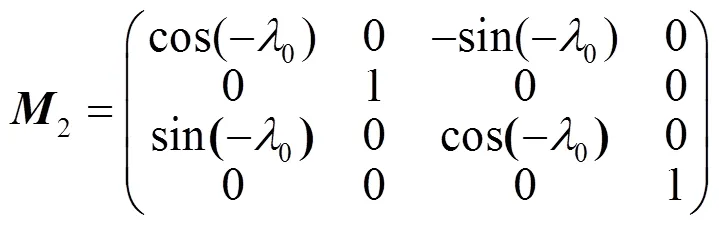
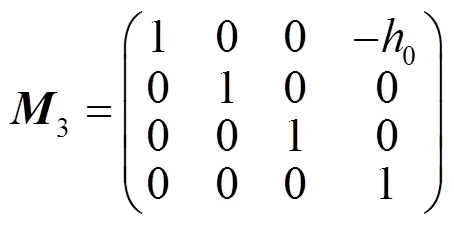
目标位置从大地直角坐标系到航迹坐标系的坐标变换关系需要用到载机所处位置的GPS数据。假定此时载机的地球坐标下的位置为(0,0,0),且0、0、0依次为载机的经度、纬度与大地高程,则大地直角坐标至航迹坐标系通过如下变换过程得到:首先,沿g平移-2sin0;接着分别沿g、g旋转0与-0;最后,沿旋转后的g平移0。其变换矩阵如公式(1)~公式(4):
从而任意点在直升机航迹坐标系下的坐标(r,r,r)到直升机机体坐标系下的坐标(p,p,p)的变换关系为:

目标位置从直升机航迹坐标系到机体坐标系的坐标变换关系满足:依次绕r、r、r分别旋转角度rp、rp与rp,其对应的变换矩阵4、5、6的表达式如公式(6)~公式(8)所示:
从而任意点在直升机航迹坐标系下的坐标(r,r,r)到直升机机体坐标系下的坐标(p,p,p)的变换关系为:

目标位置从机体坐标系到平台坐标系的坐标变换关系满足:依次绕p、p、p分别旋转角度pt、pt与pt,其对应的变换矩阵7、8、9的表达式如公式(10)~公式(12)所示:
从而,任意点在直升机机体坐标系下的坐标到平台坐标系下的坐标间满足:

如果将光电平台的目标作为质点处理,则目标在其自身坐标系下的坐标值为(0, 0, 0, 1)¢。目标坐标系由平台坐标系旋转特定角度并平移后得到,则目标在平台中的坐标表示为:

根据坐标变换的原理,目标在大地直角坐标系下的坐标值可以由、0、1、2、3、4、5、6、7、8、9变换得到,即:
由公式(1)~公式(15)可以计算得到目标的地球坐标系坐标值,从而实现光电平台的目标定位。
3 目标定位误差因素分析
3.1 直升机坐标位置误差
直升机的自身位置(0,0,0)将由GPS等设备确定。GPS(全球定位系统)是一种全天候、全天时、高精度全球定位系统,由美国的相关专家在20世纪70年代提出。GPS系统民用部分使用粗码(C/A码)动态定位精度超过100m,且免费向全球用户开放;精码(P码)仅限美军或美国机要部门使用,动态定位精度10m以内。目前,高精度的导航定位系统向GPS与INS组合定位方向发展,融合了GPS精度高但数据更新频率慢与INS数据实时性好但是陀螺累积误差大的特点,复合导航定位系统能够大大提高定位精度。目前,美国Honeywell公司的精密导航定位系统精度优于0.5m,满足了军民生产需要[5]。
3.2 直升机机体与平台间相对角位移误差
由于阻尼减振器的存在引起的直升机机体与光电平台间的无规律角位移是论文研究的重点。如果抛开刚性连接与工程上通常采用的阻尼减振器,最好的办法是使用无角移减振器以消除角位移对引导与定位产生的不良影响,使用无角位移减振器后直升机与平台间的相对角位移可使用三轴的正弦振动替代[6]。
工程装机前,不同的直升机其振动振幅与角速率均需要根据具体的机型实际测定,此过程过于费时费力,因此无角位移减振器在光电平台中极少使用。如果采用阻尼减振器时,直升机机体与光电平台间采用阻尼减振器后其相对角位移一般不会超过3°,而很多时候此微小角位移容易被工程人员忽略,这也势必会造成平台引导与目标定位精度下降。
3.3 直升机自身姿态的误差
直升机姿态由直升机上安装的POS等设备确定,用以敏感直升机的俯仰、偏航与横滚角,以便确定直升机坐标系与航迹坐标系的关系。加拿大Applanix公司的POS设备经历几代发展,从早期的310系列到目前的610系列,精度已经达到了很高[7]。
3.4 光电平台传感器误差
光电平台自身的方位与俯仰角是依靠安装在光电平台轴框上的光电编码器得到的。与其它测量方法相比,光电编码器测角精度高,误码低,体积小。如今的光电编码器已经由传统的码盘式光电编码器向容栅式、图像式光电编码器发展[8]。目前广泛使用的容栅式光电编码器测角误差优于0.001°。
光电平台内部的成像载荷存在视轴与横轴不正交时产生的照准差,实际工程中可以通过视轴校正的方法有效校正,而视轴晃动等误差等本论文将不再考虑;另外,假定光电平台引导与定位的过程中目标始终处于视场的中心位置,即视轴像面偏差理想化。光电平台与目标间的距离通过平台内部安装的激光测距机得到。目前,工程中使用的高精度的激光测距机测距误差一般优于1m。
3.5 光电平台目标定位误差方程
分别将直升机自身位置误差D0、D0与D0,平台测角编码器误差D与D,直升机姿态测量误差Drp、Drp与Drp、平台与直升机机体间相对角位移误差Dpt、Dpt与Dpt,激光测距机误差D等误差因素代入公式(15),得到含误差项的变换矩阵′、0′、1′、2′、3′、4′、5′、6′、7′、8′与9′。结合公式(1)~公式(15),可得到含有误差项的光电平台目标定位误差方程:

4 目标定位误差仿真结果
对于目标定位公式(15)与含有误差项的目标定位公式(16)自变量均较多,使用全微分的分析方法进行误差分析显然不太现实。相比之下,基于蒙特卡罗方法统计实验误差分析在处理多变量误差分析问题时具有明显的优势,为光电平台目标定位误差分析提供了新的手段。如今,蒙特卡罗方法在分子结构模拟、目标追踪、天文观测中的假设检验等诸多领域得到了广泛的应用[9-12]。针对含有误差项的光电平台目标定位公式,结合蒙特卡罗误差分析方法,定义各种系统随机误差分布[9-11]与误差量(误差量由实际工程中使用的测量设备获得)如表1所示。
使用MATLAB中的随机数生成函数及各种误差的分布特性生成误差扰动随机数阵列。未加入平台与直升机间相对角位移扰动的目标定位误差方程即将公式(16)中的7′、8′、9′使用无误差项的7、8、9替代,即:

为了说明研究的相对角位移与平台目标定位精度的关系,使用表1中的各参数的名义值与蒙特卡罗方法生成的满足要求的正态或均匀随机数对公式(16)与公式(17)进行仿真。图1分别给出了引入相对角位移与未引入相对角位移时大地经度、大地纬度、大地高程等方向上目标定位精度仿真实验图分布。不难发现,在设定的目标参数与误差范围内,光电平台与直升机机体间的相对角位移对目标定位的高程影响较为明显,对目标纬度定位精度影响次之,对经度定位影响较小。

表1 定义系统随机误差分布
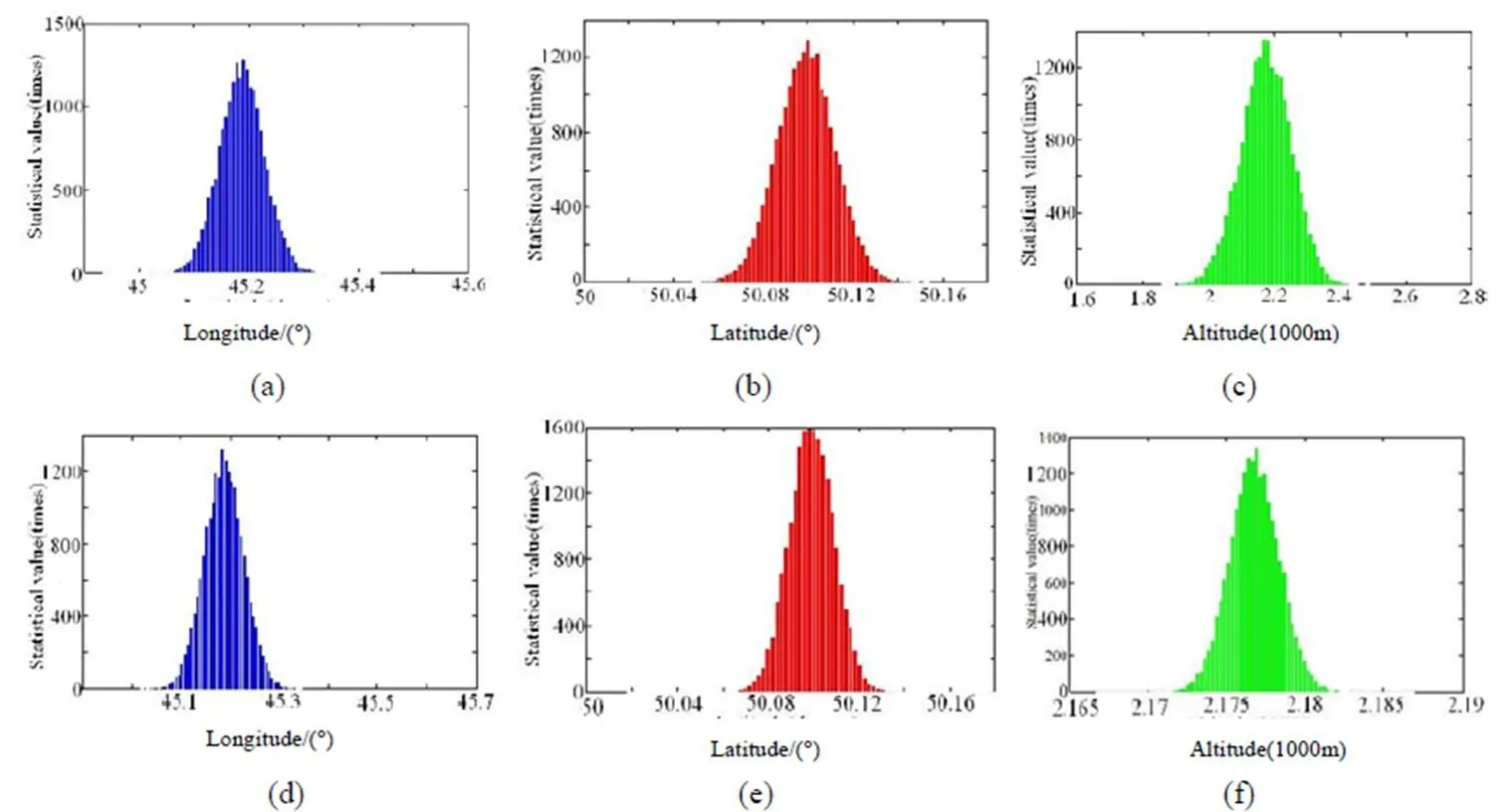
图1 引入相对角位移前后光电平台目标定位精度仿真实验图
同时,将论文研究的光电平台与直升机机体间相对姿态角控制在[-2°, 2°]范围内,分别将方位、俯仰或横滚角中的任意两个姿态角固定在0°、±1°、±2°时,目标经纬度和高程与第3个姿态角的关系如图2所示。
通过对比图1与图2不难发现,由于光电平台在实际安装中使用的阻尼减振器造成光电平台与直升机机体间的相对角位移对目标定位等相关测量精度的影响还是十分明显的,这也是论文开展相关角位移测量研究的原因所在。
5 结论
论文针对现阶段国内直升机载光电平台中采用的阻尼减振器后平台与机体间容易产生相对角位移这一事实,以平台目标定位为研究过程,将安装阻尼减振器后光电平台运动特性替代理想无角位移减振器时的目标定位方程,建立坐标系并分析了相对角位移对目标定位精度的影响,最后给出了仿真实验结果。结果表明,实际工程中平台与直升机机体间的相对角位移是影响平台引导与目标定位精度的主要因素,这也正是后续将开展光电平台相对角位移测量方面相关研究的主要原因。
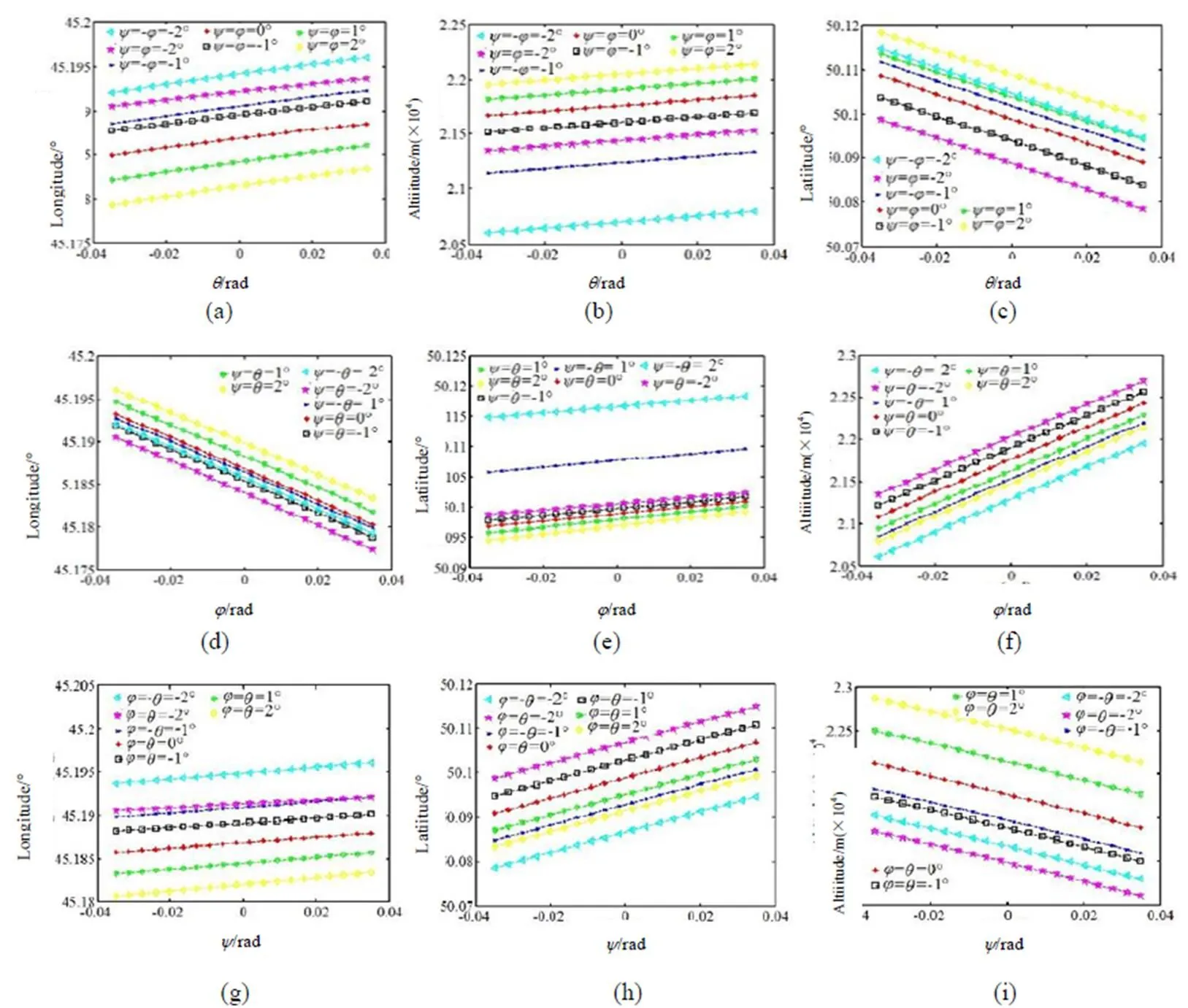
图2 光电平台相对姿态角与目标定位精度间关系仿真结果
[1] 檀立刚, 戴明, 刘晶红, 等. 机载光电测量设备目标自主定位误差分析[J]. 光学精密工程, 2013, 21(12): 3133-3140.
Tan Li gang, Dai Ming, Liu Jing guo, et al. Error analysis of target automatic positioning for airborne photo-electri measuring device[J]., 2013, 21(12): 3133-3140.
[2] 刘晶红, 孙辉, 张葆, 等. 航空光电成像平台的目标自主定位[J]. 光学精密工程, 2007, 15(8): 1305-1310.
LIU J H, SUN H, ZHANG B, et al. Target self-determination orientation based on aerial photoelectric imaging platform[J]., 2007, 15(8): 1305-1310.
[3] 王家骐, 金光, 颜昌翔. 机载光电跟踪测量设备的目标定位误差分析[J]. 光学精密工程, 2005, 13(2): 105-116. WANG J Q, JIN G, YAN CH X. Orientation error analysis of airborne opto-electric tracking and measuring device[J].., 2005, 13(2): 105-116.
[4] 林旻序, 乔彦峰, 戴明, 等. 单载荷航空吊舱目标定位方法研究[J]. 红外技术, 2011, 33(10): 593-597.
LIN M X, QIAO Y F, DAI M, et al. Research on single payload air pod target location method[J]., 2011, 33(10): 593-597.
[5] Meister O, Monikes R, Wendel J, et al. Development of a GPS/INS/MAG navigation system and waypoint navigator for a VTOL UAV[C]//IX, 2007, 6561: 1D01-1D10.
[6] 金光. 机载光电跟踪测量的目标定位误差分析和研究[D]. 北京: 中国科学院研究生院, 2006.
[7] Fang Jian-cheng, Lin shou-ting, Chen Ji-feng Yao. An accurate gravity compensation method for high-precision airborne POS[J]., 2014, 52(8): 4564-4573.
[8] Jucius D, Grybas I, Grigaliunas V, et al. UV imprint fabrication of polymeric scales for optical rotary encoder[J]., 2014, 56: 107-113.
[9] Avitzour. Stochastic simulation Bayesian approach to multi-target tracking[J]., 1995, 142(2): 41-42.
[10] Mihaylova L, Carmi A, Septier F, et al. Overview of Bayesian sequential Monte Carlo method for group and extended object tracking[J]., 2014, 25: 1-16.
[11] Shi Wenbin, Niu Ping, Zhang bo, et al. Monte Carlo simulations of the orbital elements and abundances of barium stars[J]., 2003, 27: 292-302.
[12] 孙辉. 机载光电平台目标定位与误差分析[J]. 中国光学, 2013, 6(6): 912-918.
Sun Hui,. Target localization and error analysis of airborne electro-optical platform[J]., 2013, 6(6): 912-918.
Targeting Error Analysis on Helicopter Photoelectric Platform
WANG Dong-he1,CHEN Ding-rong2,ZHANG Shao-jun3,BAI Ji-qing1,HE Xin1,WEI Zhong-hui1
(1. Changchun Institute of Optics, Fine Mechanics and Physics, Changchun 130033, China; 2.Chinese people’s liberation army office in Shanghai, Shanghai 200233, China; 3.Agro-machine of JiuTai ,Changchun,130000, China)
Due to the installation of the damper on the helicopter borne photoelectric platform, relative angular displacement is introduced between the body and the photoelectric platform. In projects it will be considered the same as angular displacement equivalent to harmonic vibration or be ignored, in this paper the positioning accuracy of angular displacement of helicopter borne photoelectric target platform is analyzed in-depth. First of all, the helicopter borne on the installation of damper photoelectric platform relative angular displacement characteristics are introduced. Secondly, the error equations of target location is established. Finally, simulation shows that the effect of the relative angular displacement of the photoelectric platform target positioning accuracy. The simulation results show that relative angular displacement between the helicopter and the photoelectric platform is one of factors of the main error of photoelectric platform targeting under current conditions.
angular displacement,optical platform helicopter,error analysis,targeting
V249
A
1001-8891(2015)11-0926-06
2015-06-25;
2015-10-19
王东鹤,(1983-),男,博士,从事测量控制领域数字图像处理研究,E-mail:66048299@qq.com。
