正交磁通门罗盘设计*
2015-03-30李宏宇张明瑞
李宏宇,李 昆,张明瑞
(哈尔滨工程大学,黑龙江 哈尔滨150001)
0 引 言
在航天航海环境中,测量运动载体的方位和姿态角时,如,流向、风向、航向、方位、海洋机器人水下运动姿态等都要用到方位传感器。由于工作环境条件十分恶劣,对传感器的要求也极其严格。以往常用的磁罗盘或惯性平台多为有触点部件,易于磨损,其工作可靠性较差,而且结构复杂、功耗大、使用维修都比较困难。磁通门罗盘能从根本上克服以上的缺点,能够提升测量准确度[1]。它无触点部件、无轴承、无永久磁铁,所以,具有功耗小、结构简单、可靠性高、寿命长、使用维修方便等特点。
本文根据实际工程的需要,改善了磁通门探头的制作工艺,设计了环型正交磁通门探头,并采用硅油作为阻尼液来保持探头的稳定性和水平。激励磁场均匀作用于磁芯上,呈正交的两路感应线圈产生的二次谐波信号可用于地磁方位角测量,并通过硬件实现和软件补偿方式保证航向角度值测量精度。磁通门罗盘具有数字输出的功能,可在ms 级时间内提供数据,方便与高速采样的计算机相连。
1 正交磁通门设计
磁通门罗盘是利用被测磁场中软磁材料在交变电场的饱和激励下其磁感应强度与磁场强度的非线性关系制作的测磁传感器[2]。磁通门探头制作过程中磁芯的选择和探头的制备工艺是影响磁通门罗盘的主要因素。
传统的正交磁通门制作是选择高导磁材料如坡莫合金作为磁芯,缠绕在无磁钢制作的骨架上,经高温煅烧、释放应力等过程使磁芯磁滞回线达到预定要求。采用非导磁性材料制作外壳,在外壳内部腔体中放入阻尼液以浮起磁芯骨架,激励线圈和感应线圈缠绕在外壳外部。本文主要对磁芯的制作工艺进行改善,选取聚四氟乙烯制作磁芯的支撑骨架,将磁芯处理后缠绕在骨架上并释放应力,同时在阻尼液的选取上能够节约成本。阻尼液的作用是使磁芯能够在一定程度上保持水平状态,无磁钢作为骨架时需选取密度较大的氟油作为阻尼液以浮起磁芯线圈,而聚四氟乙烯作为骨架时,所需阻尼液密度较小,可供选择种类繁多,价格低廉。磁通门探头示意图如图1。
2 磁通门二次谐波法原理
磁芯磁导率的变化对环境场起到滤波作用,相应的磁通量被调制并产生感应电势,这种器件称为磁通门探头,它能将环境磁场调制成偶次谐波感应电势,这就是磁通门现象[3]。
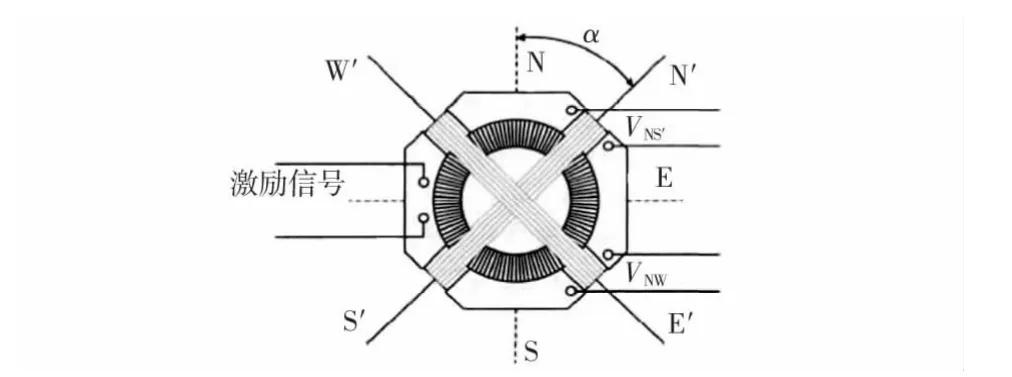
图1 正交磁通门探头简图Fig 1 Diagram of orthogonal fluxgate probe
铁芯的磁导率随激励磁场强度产生变化时,感应电势中会出现随被测环境磁场强度而变化的偶次谐波增量。理论上,任意偶次谐波电压都可以用来度量被测磁场,然而当饱和深度发生变化时,高次谐波分量的稳定性很差,并且谐波电压会随着谐波次数的增加而逐渐衰减,所以,通常都选择二次谐波法来测量被测磁场[4~8]。
被测磁场的磁场强度H0非常小,远小于饱和磁场强度Hs以及激励磁场强度幅值Hm,且当时,如施加激励磁场H=Hmcos2πft,二次谐波幅值简化后表达式为
式中 μ 为磁导率,W 为感应线圈匝数,S 为探头截面积。
正交磁通门输出信号为呈正交的X,Y 两路信号

3 硬件电路的实现
电路设计的整体包括磁通门激励电路、探头输出模拟处理部分、探头输出数字处理部分、输出显示部分。总体方案图如图2 所示。
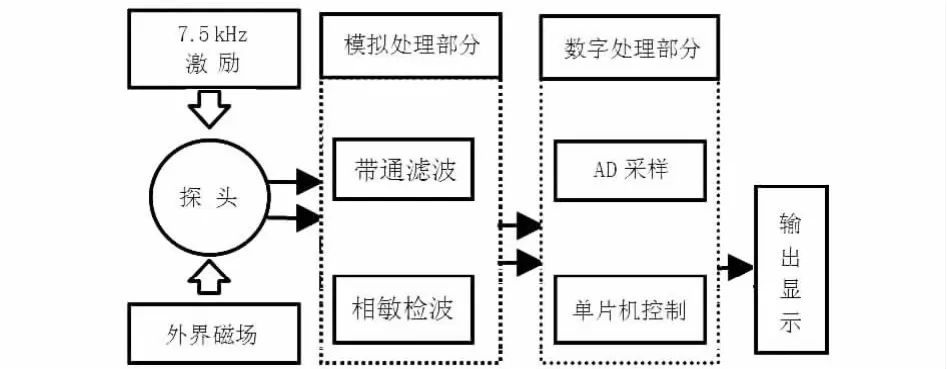
图2 硬件电路整体方案图Fig 2 Overall scheme of hardware circuit
1)激励电路
3.840 MHz 的晶振产生标准正弦波信号,CD4060 芯片分频得到标准的7.5 kHz 激励信号和15 kHz 检波信号。
2)模拟处理部分
a.带通滤波
用于提取输出信号中的二次谐波,基波和三次谐波是最大的干扰信号,因此,其性能直接影响系统的精确度。
b.相敏检波
通过标准15 kHz 方波对滤波器输出信号进行截取,进一步滤除干扰噪声,采用双向传输门实现。
3)数字处理部分
单片机控制AD7705(双通道全差分模拟输入)对X,Y 轴方向感应电动势进行采样进而求得方位角。
4)输出显示部分
输出水平航向角,并绘制曲线。
4 实验测试
4.1 实验数据
磁通门罗盘测试时用无磁转台作为标准角度尺,等角度转动,记录误差,实验数据如表1。

表1 实验数据Tab 1 Experimental datas
4.2 误差分析
影响磁通门罗盘精度的因素很多,主要分析以下因素造成的影响[8,9]:
1)探头固有零误差
误差主要由磁导材料的磁滞现象和特性曲线受干扰呈非对称性而引起,通常选用矫顽力较小的高导磁材料做成环形铁芯来减小。有效抑制和减小探头的噪声和固有零误差的措施为确保足够激励灵敏度和强度前提下,磁芯叠厚应尽量薄,这样,铁芯材料能充分饱和且铁芯内磁场均匀分布。
2)外部误差
激励信号的不对称分量即偶次谐波成分是引起外部误差的因素之一。为减少这一干扰,应采用高稳定度晶振,且在振荡电路与输出电路之间充分去耦。外界磁场的干扰也会产生外部误差,在实际应用中可以采用无定向结构或屏蔽措施防止外界磁体所产生的磁场影响。通常磁体对2 m外物质产生的磁场影响可忽略。
3)模拟电路不稳定引起的误差
作为模拟电路最重要部分的带通滤波器,它的性能直接影响测量精确度。对于基波,三次谐波的抑制作用和对本底噪声的限制作用是衡量滤波器性能的主要指标。移相电路也需要稳定可靠,能够准确移相,否则,会引起输出信号产生不必要的相移。因此,滤波器和移相电路所选用的元器件应高可靠、高稳定、低噪声、低温漂。
5 结 论
相比于传统工艺制作的磁通门探头,本文设计的探头具有工艺简单、可靠性高、稳定性好等特点,适用于大批量生产。测试结果表明:电子罗盘最大误差度为3°,满足导航性能要求。
[1] 李大明.磁场测量[M].北京:科学技术出版社,1992:89-104.
[2] Mo Li,Rouf V T,Thompson M J,et al.Three-axis Lorentz-force magnetic sensor for electronic compass applications[J].Journal of Micro-electro-mechanical Systems,2012,21(4):1002-1010.
[3] Racz Robert,Schott Christian,Huber Samuel.Electronic compass sensor[C]∥Proceedings of IEEE,2004:1446-1449.
[4] Magnes W,Diaz-Michelena M.Future directions for magnetic sensor for space applications[J].IEEE Transactions on Magnetics,2009,45(10):4493-4498.
[5] Velasco-Quesada G,Roman Lumbreras M,Conesa-Roca A,et al.Design of a low-consumption fluxgate transducer for high-current measurement applications[J].IEEE Sensors Journal,2011,11(2):280-287.
[6] Forslund A,Belyayev S,Ivchenko N,et al.Miniaturized digital fluxgate magnetometer for small spacecraft applications[J].Measurement Science and Technology,2008,19(1):015202.
[7] 吕 辉,刘诗斌,微型磁通门传感器的低功耗结构设计[J].传感器与微系统,2015,34(3):81-83.
[8] 刘诗斌.无人机磁航向测量的自动罗差补偿研究[J].航空学报,2007,28(2):411-414.
[9] 李 智,李 翔.基于椭球假设的三轴电子罗盘罗差补偿研究[J].仪器仪表学报,2011,32(10):2210-2215.
[10]杨新勇,黄圣国.磁航向测量系统误差修正方法研究[J].仪器仪表学报,2004,25(4):466-468.
