挠性航天器轨控期间姿态容错控制
2015-03-16杨婧侯建文史小平
杨婧, 侯建文, 史小平
(1.哈尔滨工业大学 控制与仿真中心,黑龙江 哈尔滨 150080;2.上海航天技术研究院 上海 201109)
挠性航天器轨控期间姿态容错控制
杨婧1,侯建文2,史小平1
(1.哈尔滨工业大学 控制与仿真中心,黑龙江 哈尔滨 150080;2.上海航天技术研究院 上海 201109)
摘要:轨道调控期间,轨道控制推力会对挠性航天器的质心运动与姿态运动产生影响。针对轨道控制期间挠性航天器姿态控制系统的执行机构故障问题,提出了一种基于扩张状态观测器(extended state observer, ESO)的滑模容错控制算法。该算法将执行器故障,系统干扰及参数摄动量视为未知动态,通过设计相应的扩张状态观测器,能有效的实现对滑模状态量及未知动态的估计;在此基础上,利用未知动态的估计信息,设计了滑模容错控制控制律。最后,针对轨控期间反作用飞轮故障的挠性航天器姿态系统进行了仿真研究,仿真结果表明该算法能够有效处理执行器故障并使闭环系统稳定。
关键词:扩张状态观测器; 滑模容错控制; 挠性航天器; 执行器故障
侯建文(1960—),男,研究员,博士生导师,研究方向为航天器控制;
史小平(1965—),男,博士,教授,博士生导师,研究方向为飞行器智能控制、复杂系统仿真。
0引言
在轨航天器的工作任务复杂,工作环境恶劣,反作用飞轮作为航天器姿态控制系统的执行机构,其作用重大,一旦飞轮出现故障,姿态控制系统将无法正常工作甚至会造成一系列安全问题;此外,由于受到工作环境及研发成本的制约,使得硬件冗余在解决执行器故障问题方面的应用受限[1]。因此,为了提高航天器姿态控制系统的安全性和可靠性,并降低系统对硬件的依赖,亟需设计相应的容错控制策略,以保证航天器顺利完成工作任务。
容错控制的主要目的是在系统故障条件下,保证系统的稳定性并尽可能保证系统性能,主要分为被动容错控制和主动容错控制两大类[1]。在航天空之领域,关于星体容错控制的研究成果相当丰富[2-4]。其中被动容错控制由于实时性强,不需要故障诊断信息,鲁棒性好,控制器形式固定等优点而受到广泛关注,包括:变结构容错控制方法[6-7],反推容错控制理论[8],滑模容错控制算法[9-10]等。
挠性航天器在轨运行时,不仅会受到环境干扰力矩的影响,挠性附件的振动也会对姿态控制的精度产生影响。目前关于挠性航天器姿态控制已有众多研究成果[11-12],但对于轨道调控期间的挠性航天器研究成果则较少。进行轨道调控期间的挠性航天器,由于轨道控制推力会激起星体上挠性附件的振动,进而对航天器的质心运动与姿态运动产生影响,其中文献[13-14]给出了含轨道推力影响的挠性航天器姿态系统动力学模型。考虑到轨道推力控制期间挠性航天器所受到的扰动力矩已远大于其他运行阶段的扰动力矩[11-12],因此在设计容错控制及主动振动抑制策略时有必要将轨道推力的影响考虑进去。
扩张状态观测器具有良好的观测性能,它不仅能观测不确定对象的状态变量,并且能观测对象模型中内扰和外扰的实时控制量[15]。本文针对轨道控制期间反作用飞轮失效的挠性航天器姿态系统控制问题,在采用了飞轮冗余配置的条件下,基于扩张状态观测器理论设计了一种对故障不敏感的滑模容错控制器,该观测器能有效的估计执行器故障,外界干扰及系统参数摄动量。最后,将该方法用到含飞轮故障的挠性航天器姿态系统上,仿真结果表明能实现未知动态的精确估计并保证系统的稳定性。
1数学模型
1.1 系统动力学模型
当航天器进行轨道调整时,轨道推力会引起航天器挠性附件的振动,从而对航天器的质心运动与姿态运动产生影响,并引起航天器轨道与姿态运动的耦合[13]。挠性航天器轨道控制期间的系统动力学模型可表示为[1-2]

(1)

(2)

(3)


1.2 航天器运动学模型
姿态四元数描述的航天器姿态运动学方程可表示为
(4)

1.3 含执行器故障的姿态系统模型
考虑到航天器的转动惯量无法精确获得,不妨将其表示成以下形式
It=It0+ΔIt,
(5)
其中:It0表示转动惯量的标称值;ΔIt表示摄动值。



(6)

(7)
其中:



由式(7)可知

(8)
将式(6)带入式(8)得



RF+Lu+d,
(9)

在考虑执行器故障的条件下,式(9)可表示成


(10)
其中



Δ=diag(Δ1,Δ2,Δ3,Δ4)表示恒值偏差故障,E=diag(e1,e2,e3,e4)表示执行器的故障矩阵,ej表示失效因子且满足
进一步,式(10)可改写成式(11)


(11)
定义未知动态


(12)
由式(11)及式(12)可知

(13)
1.4 问题描述

2容错控制器设计
为了使姿态角及姿态角速度镇定到期望值,选取滑模变量如下
σ=ω+βq,
(14)
其中β>0。

由式(14)可知

(15)


(16)
v=-κ1σ-κ2sgn(σ)-f(t),
(17)
其中k1>0、k2>0为正常数。
注:考虑到故障情形下执行机构的有效控制部分为L(E-I4)u,而容错控制的前提为系统可控,因此,本文所考虑的执行器故障情形均满足系统可控条件。


图1 闭环姿态系统结构框图
2.1 基于ESO的未知动态估计
由式(16)可知,式(16)可以解耦成以下三个方程组

(18)

根据式(18),可构造如式(19)的二阶扩张状态观测器



(19)
其中β01、β02为观测器系数;g1i(e1i)、g2i(e1i)表示具有相应结构的非线性函数。



(20)
根据扩张状态观测器的收敛性理论可知:当函数满足条件
g1i(e1i)=e1i,
(21)

(22)
其中参数0<αi<1,τi>0,并且观测器系数β01、β02取适当值时,则状态估计误差有界收敛,并最终达到以下稳态

(23)
2.2 滑模容错控制
根据式(23)及式(17)的分析可知控制律v可选取为

(24)


(25)
其中κ1、κ2、κ3>0为正常数。
当控制量v满足式(25)时,系统的容错控制律可表示为


(26)
其中L+表示L的伪逆矩阵,并且满足L+=LT(LLT)-1。




(27)
3仿真研究
为了验证本文控制方法的有效性,本文对轨道控制期间,反作用飞轮故障条件下的挠性航天器姿态控制系统进行了仿真研究,控制参数选取如下:参数摄动量为20%,m=400 kg,ω(0)=[0.001-0.001 20.001 5]Trad/s,F=[111]TN,ωn=diag([0.77
1.11.88],Γ=diag([-0.023 40.004 22-0.003 9]),ε=diag([0.005 70.008 70.013]),q(0)=[0.250.470.53-0.660 1]T,


本文选取了执行器乘性故障和加性故障这两种故障类型,故障参数设置如下:

利用Simulink仿真软件,反作用飞轮故障条件下的控制效果如图2~图5所示。
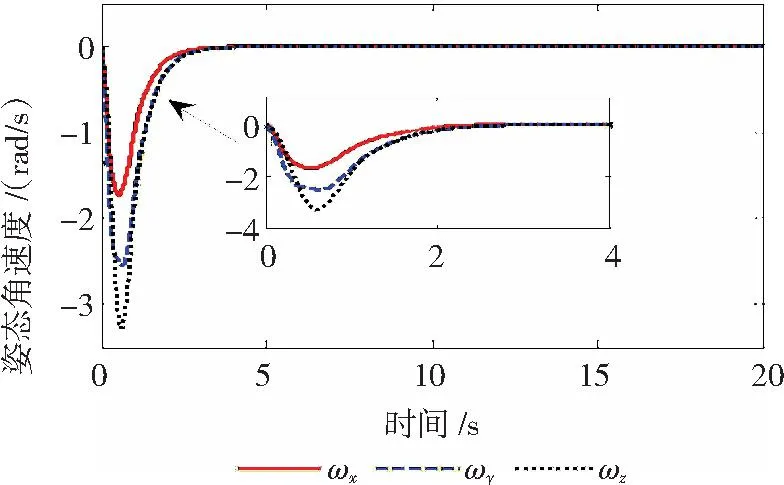
图2 姿态角速度响应曲线
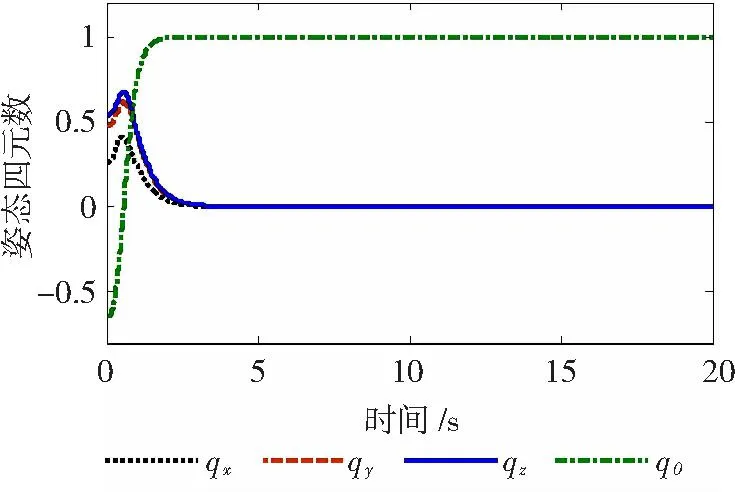
图3 姿态四元数响应曲线
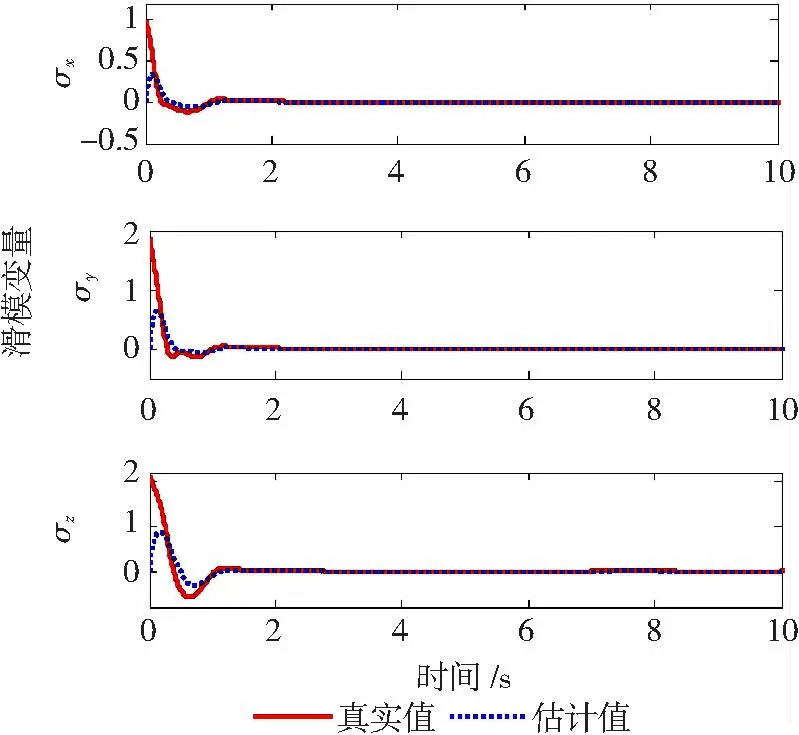
图4 滑模变量响应曲线
从图2和图3中可以看出,在本文所设计的容错控制器作用下,对执行机构同时出现故障状况:反作用飞轮1存在24 N·m的恒值偏差故障,反作用飞轮2损失20%控制能力并且存在6 N·m的恒值偏差故障,反作用飞轮3损失50%控制能力并且存在8 N·m的恒值偏差故障,反作用飞轮4完全失去控制能力并且存在10 N·m的恒值偏差故障,挠性航天器姿态控制系统能迅速稳定,并且姿态角及姿态角速度矢量均能收敛到期望值。
从图4和图5可以看出,在容错控制器的作用下,扩张状态观测器能够有效的观测滑模变量及未知动态的变化,具有良好的观测效果。
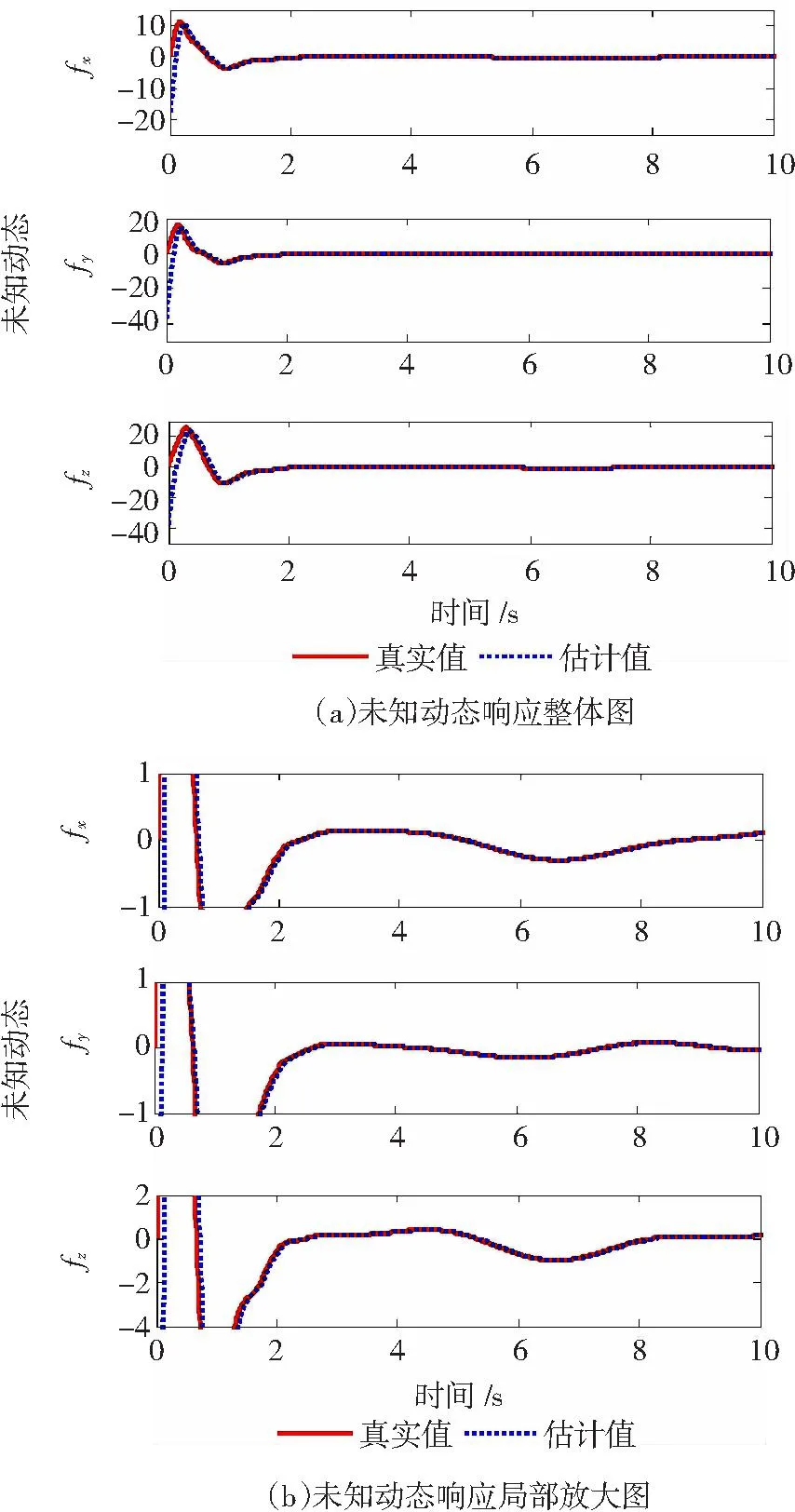
图5 未知动态响应曲线
4结论
针对轨道调控期间的挠性航天器姿态系统,研究了姿态控制系统反作用飞轮故障下的容错控制问题。本文将执行器故障、系统不确定性及系统内部和外部干扰视为未知动态,通过设计扩张状态观测器,能有效地估计滑模变量及未知态;在此基础上,结合未知动态的估计值,设计了一种对反作用飞轮故障不敏感的滑模容错控制器。仿真结果表明,该容错控制算法不仅具有良好的容错控制效果,还能有效地观测滑模变量及未知动态的变化。
参 考 文 献:
[1]张爱华,胡庆雷,霍星,等. 过驱动航天器飞轮故障重构与姿态容错控制[J]. 宇航学报, 2013, 34(3): 369-375.
ZHANG Aihua, HU Qinglei, HUO Xing, et al. Fault reconstruction and fault tolerant attitude control for over-activated spacecraft under reaction wheel failure[J].Journal of Astronautics, 2013,34(3):369-375.
[2]姜野. 控制受限的挠性航天器姿态容错控制[D]. 哈尔滨:哈尔滨工业大学, 2011.
[3]张娴,程月华,姜斌.轨控期间挠性航天器姿控系统的容错控制[J].航天控制, 2011, 29 (1): 41-47.
ZHANGXian, CHENG Yuehua, JIANG Bin. Adaptive backstepping fault-tolerant control for flexible spacecraft attitude control system during orbit control [J]. Aerospace Control, 2011, 29(1): 41-47.
[4]闫鑫. 基于滑模的航天器执行机构故障诊断与容错控制研究[D]. 哈尔滨:哈尔滨工程大学自动化学院,2014:10-12.
[5]霍星, 胡庆雷, 肖冰,等. 带有饱和受限的挠性航天器变结构姿态容错控制[J].控制理论与应用,2011,28(9):1063-1068.
HUO Xing, HU Qinglei, XIAO Bing, et al. Variable-structure fault-tolerant attitude control for flexible spacecraft with input saturation[J].Control Theory & Applications, 2011,28(9): 1063-1068.
[6]姜野, 胡庆雷, 马广富. 航天器时延自适应变结构容错控制[J].控制与决策, 2010, 25(5): 651-656.
JIANG Ye, HU Qinglei, MA Guangfu. Combined adaptive variable structure and time delay fault tolerant control for spacecraft[J]. Control and Decision, 2010, 25(5): 651-656.
[7]胡庆雷,张爱华,李波.推力器故障的刚体航天器自适应变结构容错控制[J].航空学报, 2013, 34(4): 909-918.
HU Qinglei, ZHANG Aihua, LI Bo. Adaptive variable structure fault tolerant control of rigid spacecraft under thruster faults[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(4):909-918.
[8]ALI I, RADICE G, KIM J. Backstepping control design with actuator torque bound for spacecraft attitude maneuver [J]. Journal of Guidance Control and Dynamics, 2010, 33(1): 254-259.
[9]程月华,姜斌,孙俊,等.基于滑模观测器的航天器姿态控制系统滑模容错控制[J]. 上海交通大学学报,2011,45(02): 190-194.
CHENG Yuehua,JIANG Bin,SUN Jun,et al. Sliding mode fault tolerant control for spacecraft attitude systems based on sliding mode observer[J].Journal of Shanghai Jiaotong University, 2011,45(02): 190-194.
[10]肖冰,胡庆雷, 霍星,等. 执行器故障的挠性航天器姿态滑模容错控制[J].航空学报, 2011,32(10): 1869-1878.
XIAO Bing, HU Qinglei, HUO Xing, et al. Sliding mode fault tolerant attitude control for flexible spacecraft under actuator fault[J], Acta Aeronautica et Astronautica Sinica, 2011,32(10): 1869-1878.
[11]朱良宽, 马广富, 胡庆雷. 挠性航天器鲁棒反步自适应姿态机动及主动振动抑制[J]. 振动与冲击, 2009, 28(2): 132-136.
ZHU Liangkuan, MA Guangfu, HU Qinglei. Attitude maneuvering and vibration damping of flexible spacecraft via robust adaptive backstepping technique [J]. Journal of Vibration and Shock, 2009, 28(2): 132-136.
[12]HU Qinglei, MA Guangfu. Variable structure control and active vibration suppression of flexible spacecraft during attitude maneuver [J], Aerospace Science and Technology, 2005, 90: 307-317.
[13]刘莹莹, 周军. 航天器轨道控制力对挠性帆板振动的影响[J]. 西北工业大学学报, 2009, 27(1): 61-65.
LIU Yingying, ZHOU Jun. Influence of spacecraft control force on its flexible solar panel during orbit maneuver[J]. Journal of Northwestern Polytechnical University, 2009, 27(1): 61-65.
[14]LIU Yingying, ZHOU Jun. Fuzzy attitude control for flexible spacecraft during orbit maneuver[C]//IEEE 6th International Conference on Mechatronics and Automation, August 9-12, 2009, Changchun, China. 2009:9-12.
[15]夏长亮,刘均华,俞卫,等. 基于扩张状态观测器的永磁无刷直流电机滑模变结构控制[J]. 中国电机工程学报,2006,26(20):139-143.
XIA Changliang, LIU Junhua, YU Wei, et al. Variable structure control of BLDCM based on extended state observer[J]. Proceedings of the CSEE, 2006, 26(20):139-143.
(编辑:张诗阁)
Fault tolerant attitude control of flexible spacecraft during orbit control
YANG Jing1,HOU Jian-wen2,SHI Xiao-ping1
(1.Control and Simulation Center, Harbin Institute of Technology, Harbin 150080, China;
2. Shanghai Academy of Spaceflight Technology, Shanghai 201109, China)
Abstract:The orbit control force would generate disturb torque which has impacts on the centroid and attitude motion of flexible spacecraft during spacecraft orbit maneuver. A sliding mode fault tolerant control approach was proposed based on an extended state observer (ESO) for the flexible spacecraft attitude control system with actuator faults during orbit control. In this approach, unknown actuator faults, internal and external disturbance, and parameter perturbation are considered as unknown dynamics. Based on the ESO design approach, sliding mode and unknown dynamics were effectively estimated, and sliding mode fault tolerant control approach was designed by using the estimating information. At last, the simulation results of flexible spacecraft were presented to demonstrate the effective of this approach.
Keywords:extended state observer; sliding mode fault tolerant control; flexible spacecraft; actuator faults
通讯作者:杨婧
作者简介:杨婧(1989—),女,博士研究生,研究方向为飞行器控制,容错控制;
基金项目:武器装备预研基金(9140A20040515HT01001)
收稿日期:2014-07-20
中图分类号:TP 302.8
文献标志码:A
文章编号:1007-449X(2015)07-0111-06
DOI:10.15938/j.emc.2015.07.017