应用于光学遥感仪器的扫描机构设计
2015-03-29王晓旭林冠宇曹佃生于向阳
王晓旭,林冠宇,曹佃生,于向阳
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春130033;2.中国科学院大学,北京100049)
式中,a为径向辐射管道间隙;d0、di分别为径向辐射管道外径、内径。
串联总流导计算:
1 引言
扫描机构是很多空间光学遥感仪器接受地物光学信息的第一个环节,通常起到反射地物光学信号、扩大视场范围和增加光学系统积分时间等作用,其性能直接影响遥感系统的成像质量,是遥感仪器重要的组成部分[1]。空间扫描机构的关键技术主要包括电机驱动技术、反射镜轻量化技术及润滑与密封设计等。机构运转精度对成像质量有着重要影响,需要高精度电机驱动技术保证;反射镜的轻量化对于发射成本、转动精度和面形精度等各方面都有着积极作用;而润滑与密封是保证驱动机构长期稳定运行的重要保证。
本文就扫描机构的高精度、长寿命设计方法展开研究,以期指导工程实践。
2 空间扫描镜机构组成
空间一维扫描机构的总体结构如图1所示。

图1 机构整体结构示意图
2.1 驱动传动方式
伺服控制元件是构成传动系统的基础,其性能的好坏在很大程度上影响系统的工作精度。伺服电机采用分装式无刷直流力矩电机以满足尽可能高的响应频率,良好的低速平稳性,过载能力强[2]等要求。针对高转动控制精度的要求,传动方式采用电机直驱;轴系采用一对角接触球轴承两端固定的方式支撑,以保证机构的转动精度与刚度,如图2所示。为保证轴系的高精度长寿命运转,需要对润滑与密封进行分析设计,具体见下文。
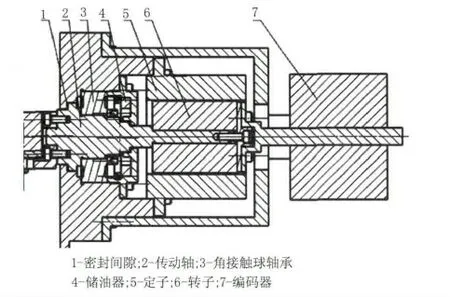
图2 驱动与传动系统图
使用绝对式光电编码器对电机进行闭环控制。编码器精度计算:

式中,d为CCD像元尺寸;f为光学系统焦距;α为一次成像的最大误差角;t为系统积分时间;ν为速度精度。
2.2 反射镜组件
反射镜面形情况是光学系统最关心的指标之一,其支撑形式对面形精度影响很大[3]。根据光学系统要求,反射镜背面需要漫反板进行光谱定标;反射镜选用铝材质,矩形镜面尺寸120 mm×140 mm。漫反板不能被遮挡,拟采用周边支撑。周边支撑结构简单,镜座质量大、无装配应力,可以增加反射镜刚度,但无柔性支撑,存在热应力,适用于工作温度稳定的小反射镜[4]。
反射镜与漫反板都以胀套螺纹连接于镜框,这样可以隔离装配应力,使安装面与镜面不在同一平面上,减少装配应力对反射镜面形精度的影响。具体结构如图3所示。
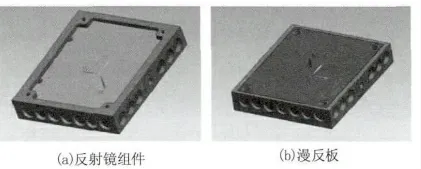
图3 反射镜组件结构
2.3 支撑结构
为满足反射镜面形精度要求,使用刚性外壳加柔性支撑件的方式达到设计目的。
轴系与外壳的结构与材料不同,温度会使机构内部产生热应力,增加轴承载荷、电机载荷与控制难度;热应力也会全部作用于反射镜组件,使反射镜面形精度的下降。基于以上原因,刚性支撑结构应尽量采用与反射镜线胀系数相同的材料,且需要设计柔性支撑件吸收热变形。
刚性支撑优化方式主要为在外壳上增加筋板,以提高机构的静态刚度与一阶基频。
3 系统建模及分析优化
3.1 长寿命运行设计
为保证系统的高精度长寿命连续工作,应对系统的润滑与密封进行分析优化。
3.1.1 润滑分析
航天工程广泛应用的固体润滑方式,如MoS2溅射薄膜[5],寿命一般在107转量级,无法满足机构寿命需求,只能采用液体润滑方式。
影响轴承寿命的主要参数λ:
根据弹流润滑理论,最小油膜厚度:

采用低饱和蒸汽压脂润滑剂及航天级角接触球轴承(σ=0.13μm),得出润滑薄膜参数为1.2。
轴承额定寿命(h):
其中,n为转速;对于球轴承,ε为3;C为基本额定动载荷,对于向心轴承,为径向基本额定动载荷,C
=Cr,Cr=bmfc(i cosα)0.7z2/3DW1.8。P为当量动载荷,无冲击、交变载荷时,P=YFa,参数Y与Fa可以查询机械设计手册。图4为油膜参数与额定寿命的关系曲线[6]。
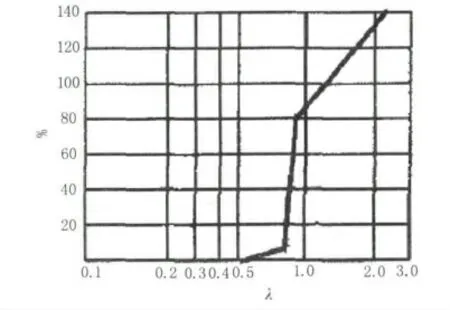
图4 λ与轴承额定寿命关系的经验曲线
结合以上可得,轴承寿命约为额定寿命的100%,在10 N载荷下(单个滚动体),寿命约为106年,远大于设计寿命,可知决定润滑系统寿命的主要因素是润滑剂的供应能力,即供油及密封的效果如何。拟采用储油环供油以及径向轴向组合间隙密封方式[7],具体密封结构可参考图5。
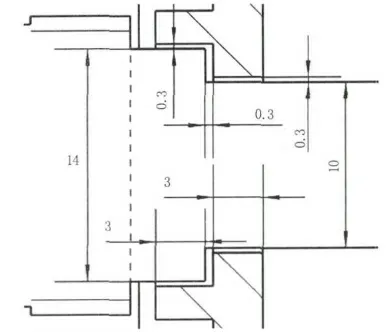
图5 组合式密封结构
3.1.2 密封分析
系统工作于1.09×10-5Pa下,润滑剂流动状态可以判定为分子流,连接处流导可忽略[8]。采用组合式间隙密封结构,如图5所示。
环形管道流导:

式中,T为热力学温度;M为流体分子量;d1、d2分别为环形管道外环、内环直径;L为管道长度;Kh为管道形状系数。
径向辐射流导:
式中,a为径向辐射管道间隙;d0、di分别为径向辐射管道外径、内径。
串联总流导计算:
管道中的气体流量:

式中,(p1-p2)为环形管道两侧的压力差。
泄漏气体质量:
式中,m为寿命内泄漏气体总质量;R为气体常数。以上数值皆为国际单位。
代入数据,可知单侧轴系在寿命内润滑油泄漏量约为3.5 mg,远小于储油器储油量(大于500 mg),密封结构可靠。
3.2 结构质量及刚度优化
3.2.1 基本原理
有限元分析:以扫描机构节点位移为基本未知数,由最小势能原理建立有限元方程。
单元内任一点位移可以表示为:

由几何方程及式(1)导出的用节点位移表示单元内任一点应变关系式:

由物理方程及式(2)导出节点表示单元应力的关系式:

根据虚功原理建立单元节点力与位移间的关系式:

其中,{w}为单元内任意点的位移列向量;[N]为形函数矩阵;{u}(e)为单元节点位移列向量;{ε}为单元内任一点的应变向量;[B]为单元应变矩阵;{σ}为单元内任一点的应力列向量;[D]为与材料属性相关的弹性矩阵;[k](e)=∫∫∫[B]T[D][B]dxdydz为单元刚度矩阵,{p}(e)为单元节点力向量。集合所有单元刚度方程,利用最小势能原理建立结构节点载荷与位移关系式:
其中,[K]为整体刚度矩阵;{p}为结构载荷矩阵;{U}为结构位移矩阵。
引入位移与载荷边界条件,对式(5)求解,即可得节点位移,进而通过式(2)、(3)求出应变与应力。
在CAD软件UG中建立三维实体模型,然后导入Hypermesh中建立有限元模型。鉴于上文所述,分析优化项目主要有扫描镜的轻量化设计、柔性板的分析优化及整体的分析优化,即外壳加筋方式的优化。
有限元分析方法的准确程度取决于计算模型地建立是否准确,具体来说就是网格类型、载荷与边界条件的设置。为减少建模与计算的时间,同时保证一定的计算精度,对模型进行如下简化:
1)忽略机构中对整体动态、静态刚度影响很小的细小特征,如倒角、圆角等;
2)螺钉连接面采用局部节点拟合的方法模拟,忽略了螺钉、螺钉孔以及预紧力的影响;
3)电机、编码器等标准模块,认为其质量均匀分布于模型上,忽略其内部质量分布的不均匀性。
4)部分结构采用壳单元模拟,以便减少计算量,增加设计灵活性。
拓扑优化原理:主要有均匀化、变厚度和变密度法。变密度法是最常用的方法,其基本思想是引入假想密度在0~1间可变的材料,并以每个单元密度相对密度为设计变量。变密度法假定相对密度与弹性模量间的对应关系,应用较多的是SIMP(Solid isotropic microstructure with penalization)法。其材料模型为:
式中,xe为每个单元相对密度;ρ(x)为拓扑优化设计变量;ρ0为每个单元固有密度;E(x)为优化后的弹性模量;E0为初始弹性模量;p为惩罚因子。
拓扑优化的求解方法很多,主要有优化准则法、序列线性规划法和移动渐近线法等[9]。
3.2.2 柔性支撑件的设计
由上文支撑结构部分可知柔性支撑件的设计需求。由机构的温度载荷有限元分析可知,在实验的温度范围内(-30~70℃),轴系的轴向变形量约为55μm;参考NSK轴承的轴向游隙与预紧力之间的关系,如表1所示,若不使用柔性支撑件,55μm变形会造成600 N以上的反馈力,这是机构无法容忍的;考虑到整体机构的动刚度,柔性支撑件柔性不能过大[10]。综合考虑机构柔性与刚性的要求,选择柔性支撑件尺寸。

表1 轴承7004C预紧力与轴向游隙的关系
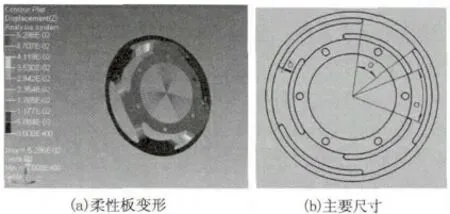
图6 柔性板变性趋势及相关尺寸
柔性支撑件变形形式及影响刚度的主要尺寸在图6中给出,t为弹性部分厚度,内外圈尺寸已由机构外壳与轴系设计空间所约束。主要尺寸对刚度影响如表2所示。

表2 柔性板关键尺寸与刚度关系
3.2.3 反射镜组件的分析优化
为减小电机载荷、提高控制精度,反射镜应进行轻量化。反射镜所受载荷一般有重力、支撑力、温度等[11]。在本机构中,反射镜组件所有载荷可以归结为重力和轴向的预紧力。对镜框两端施加约束并加重力载荷后发现,反射镜尺寸较小,重力引起的面形变化很小,反射镜变形主要是由轴承加载的预紧力造成的。
考虑工程经验:1)设置轴向载荷为100 N(实验温度范围内最大轴向载荷);2)镜面厚度与四周壁厚取6 mm,镜体厚度19 mm,以反射镜中心剩余区域为优化可行域;3)以可优化区域质量分数最小为目标;4)由于Hyperworks商业软件没有内置RMS值响应约束,设置镜面面形约束有两种方法:一是利用DRESP3卡片进行二次开发,写入二维平面拟合函数或Zernike多项式拟合作为面形约束,适用范围广但比较复杂,需要根据工况不断调整函数;二是利用工程经验:在镜面刚体位移很小时,镜面RMS值一般小于镜面位移PV值的1/4,适用范围较小但简单易行。本文反射镜满足第二种方法的应用条件,所以采用第二种面形约束方式。
通过Optistruct求解器进行拓扑优化,得出结果如图7(a)所示。在给定工况下,只需增加一定壁厚即可满足反射镜面形精度要求。考虑结构工艺性及可靠性,增加壁厚并均匀设置加强筋如图7(b)所示。图7(c)为反射镜变形图。将反射镜变形前后的镜面节点位置坐标信息输出到镜面面形处理软件中,通过Zernike多项式拟合方法[12],求得反射镜RMS值为13.2 nm,优于λ/40,满足要求。最终结构与未优化反射镜相比,轻量化率为42.0%。轻量化率不高的原因是反射镜尺寸较小,可优化区域也相对较小,所以轻量化率不高。
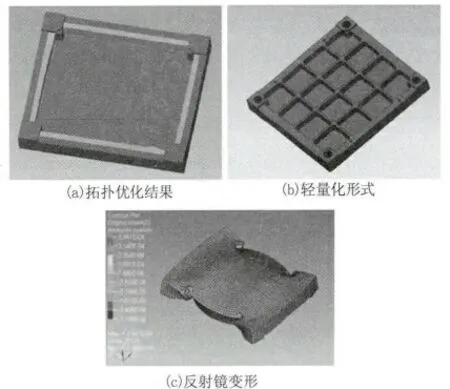
图7 反射镜拓扑优化结果
3.2.4 支撑结构分析优化
外壳是整个机构的主要支撑结构,对于机构的强度刚度影响最大。初步设计结构一阶模态振型为弯曲振型。为加强结构动态刚度,拟在如图8(a)位置设置加强结构。为探求加强结构的最优化分布,以系统一阶固有频率为设计约束,可优化区域材料最少为优化目标进行拓扑优化,结果如图8(b)所示。结合设计经验、工装要求与结构工艺性,设置加强筋如图8(c)所示。

图8 外壳结构拓扑优化结果
3.2.5 整机分析
以接口位置为固定约束,对机构进行模态分析得到机构前六阶固有频率列在表3中。

表3 机构前6阶固有频率
对机构进行静力学强度分析。在20℃温度下,轴向、垂直轴向两个方向分别加十倍重力载荷,约束接口位置6个自由度,得到机构除柔性件外最大应力30.9 MPa,远小于材料许用应力值。由此可见,扫描机构的静强度符合要求,具有较高的可靠性。
4 总结
本文以一种应用于光学遥感仪器的扫描镜机构的设计为例,介绍了空间环境下的小型扫描反射镜机构的设计思路及主要方法结论。针对所关心的镜面面形和整机刚度问题,运用CAD、CAE软件进行了建模分析优化,得出了符合要求的结构。分析结果表明:机构紧凑,整机质量4.94 kg;在实验温度范围内,反射镜面形精度RMS值优于λ/40(λ=632.8 nm);机构运行环境适应范围-30~70℃、真空度1.09×10-5Pa,可以满足空间运行环境要求;设计寿命5年以上;机构拥有足够的静态强度;一阶基频高于100 Hz,远离驱动频率,机构具有较好的静态及动态特性。
[1] WANG Yiqun,QI Xinda.Survey on foreign space optical scanning mechanism[J].OME Information,2010,27(12):15-20.(in Chinese)汪逸群,齐心达.国外空间扫描机构现状[J].光机电信息,2010,27(12):15-20.
[2] YANG Lei.Research of swing scanning mechanism with high precision[D].Changsha:National University of Defense Technology,2005:4-6.(in Chinese)杨磊.高精度摆动扫描技术研究[D].长沙:国防科学技术大学,2005:4-6.
[3] WANG Fuguo,WU Xiaoxia,SHAO Liang,et al.Review of foreign ground-based telescope primary mirror support[J].Laser&Infrared,2012,42(3):237-243.(in Chinese)王富国,吴小霞,邵亮,等.国外大型地基望远镜主镜支撑综述[J].激光与红外,2012,42(3):237-243.
[4] TAN Jinguo.Research on crcumjacent support structure of minitype reflector in space camera[D].Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,2011:17-22.(in Chinese)谭进国.空间相机小型反射镜周边支撑结构研究[D].长春:中国科学院长春光学精密机械与物理研究所,2011:17-22.
[5] Boving H J,Hintermann H,Stehle G.TiC-Coated ball bearings for spin-axis gyro application[J].Lubrication Engineering,1981,37(9):534-537.
[6] LIN Xuesong,WANG Lipeng,WANG Shurong.Research on the bearing lubrication and sealing of the optical modulator in space[J].Lubrication Engineering,2007,32(4):136-139.(in Chinese)林雪松,王立朋,王淑荣.空间光学调制器中轴承的润滑及密封研究[J].润滑与密封,2007,32(4):136-139.
[7] Trutnovsky K.Non-contact seals[M].Beijing:China Machine Press,1986:97-99.(in Chinese)塔路达纳夫斯基.非接触密封[M].北京:机械工业出版社,1986:97-99.
[8] DA Daoan.Vacuum design manual[M].Beijing:National Defense Industry Press,2004:100-119.(in Chinese)达道安.真空设计手册[M].北京:国防工业出版社,2004:100-119.
[9] SHA Wei,CHEN Changzheng,ZHANG Xingxiang,et al.Topological lightweight design of space mirror[J].Opto-Electronic Engineering,2009,36(4):35-39.(in Chinese)沙巍,陈长征,张星祥,等.空间反射镜轻量化结构的拓扑优化设计[J].光电工程,2009,36(4):35-39.
[10]CHEN Yudong.Structural vibration analysis[M].Changchun:Jilin University Press,2007:9-14.(in Chinese)陈宇东.结构振动分析[M].长春:吉林大学出版社,2007:9-14.
[11]SHAN Baozhong,CHEN Entao,LU E,et al.Thermal/structural/optical integrated analysis of space cameras[J].Optics and Precision Engineering,2001,9(4):377-381.(in Chinese)单宝忠,陈恩涛,卢锷,等.空间光机热集成分析方法[J].光学 精密工程,2001,9(4):377-381.
[12]ZHAO Yuan,ZHANGDianfu,WANGHongwei.Integrated thermal-structural-optical analysis of a space telescope[J].Laser&Infrared,2012,42(11):1268-1272.(in Chinese)赵源,张殿富,王洪伟.某空间望远镜光机热集成分析[J].激光与红外,2012,42(11):1268-1272.