轰炸光电瞄准模型建立
2015-03-29王昊鹏刘泽乾张会勇刘成亮李星宇
王昊鹏,刘泽乾,张会勇,刘成亮,李星宇
(1.海军航空工程学院武器系统与运用工程系,山东 烟台264000;2.空军航空大学作战指挥系,吉林 长春130022;3.空军航空大学,吉林 长春130022)
1 引言
光电瞄准系统正在取代传统型纯光学瞄准系统,成为实现全天候精确轰炸的新一代瞄准系统。而国内主战轰炸机配备的纯光学目视瞄准具已经无法满足当今信息化作战要求,主要表现在目标截获难、轰炸精度低、载机生存能力弱等方面,急需配备光电瞄准系统。为解决轰炸光电瞄准模型这一光电瞄准系统实现过程中的关键技术,需建立轰炸光电瞄准模型[1-3]。
轰炸瞄准与控制是通过与武器射程相联系的投放点和命中点的瞄准解算来实施的。常用的轰炸方法分为连续计算投放点(CCRP,Continuously Computed Release Point)及连续计算命中点(CCIP,Continuously Computed Impact Point)两种。CCIP是在解算出命中点之后,通过与目标位置相比较来确定投弹时机;而CCRP则通过计算投放点位置或到达该点的时间来掌握投弹时机[4-6]。
光学瞄准系统采用CCRP瞄准,在截获目标之后,解算出投弹点,通过当前位置与投弹点之间的角度差值来修正载机位置,并确定开舱与投弹时刻。光学瞄准系统中夜间及复杂气象条件下无法观测到目标,不能完成目标截获,自然无法进行轰炸瞄准。相比之下,光电瞄准系统通过红外、可见光和激光设备探测目标,结合数字图像处理技术,可全天候快速截获目标,解算出光学瞄准系统无法获得的目标数字量位置数据。本文模型建立的任务就是有效利用这些数据,确定光电瞄准系统下飞控、开舱及投弹的解算模型[7-9]。
2 航行法下瞄准任务分析
较光学瞄准系统,光电瞄准系统在目标截获和计算速度方面都有很大提高,有较充足的时间获取目标区域的风场参数,可以应用航行法进行快速瞄准。
有风情况下投弹,炸弹离开飞机以前,是和飞机以同样的速度运动的。包括飞机和炸弹在内的整个空气团都是运动的,计算有风弹道所取的坐标相对地面来说是运动的,它运动的速度等于风速U。这时炸弹相对地面的运动,是由相对空气的运动和随空气运动的牵连运动组成的。因此,炸弹相对空气运动的速度就等于飞机空速V,相对地面运动的速度等于飞机地速W,即飞机空速V与U的矢量和,如图1所示,空速与地速夹角称为偏流角,以α表示。
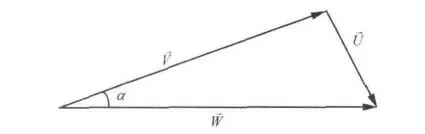
图1 空速、地速、风速矢量三角形Fig.1 Vector triangle of space velocity,velocity and wind velocity
侧风情况下水平轰炸弹道如图2所示。
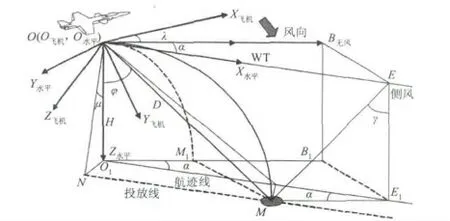
图2 侧风弹道图Fig.2 Ballistic under cross wind
飞机在O点对准OB方向投弹,在无风情况下,炸弹落在M1点。有风情况下,如果飞机投弹后仍然保持原来的飞行状态飞行,就会沿着OE方向运动,炸弹落地时,飞机飞到E点。OBB1O1为无风时,轰炸轨迹所在平面;OEE1O1为侧向有风时轰炸轨迹所在平面;V为飞机空速;H为轰炸高度;γ为退曳角,ME1为退曳长;W为飞机相对地面轰炸目标的速度,它是风速与空速的合成速度;M点为轰炸目标点;α为偏流角,它是飞机航向与飞机航路的夹角,即飞机空速V与地速W的夹角;MP为横偏长,反映了侧风对弹道轨迹的影响;坐标原点O即为投弹点。
投弹前H、V、U及炸弹种类确定后,载机投弹位置是一个固定点,与目标相对位置关系也是确定的,只有在该固定点投弹,炸弹才能命中目标。瞄准过程的实质就是将载机引导到该固定点,因此航行法瞄准过程中的关键任务就是实时解算载机与目标的相对位置关系。
3 数值计算
轰炸目标在水平坐标系下的坐标P X,Y,( )Z 可表示为[10]:
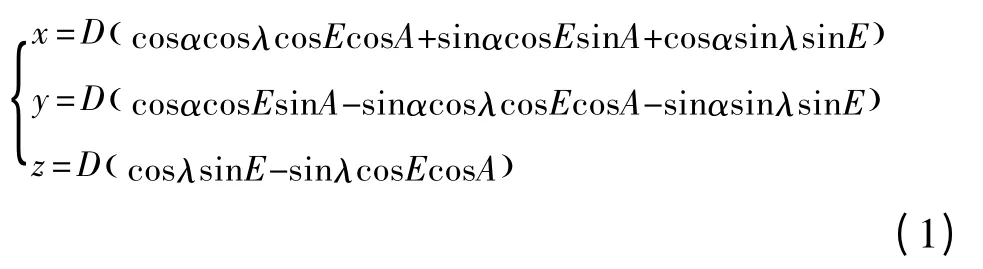
其中,x即为目标沿航迹线方向的距离;y为目标到航迹线的距离;z为载机水平飞行高度。θy=-λ,λ为载机俯仰角,θz=α。λ、α可直接从显控系统读取。显控系统是载机火控系统人机交互核心,承担火控系统总线控制任务,基本涵盖了载机所有的航行与火控数据。
侧向瞄准距MP和纵向瞄准距MN分别由式(2)、(3)计算:

其中,T为炸弹落下时间;γ为退曳角。
将MP写成矩阵形式有:

同理,求出MN:炸弹落下时间T是根据H、V查弹道表获得,W由显控系统获得,将T带入式(3)中,将MN表示成矩阵形式:

确定了目标在水平坐标系下坐标计算方法和当前要实现准确轰炸所需的侧向瞄准距MP和纵向瞄准距离MN的计算方法后,瞄准中实时对比MP与y、MN与x来实施瞄准,以下具体分析应用光电瞄准系统时的轰炸瞄准过程。
4 轰炸光电瞄准机理
轰炸目标坐标是三维的,而通常水平轰炸飞机的飞行高度是不变的,这样轰炸瞄准的原理可以简化为侧向瞄准和纵向瞄准,也就是通过计算轰炸目标在水平坐标系下的x,y坐标,将其和载机当前位置时的侧向瞄准距MP与纵向瞄准距MN进行比较,修正差值进行瞄准,即光电瞄准采用的是测距法。同光学瞄准系统相同,光电瞄准系统依据的基本原理也是CCRP基本原理,瞄准过程如图3所示。
图3 轰炸光电瞄准过程Fig.3 Process of bombing electro-optic targeting
为了达到和轰炸瞄准设备在方向瞄准时纵标线和地速方向一致的条件,光电探测设备输出的图像需要通过数字图像处理技术叠加一个与目视光学系统分划板相似的电十字标线,该电十字标线在旋转了一定角度后纵标线方向和地速方向相同,以直观反映载机与目标的相对位置关系。地速方向又与爆炸线方向平行,可以根据解算出的距离差值解算出爆炸线位置,作为十字光标纵标线,在根据炸弹射程,可以确定出十字光标的横标线,十字光标中心点即为载机当前位置下的爆炸点。这样光电瞄准过程显示为十字中心压住目标的过程,首先进行方向瞄准,保持十字光标纵标线持续穿过目标,然后进行距离瞄准,使十字中心压住目标,开始投弹。
5 解算算法
5.1 飞控参数解算算法
光学瞄准采用测角法,角度差值是核心状态参数,同时作为飞控信号输入自动驾驶仪,控制载机飞行;方向瞄准的完成标志是瞄准线倾斜角等于观测线倾斜角,距离瞄准的完成标志是观测角等于瞄准角。飞控信号在方向瞄准过程中输出。
轰M型飞机采用KJ-3C比例式自动驾驶仪,即舵面偏转角与角度差值成一定比例关系。光电瞄准系统替代原光学瞄准系统,力求对载机改动最小。如果光电瞄准系统输出的飞控信号与角度差值成线性关系,便可直接并入原飞控信号输入通道。光电瞄准时,ξy是方向瞄准中的核心状态参数,ξy=0时方向瞄准完成。然而,ξy不是理想的飞控信号,主要原因如下:
(1)ξy范围最大在0~+∞之间,角度差值最大在0°~90°,若以ξy作为飞控信号,数据处理复杂;
(2)Δξy与偏流角差值Δα不存在线性关系。将式(1)中z代入式(4)中得到侧向瞄准距MP:

以ξy表示MP与P X,Y,( )Z 中y差值,结合式(1)、(5)得:

ξy对α求偏导得:
式(8)结果不为常数,说明Δξy与Δα不存在线性关系,还需解算出角度差值作为飞控信号。
由式(1)、(2)、(4)、(5)得,瞄准线倾斜角μ、观测线倾斜角ν分别如下计算:
将Δν信号并入自动驾驶仪航向输入通道,即可完成对载机航行的控制。从控制系统的角度来看,侧向瞄准控制过程中,Δν为系统输入,ν为系统输出同时作为反馈影响输入,如图4所示。

图4 侧向瞄准过程控制示意图Fig.4 Controlling plan of lateral targeting process
Δν经主控计算机放大处理后(用h( Δν )函数表示)输出对应模拟信号,将处理结果σy输入自动驾驶仪,自动驾驶仪获取载机飞行马赫数与动压值,经过处理,形成舵面偏转指令(用f( σy)函数表示),输出舵面偏转指令η。η输入到舵面伺服机构控制舵面偏转(用ψ(η)函数表示),修正载机偏流角α控制载机转弯,进行侧向瞄准,在此过程中,Δν动态改变,当Δν=0时停止飞机转弯,侧向瞄准完成,该偏流角为准确值,紧接着进入纵向瞄准。
5.2 预告、投弹时刻解算算法
轰炸瞄准的最终结果是开舱投弹,体现到瞄准系统上便是输出开舱及投弹信号,体现到载机上便是相应瞄准系统发出的开舱及投弹信号。
应用光电瞄准系统后,开舱及投弹执行机构没有改变,载机机械结构也没有较大改变,因此开舱时刻依旧采用光学瞄准开舱时刻,即β=1.2286时(数据由通过大量统计获得)。β=1.2286,接通电动投弹器中的“预告触点”,使预告继电器工作,接通两条电路:一条是正常开放弹舱门的电路,使弹舱门自动开放;另一条是预告指示灯的电路,瞄准具头部上的绿色指示灯和雷达显示器上的红灯都亮,通知领航员即将投弹。将式(1)结果及z带入式(3)求出MN:

同式(9)和式(10)可求得β、:
式(15)确定了预告信号发出时机。以上在计算飞控、预告信号时,载机高度H都是用式(1)激光测距器测得的高度z。若水平轰炸时载机高度保持较好,则可以直接利用预先设定的H替代z,可以简化运算,而用z运算算法通用性更强。
投弹信号发出时机为ξx=0,不必再转换为角度值。
6 模型分析
6. 1 瞄准数据流分析
按照以上确定的模型算法,整个解算过程中涉及参数的意义、来源如表1所示。α、λ、V、W由惯导设备测量,由显控系统转发。轰炸瞄准过程需要光电瞄准系统与载机协调工作才能完成,图5显示了轰炸光电瞄准过程中的数据流向,这是光电瞄准系统工程实现过程中的重要参考。

表1 瞄准诸元解算参数分析Tab.1 Analysis of targeting calculating parameter
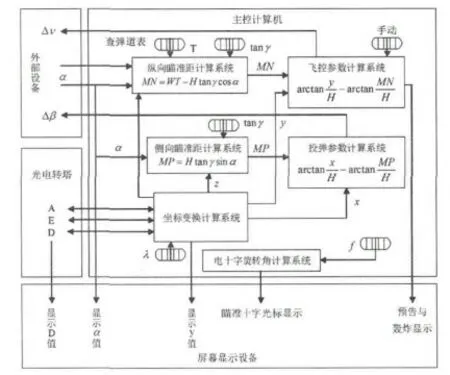
图5 轰炸光电瞄准数据流图Fig.5 Bombing electro-optic targeting data
6. 2 误差分析
根据式(1),由误差传递公式,当载机飞行高度为H=2 km,俯仰角λ=3°,偏流角误差σα=0.2°,俯仰角误差σλ=0.2°,激光测距器的测距精度为σD=5 m,光电转塔的测角精度为σA=σE=1 mrad,则光电转塔对地、海面轰炸目标沿3个方向的瞄准误差为[11]:

通过计算可以证明,对轰炸瞄准精度影响最大的是λ和α引入误差,其次是激光测距器的测距误差,而光电转塔的测角误差影响很小,可以忽略。
7 瞄准模型仿真验证
验证瞄准模型实质就是模拟轰炸光电瞄准过程,验证瞄准模型各功能模块,保证验证质量的关键是模拟过程要接近真实瞄准过程,同时能够实现对各个功能模块的验证。以EOT-16AHD光电转塔为仿真平台,方向瞄准结束(距离瞄准开始)、预告、投弹时验证效果分别如图6、7、8所示。
图6、7、8中,瞄准十字光标纵轴能够始终压住目标,中心点与目标点距离逐步减小,到达投弹时刻,能够压住目标点,达到了预期效果。瞄准十字光标绘制时间设为double型数据,保留5位有效数字,统计20次结果如表2所示。
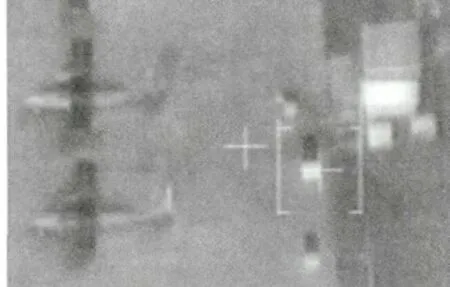
图6 方向瞄准结束时刻截图Fig.6 Screenshot at ending of direction aiming

图7 预告时刻截图Fig.7 Screenshot at forecast moment

图8 投弹时刻截图Fig.8 Screenshot at bombing moment
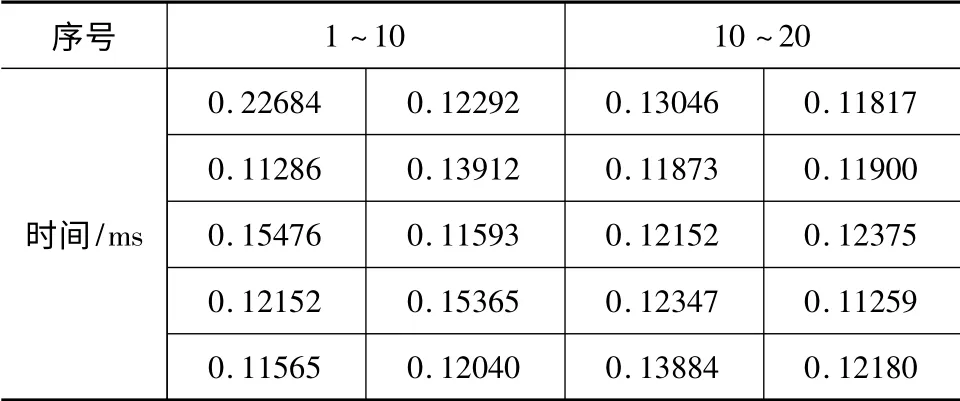
表2 瞄准十字光标绘制时间统计Tab.2 Draw time statistics of target cross cursor
8 结论
风向量不随高度改变的情况下,炸弹落下时间、退曳长和退曳角与无风时相等。侧风情况下,弹着点会偏离航迹而产生横偏长,无论是顺风还是侧风,炸弹总是落在飞机纵轴的正后下方。
光电瞄准系统能够依据CCRP原理,瞄准过程中,实时获得目标位置水平坐标系下三维数据P X,Y,( )Z ,以y与横偏长MP差值ξy为基准修正载机偏流角α,ξy=0时完成方向瞄准,目标位于爆炸线上;方向瞄准结束后,以x与纵偏长MN差值ξx为基准修正速度,β=1.2286时开舱,ξx=0时投弹。ξx、ξy实质上表示的是当前载机与投弹点之间的位置差距。
利用ξx、ξy及转塔测量角,可以快速绘制瞄准十字光标,直观显示自动瞄准过程。瞄准十字光标又是手动瞄准的重要依据,采用测距法将会明显减小手动瞄准工作量。组略计算瞄准误差大约10 m左右。
[1] ZHAO Wenhua,YANG Jianmin,HU Zhiqiang,et al.Numerical investigation on the hydrodynamic di?erence between internal and external turret-moored FLNG[J].J.Shanghai Jiaotong Univ.(Sci.),2013,18(5):590-597.
[2] WANG Jing,LAI Liguo,HE Yi,et al.The research on photoelectric turret virtual assembly Process planning and simulation[J].Defense Manufacturing Technology,2013,06(3):38-42.(in Chinese).王静,赖利国,何毅,等.光电转塔虚拟装配工艺规划及仿真技术研究[J].Defense Manufacturing Technology,2013,06(3):38-42.
[3] WANG Dapeng,FAN Huilin,HOU Manyi,et al.Status and development of bombing electro-optic targeting system[J].Laser&Infrared,2013,43(9):977-981.(in Chinese).王大鹏,范惠林,侯满义,等.轰炸光电瞄准系统现状与发展[J].激光与红外,2013,43(9):977-981.
[4] WANG Dapeng,FAN Huilin,HOU Manyi,et al.Control and realization of bombing electro-uptic targeting based on ARM[J].Observation and Control Technology,2013,32(10):62-65.(in Chinese).王大鹏,范惠林,侯满义,等.基于ARM的轰炸光电瞄准控制与实现[J].测控技术,2013,32(10):62-65.
[5] CHEN Lei,KOU Yingxin,LI Zhanwu,et al.Modeling and analysis of a fused bomb aiming principle integrating CCAR with CCRP[J].Electronics Optics&Control,2013,20(8):58-62(in Chinese).陈磊,寇英信,李战武,等.新型CCAR与CCRP融合式轰炸瞄准原理建模与分析[J].电光与控制,2013,20(8):58-62.
[6] LTG Michael A.Vane,MG David E.Quantock.Countering the improvised[R].Army Capabilities Integration Center,2011.
[7] Florence K Yee.Depot-level simulation and multivariate analysis on B-1 high velocity maintenance[D].Ohio:Air University,2011,3.
[8] Jason SHamilton.Determining pilot manning for bomber longevity[D].OhioAir University,2011,3.
[9] Lawrence John,Tom McCormick,Patricia M McCormick,et al.Self-organizing cooperative dynamics in government extended enterprises:experimental methodology[C].Systems Comference,2011 IEEE International,2011:224-231.
[10]Zarchan P.Tactical and strategic missiles guidance[M].Washington:American Institute of Astronautics and Aeronautics,1998:229-230.
[11]LIU Daoyu,JIANG Pingyu.Based on the analysis of error transfer network process flow fluctuation[J].Journal of Mechanical Engineering,2010,24(2):558-559.(in Chinese).刘道玉,江平宇.基于误差传递网络的工序流波动分析[J].机械工程学报,2010,24(2):558-559.