基于EFEM的5R机械臂刚柔耦合动力学分析
2015-03-23车仁炜陆念力薛渊
车仁炜,陆念力,薛渊
(哈尔滨工业大学机电工程学院,黑龙江哈尔滨150001)
现代科学技术的发展使机械系统不断向高速、轻质、复杂化方向发展,构件在惯性力急剧增大的同时刚度在不断降低,从而导致构件的弹性变形及其对机械运动输出的误差不断增加。此外,由于机械系统柔度加大而带来的系统固有频率的下降和因机械运转速度的提高而造成的激振频率的上升,可能使机械系统产生较强的振动现象。将构件视为刚体的动力学分析方法,由于忽略了构件的弹性变形,已不再适应现代机械设计分析的要求,但是,对大型的复杂的机械系统,系统中构件数目很多,许多构件往往刚性很大,而若把整个系统看做柔性系统做动力学解算时,又会导致运动方程维数很大,不易求解[1-3]。因此,对含有限刚性构件的复杂机械系统进行刚柔耦合动力学分析将对工程实际具有非常重要的应用价值。
1 等效动力学模型
图1为港口起重机臂架系统机构简图,这是一个含有5个转动副的5R机械臂,其主要包括以下部件:主臂①、摇臂②、拉杆③、变幅驱动机构④和平衡重移动机构⑤等,图中1~11为节点编号.变幅原理为:变幅电机首先带动变幅小齿轮转动,小齿轮再带动螺母齿轮反向转动,进而实现丝杠的线性运动,导致主臂作俯仰运动,从而实现起升载荷幅度的改变。
在对其进行动力学分析时,若只视其为多刚体系统,则建模过程简单,分析方便,但忽略了结构变形对运动的影响;若将其视为多柔体系统,则只考虑到运动对变形运动的影响,没有充分考虑到运动和变形之间的相互耦合作用。本文将基于等效元素集成法(equivalent finite element integrated method,EFEM),将系统视为含有限刚性构件的刚柔耦合系统,建立港口起重机5R机械臂的刚柔耦合动力学模型,对构件(单元)自身的动力学特性进行等效,组建成等效系统,将建模的关键归结为系统中二阶转换张量和相应的三阶转换张量的求解以及系统质量阵的组装,按多柔体动力学的方式建立方程。与传统方法比较,模型建立简单快捷,规范化、程式化,由于转换阵的引入,方程维数大大减少,极其适合现代计算技术的发展[4-5]。

图1 机械臂机构简图Fig.1 Movement diagram of 5R manipulator
与结构静力计算和振动分析相比,机构动力学分析中运用有限元方法并不多见[8-10]。究其原因,很大程度是因为机构分析中的刚性单元与结构分析中的弹性单元有很大区别,系统组建规则无法直接运用。其主要问题在于:1)单元是通过单元结点自由度与其他单元发生联系,实现运动和力的传递,从而组装成系统。因此,弹性单元的自由度多位于单元结点上,且与结点自由度(独立坐标)数相同。刚性单元则不然,自由状态下,刚性单元的独立自由度(活动度)数是确定的,平面单元活动度为3,空间单元活动度为6,且结点上的可能位移数目也不尽相同。刚性单元的结点自由度不一定与其独立坐标相同,可能会产生结点自由度(可能位移)不能相互独立无关的情况。2)刚性单元中弹性刚度阵已不存在,其质量阵也不能采用弹性单元的形式,必须重新构造。3)系统运动自由度与单元自由度的约束与耦合关系更为复杂,使系统方程的组装难度增大,系统动力学方程的表达趋于复杂[11-12]。
在复杂机构中,无论各构件的质量如何分布,都可以用等效元素集成法将其等效为集中质量分布的等效单元[4-7],为使等效集中质量单元与原质量单元在静力学和动力学方面等效,应保证等效之后单元的惯性矩阵与原单元的惯性矩阵完全相同。关于等效单元、等效系统的概念以及等效原则和单元动力学方程的推导已在文献[4-5]中给出。
1.1 从弹性单元到刚性单元
如前所述,任何分布质量的刚性构件,均可按等效原则变为集中质量的等效单元,从而使单元质量阵列写得极为简单,例如平面梁杆单元向两端等效的平面杆单元质量阵可表为

但是必须指出,这只是具有两结点、6自由度的平面弹性梁杆的质量阵,它并不能应用于刚性系统的动力学建模,它只是借用了弹性单元的表达形式。实质上,在刚性单元中,这些结点自由度并非相互独立。只有在加入刚性约束条件后,等效单元才具有真正意义上的等效[5]。
当引入系统各单元的刚性约束条件建立过渡坐标时,由过渡坐标ui与广义坐标qa间的关系,可确定二阶转换矩阵及三阶转换矩阵:

确定广义坐标后,广义坐标qa和系统各可能位移ui之间的关系可以很方便地写出,因此,二阶及三阶转换张量的求解过程也很简单快捷,避免了用传统方法的繁杂求导以及考虑哥氏加速度等运算。无论对单自由度还是多自由度系统,系统构件数越多越复杂,越能显示其优越性。
1.2 刚柔耦合系统动力学方程的集成
对于刚柔耦合系统,在建立动力学方程时,难点往往在于运动方程的列写和组装;而由于系统运动方程的复杂,方程的个数很多,又给求解带来极大的不便,因此,简单和程式化建模以及方便快捷地求解一直是学者们追寻的目标[13-16]。
描述刚柔耦合系统的运动时,运动方程仍可表示为

但方程的组装却和多柔体系统不同,因为方程的列写要考虑刚柔耦合作用。
1.2.1 系统质量阵M的集成
设系统可能位移总数为N,则系统总质量阵为N×N阶方阵。
设Hi(i=1,2,...,n)为系统中表示刚性单元各节点坐标和系统可能位移之间关系的关联矩阵,对柔性单元,Hi=0;设Hj(j=1,2,...,n)为系统中表示柔性单元各节点坐标和系统可能位移之间关系的关联矩阵,对刚性单元,Hj=0;由于组建质量阵时,在刚柔耦合项,分别引入了Hi=0和Hj=0,所以,用有限元法进行组装时,与传统方法比较,阶数大大降低,缩减了求解规模,提高了解题效率。
设m1为刚性单元质量阵,m2为柔性单元质量阵,用有限元方法可以组装成系统质量阵为

1.2.2 系统刚度阵和阻尼阵的组装
对于刚性单元,单元刚度阵为kr=0,单元阻尼阵为C=0;由C生成耦合阵De。
组装成系统刚度阵和系统阻尼阵时,矩阵中刚性单元相应位置为0,柔性单元相应位置按有限元方式组装。
1.2.3 系统运动方程数量的缩减
如前所述,刚性单元的结点自由度不一定与其独立坐标相同,当引入系统各单元的刚性约束条件建立过渡坐标时,可确定二阶及三阶转换矩阵Tia及Tibc,对柔性单元,Tia中相应位置元素为1,将Tia和Tibc代入到系统运动方程中,由于柔性单元在相应位置二阶转换张量元素为1,用有限元方法组建方程时,方程的数量就会大大缩减,所以提高了解题效率。
2 5R机械臂刚柔耦合动力学模型
如图1所示的5R机械臂,其机构参数为:变幅丝杠长度7.50 m,丝杠质量1 135 kg,丝杠螺距0.054 m,螺母齿轮转动惯量17 kg·m2,驱动马达转动惯量4 kg·m2,变幅机构质量3 200 kg,丝杠转动惯量 3 405 kg·m2,螺母齿轮半径0.442 m,驱动小齿轮半径0.051 m求马达的动力学响应。
由于图1所示模型中构件数目较多,将导致多柔体动力学分析总体求解方程规模较大,可取做大范围运动的相对刚度大变形小的单元为刚性单元,在此对其平衡重移动机构进行等效,以减小求解规模。假设连杆为刚体,在等效时,电机丝杠系统的动力等效为驱动力矩Mn施加于主臂上。
建立了如图2所示的等效动力学模型,14个系统可能位移ui的选取如图中编号1~14所示,将系统划分为5个单元,取⑤为刚性单元,①、②、③、④为柔性单元。
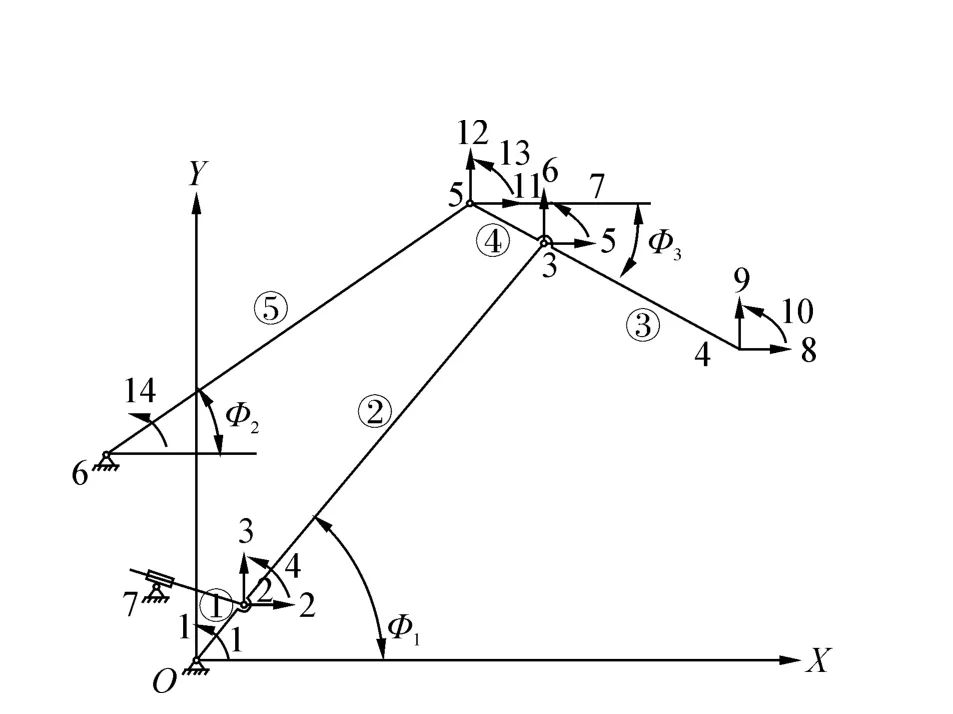
图2 动力学模型Fig.2 Dynamics model
单元节点号与系统可能位移之间的关联Nm如下

由Nm可分别写出Hi和Hj,然后按式(5)进行组装,可得系统质量阵为
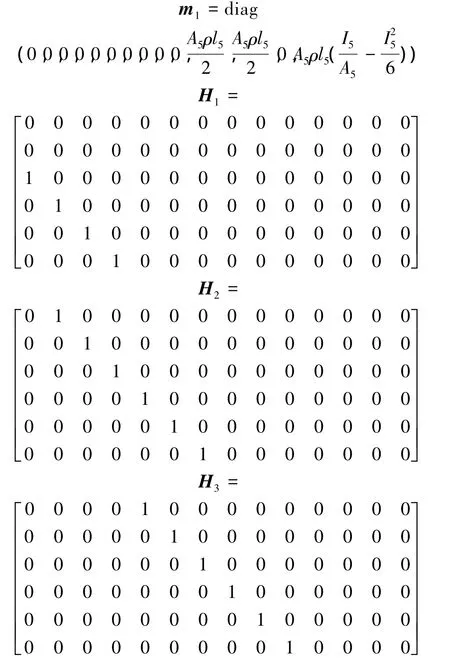



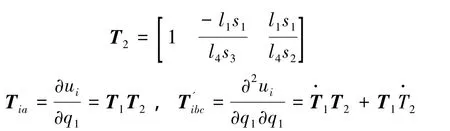
图3~5分别为马达驱动力矩、转速和加速度变化结果。3~5可见,启动6 s后,驱动力矩趋于平稳,马达速度变化越来越小,加速度趋于0,而刚柔耦合解较之刚性解更真实地反映了机构运动特性。

图3 马达驱动力矩Fig.3 The motor driving torque curve

图4 马达转速Fig.4 Motor speed curve
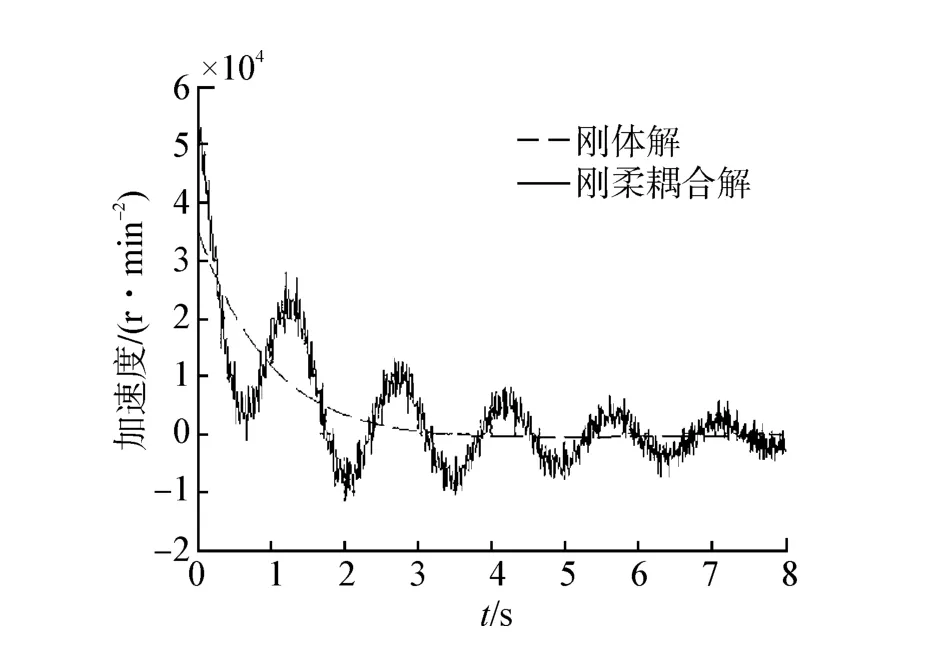
图5 马达加速度Fig.5 Motor acceleration curve
3 结论
1)基于等效元素集成法建立了复杂机构刚柔耦合动力学模型,与传统方法比较,模型建立简单快捷,规范化、程式化,极其适合现代计算技术的发展,为工程技术人员提供了一种动力学分析的手段。
2)用此方法对复杂机构建模,对刚性单元,由于采用了等效元素集成法,考虑节点约束,方程的维数减少;而对刚柔耦合单元,由于特殊关联阵的引入,使系统质量阵阶数减低,降低了求解规模。
3)对5R机械臂进行了刚柔耦合动力学分析,给出了动力学响应,可为机构的动态优化和控制提供理论依据。
4)此方法也可作为传统刚柔耦合动力学分析方法的一种补充。
[1]车仁炜,吕广明,陆念力.五自由度康复机械手的动力学分析[J].哈尔滨工业大学学报,2005,37(6):744-747.
CHE Renwei,LYU Guangming,LU Nianli.Dynamic analysis of a 5-DOF rehabilitative manipulator[J].Journal of Har-bin Institute of Technology,2005,37(6):744-747.
[2]陆念力,兰朋,金奕山.弹性连杆机构动力分析的一种新方法[J].中国工程机械学报,2003,1(1):6-10.
LU Nianli,LAN Peng,JIN Yishan.A new method to the dynamic analysis of flexible linkage mechanism[J].Chinese Journal of Construction Machinery,2003,1(1):6-10.
[3]GÖTTLICHER B,SCHWEIZERHOF K.Analysis of flexible structures with occasionally rigid parts under transient loading[J].Computers&Structures,2005,83(25/26):2035-2051.
[4]CHE Renwei,LU Nianli.An equivalent finite element method to kinetics analysis of complex mechanism[J].Journal of Harbin Institute of Technology,2005,12(2):197-200.
[5]车仁炜.机构动力学建模的等效元素集成法研究及其应用[D].哈尔滨:哈尔滨工业大学,2007:48-66.
CHE Renwei.Research of equivalent finite element integrated method to establish dynamics model of mechanism and it's application[D].Harbin:Harbin Institute of Technology,2007:48-66.
[6]周成,邵跃林.基于ADAMS与ABAQUS的刚柔耦合动力学分析方法[J].机械制造与自动化,2014,43(1): 131-133.
ZHOU Cheng,SHAO Yuelin.Dynamic analysis method of flexible multi-body system based on ADAMS and ABAQUS[J].Machine Building&Automation,2014,43(1):131-133.
[7]HUANG Yongan,DENG Zichen,YAO Linxiao.An improved symplectic precise integration method for analysis of the rotating rigid-flexible coupled system[J].Journal of Sound and Vibration,2007,299(1/2):229-246.
[8]陈思佳,章定国,洪嘉振.大变形旋转柔性梁的一种高次刚柔耦合动力学模型[J].力学学报,2013,45(2):251-256.
CHEN Sijia,ZHANG Dingguo,HONG Jiazhen.A high-order rigid-flexible coupling model of a rotating flexible beam under large deformation[J].Chinese Journal of Theoretical and Applied Mechanics,2013,45(2):251-256.
[9]夏拥军.计及二阶效应的柔性杆系动态分析及在起重机械中的应用[D].哈尔滨:哈尔滨工业大学,2007:51-58.
XIA Yongjun.Dynamic analysis with second-order EFFEC for flexible beam systems and its application in crane[D].Harbin:Harbin Institute of Technology,2007:51-58.
[10]JORGE A C.Complex flexible multibody systems with application to vehicle dynamics[J].Multibody System Dynamics,2001,6(2):163-182.
[11]CHEN J S,HUANG C L.Dynamic analysis of flexible slider-crank mechanisms with non-linear finite element method[J].Journal of Sound and Vibration,2001,246(3): 389-402.
[12]MINGHINI F,TULLINI N,LAUDIERO F.Vibration analysis with second-order effects of pultruded FRP frames using locking-free elements[J].Thin-Walled Structures,2009,47:136-150.
[13]王磊,赵新华.RRRT并联机器人的动力学研究[J].天津理工大学学报,2006(4):20-23.
WANG Lei,ZHAO xinhua.Study on the dynamics of 3-RRRT parallel manipulator[J].Journal of Tianjin University of Technology,2006(4):20-23.
[14]刘平安,方跃法,伍素珍,等.三自由度微动并联机器人的简化建模方法[J].中国机械工程,2006,17(24): 2251-2254.
LIU Ping'an,FANG Yuefa,WU Suzhen,et al.A simplemodeling method for 3 DOF micro-motion parallel manipulator[J].China Mechanical Engineering,2006,17 (24):2251-2254.
[15]高洪,赵韩.6-3-3并联机构逆动力学分析与仿真[J].农业机械学报,2007,9:130-133.
GAO Hong,ZHAO Han.Inverse dynamic analysis and simulation of 6-3-3 parallel mechanism with six-degree-of-freedom[J].Transactions of the Chinese Society for Agricultural Machinery,2007,9:130-133.
[16]QUARANTA G,MANTEGAZZA G,MASARATI P.Assessing the local stability of periodic motions for large multibody non-linear systems using proper orthogonal decomposition[J].Journal of Sound and Vibration,2004,271:1015-1038.
