内置式永磁同步电机弱磁过渡时的解耦补偿控制
2015-03-16毛亮亮梁悦王旭东
毛亮亮, 梁悦, 王旭东
(1.哈尔滨理工大学 电气与电子工程学院,黑龙江 哈尔滨 150080;
2.哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150001)
内置式永磁同步电机弱磁过渡时的解耦补偿控制
毛亮亮1,梁悦2,王旭东1
(1.哈尔滨理工大学 电气与电子工程学院,黑龙江 哈尔滨 150080;
2.哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150001)
摘要:针对内置式永磁同步电机(interior permanent magnet, IPM)在弱磁过渡时电流调节器瞬态饱和导致转速范围受限甚至失控的问题,提出了基于解耦电流控制和电压指令补偿的电流矢量控制算法,解除了电机高速运行时d-q轴电流交叉耦合的影响,使得控制规律趋于线性化,避免PI调节器输出不正常;当调节器饱和时,通过补偿电压指令使调节器迅速退出饱和状态,消除了转速调节失控现象。给出了判断电流调节器是否进入饱和的监视方法,实时决定是否有必要采取退饱和的措施,使得控制更具智能特点。在仿真结果的正确性基础上,通过台架测试进一步证实了所提出控制策略的有效性,提高了系统的稳定性并拓宽了电机的转速范围。
关键词:永磁同步电机; 弱磁过渡; 解耦控制; 电压指令补偿; 电流调节器饱和
梁悦(1994—),女,本科,研究方向为先进控制理论及应用;
王旭东(1956—),男,教授,博士生导师,研究方向为电力电子、汽车电子、新能源汽车整车控制。
0引言
内置式永磁同步电动机的诸多优点使其被广泛应用于工业生产当中,尤其在要求恒定转矩、高速运行的伺服驱动系统中更是备受青睐。IPMSM具有特殊的转子结构,通过转子磁路结构的不对称性产生的磁阻转矩,有助于提高电机的过载能力和功率密度,并且很容易通过改变电枢反应电流来实现弱磁控制,从而拓宽电机的速度运行范围。近来,由电流型PWM逆变器驱动的永磁同步电动机因其高效的人机交互性能,使其在快速发展的电动车产业获得广泛关注。 TM JAHNS曾在他的论文中说,永磁同步电动机是调速电机的理想选择[1],在他此番言论之后,多篇针对永磁同步电动机控制策略的论文相继发表[2-5]。
由于IPM电机的有效气隙较小,电枢电感相对较大,所以由d轴和q轴电枢反应所引起的磁饱和以及交叉饱和负面影响明显,这将损害电机的电流控制性能。当发生由低速到高速的过渡时,端电压几乎是逆变器的最大输出电压值,这时指令电压矢量 偶尔会在瞬态超过最大可用电压,导致控制逐渐失控。在这种情况下, d轴和q轴电流调节器已经饱和并且相互影响。其结果是,电流和速度的响应变差,并引起较大的转矩脉动。
文献[6]提出运用抗饱和积分器快速调整定子电流矢量的超前角弱磁方法,使电机在基速附近平稳而快速地切换。文献[7]通过输出电压梯度下降法以及设定电流修正值的弱磁方法。文献[8]运用q电压来控制d电流,将交轴电压的期望值与反馈值作差,计算得到弱磁电流误差信号的方法。文献[9]根据最大负载角的存在和逆变器及电机的电流电压限制,提出了在限制条件下的永磁电机直接转矩弱磁控制的运行分析。文献[10-11]根据电机反电势、定子磁链等参数的特性,设计了考虑电机参数以及干扰因素的控制器模型。大量的研究表明,对永磁同步电机弱磁控制的研究和改进具有重要意义。
本文对逆变器饱和的本质特征进行了研究。定义电动机端电压值比来确定弱磁运行区域。引入了电流解耦和电压指令补偿算法的新型弱磁控制方法。并且针对IPM电机进行了仿真和台架试验。
1永磁同步电机数学模型
永磁同步电动机在d-q同步旋转坐标系下的定子电压和转矩方程为

(1)

(2)
式中:ud、uq分别为d、q轴电压;id、iq分别为d、q轴电流;Ld、Lq分别为d、q轴电感;R为定子电阻;ψf为永磁体磁链;ω为转子电角速度,p=d/dt。
2理论描述与策略分析
2.1 电压与电流极限
对于逆变器驱动的IPM电机来说,电枢电流Ia以及端电压Va要受其极限的限制,综合考虑以上两因素,所以当电机稳定运行时各分量不能超过两个极限的交集

(3)

(4)
其中,Iam为电机稳定并连续运行时的电枢电流最大值,或者是逆变器短时间内可输出的最大值;Uam是逆变器根据母线电压所能给出的最大端电压值。图1给出了在式(3)与式(4)的限制条件下的id、iq关系。在电机转速较低时,电流极限是主要限制因素,随着转速的升高交集逐渐变小,电压极限起主要限制因素,当升速过程中端电压无限接近其最大值时,会出现电流调节器饱和的情况,此时就要引入弱磁算法。
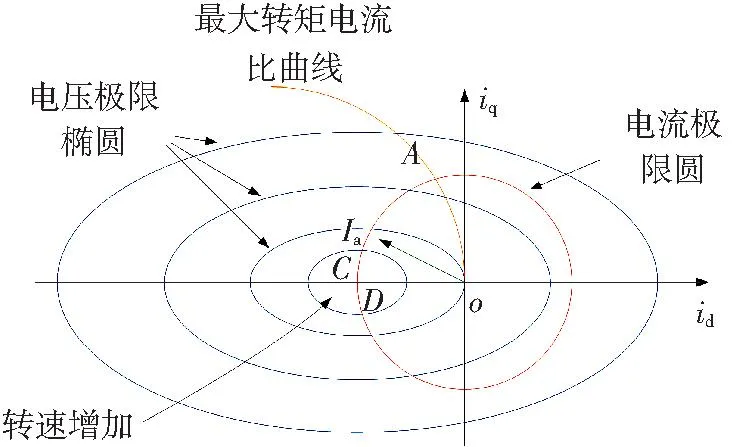
图1 电压和电流极限
2.2 矢量控制理论
在恒转矩区,通过最大转矩电流比控制策略(MTPA)来利用电机凸极性所产生的磁阻转矩,从而可以获得最大电机扭矩。其id和iq关系为
(5)
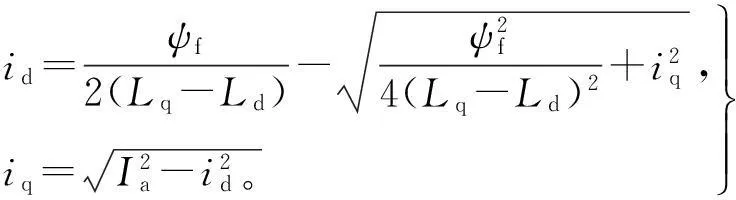
图1中描绘了MTPA曲线轨迹,当电枢电流Ia达到最大值Iam时,产生最大转矩Tmax,此时的id和iq关系可表示为

(6)
在弱磁恒功率区域,因为电流矢量始终在电压极限椭圆上运行,故可以从Ua=Uam获得电流矢量的轨迹为

(7)
为了简化控制算法,电压极限椭圆可代替为

(8)
其中,udo=-ωLqiq,uqo=ωψf+ωLdid,Uom=Uam-RIam。在弱磁区,通过控制d-q轴电流分量使得Uo=Uom。如果按式(7)来控制电流,那么稳态时的端电压Ua则会始终被限制在Uam内。故在一定转速下,电流矢量所能产生最大转矩的点即是两种极限曲线的交点,如图1中由A-C所组成的点簇。
2.3 过渡模式分析
当电机运行在基速以下时,根据式(5),电流矢量会沿着最大转矩比电流曲线一直达到A点,保持最大扭矩输出,并随着转矩变化逐渐进入稳态。随着速度的增加相电压逐渐接近逆变器可输出最大值,此时电流调节器进入饱和,必须引入弱磁控制,使电流矢量首先继续沿着电流极限圆运行,再后转入最大转矩比电压曲线(图1中由C-D)。通过监测电流和转速,在研究了传统的决定恒转矩区和恒功率区之间过渡点方法的基础上,本文提出了一种不同的方法来定义过渡点。
选取电机的端电压比K作为逆变器饱和与否的指标。它被定义为在负载端电压和空载端电压的比值,如

(9)
从式(9)中可以看出,终端电压比K的轨迹与电压极限椭圆具有相同的表达式,所以可得如下的逆变器饱和判定条件:
如果K≤Uam/ωψf, 则逆变器未饱和;反之,如果K>Uam/ωψf, 则逆变器饱和。该方法只需检测电枢电流,不涉及任何电流控制手段,也可以应用于其他的控制策略中。
3电压补偿的解耦控制算法
3.1 解耦电流控制
由于交叉耦合效应导致不能通过控制ud和uq来单独控制d-q轴电流。IPM电动机具有较大的电感,使得这种交叉耦合作用很显著,并会随着转速的增加更为严重。在高转速时电流和转矩都会受其影响而变坏。这种交叉耦合效应可通过前馈补偿来克服,如图 2所示。文中电流调节器Gd(s),Gq(s)采用PI 控制。此时的d-q轴电压期望值输出方程变为
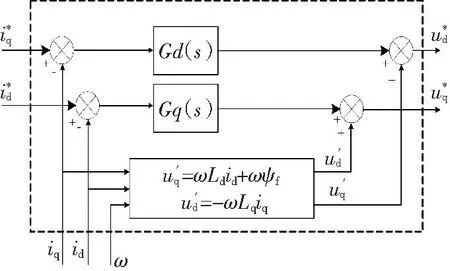
图2 解耦电流算法框图

(10)
将其带入到式(1)并整理,得到

(11)
将耦合项ωLq和ω(Ld+ψf)分别补偿到相应ud和uq上,使其具有线性的特征方程,此时d-q轴电流控制环已经线性化,并可单独控制。但是公式中还涉及电感量,而电机的电感值通常随电流的变化而变化,如若认为是固定值则会导致解耦不准确。所以将补偿量重新定义如下为
(12)
从d-q轴给定电流与反馈电流的偏差处引入外部解耦支路来抵消电压方程中的耦合部分。则图2的框图结构变为图3。
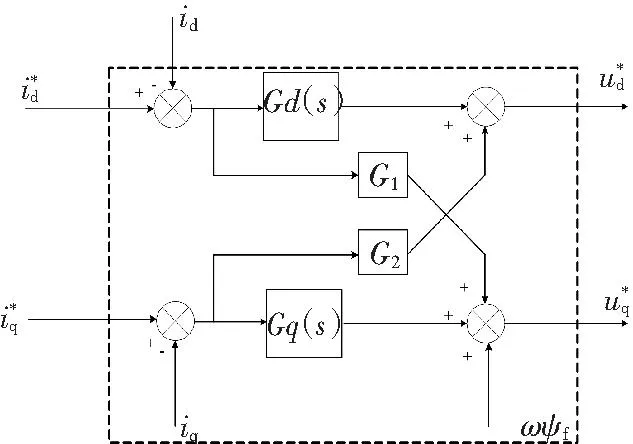
图3 改进解耦电流算法框图
电流控制器为PI电流调节器Gi(i=d,q)和解耦控制器(G1,G2)的混合型结构。假设反电动势项ωψf已完全补偿,由上图可知系统的控制方程为
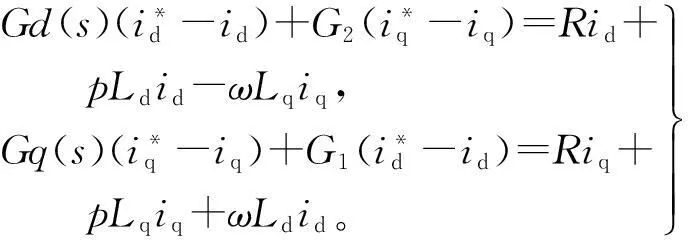
(13)
求得

(14)
整理得
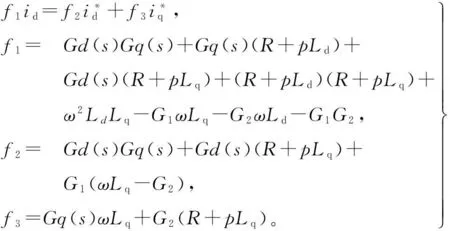
(15)

(16)
3.2 电压指令补偿

图4 电压指令补偿流程图
Fig. 4Flowchart of voltage command
compensation algorithm

图5 电压退饱和矢量图
4仿真结果与分析
在SIMULINK下建立了系统的仿真模型。仿真系统中参数与台架电机一致,为p=4(极对数),Rs=24 mΩ,ψf=0.071 Wb,Ld=0.22 mH,Lq=0.61 mH。设定电机转动惯量J=3.2×10-3kg·m2,无相对摩擦,直流电压Udc=320 V,PWM载波频率10 kHz, 参考转速speedref=1 000转/分,仿真时间为0.03 s。
图6、图7是分别采用传统PI调节和解耦补偿算法时的电流曲线对比,图6中电机以负载40 N·m启动,由图中可见,采用PI调节时,启动过程中d、q轴电流波形存在较大波动,且进入稳态较慢,稳态时电流实际值与目标值存在稳态误差,跟踪效果不理想;采用本文所提出的控制方法时,电流跟踪效果明显改善,并且能够快速进入稳态。

图6 两种控制方法的d-q电流曲线对比
Fig. 6Comparison of d-q current responses between
different control methods
图7中电机以10 N·m负载转矩启动,t=0.015 s时将负载增至20 N·m,可以看出采用PI调节时,电机启动过程中相电流波形有明显的波动,且进入稳态调节时间较长,所以突增负载时会引起明显的转速跌落,且不能够在较短的时间内恢复;采用本文提出的方法时,启动过程中相电流波形平稳,进入稳态快,对突增负载鲁棒性强。
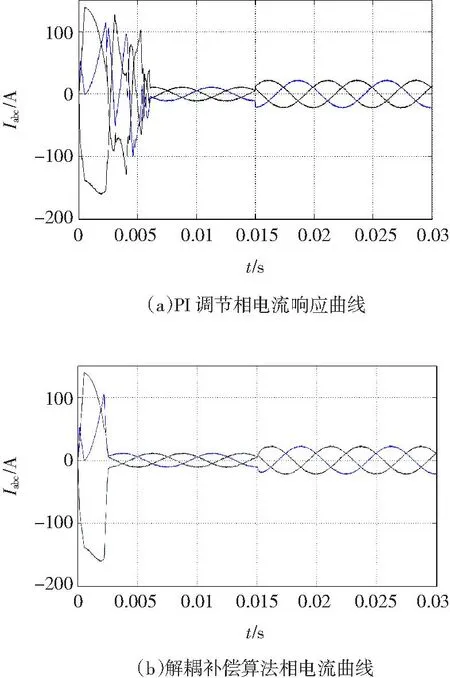
图7 两种控制方法的相电流曲线对比
Fig. 7Comparison of phase current responses
between different control methods
5实验结果与分析
实验中,电机带40 N·m负载转矩启动。
图8是电机由静止启动时的电流波形,可以看出,解耦补偿后的方法输出的d、q轴电流波形抖动较小、跟踪更加平稳。当转速达到目标值时,由于电流给定值迅速减小,而传统的PI调节无法使实际电流在高转速下准确追踪迅速变化的给定值,造成电流失调的现象。
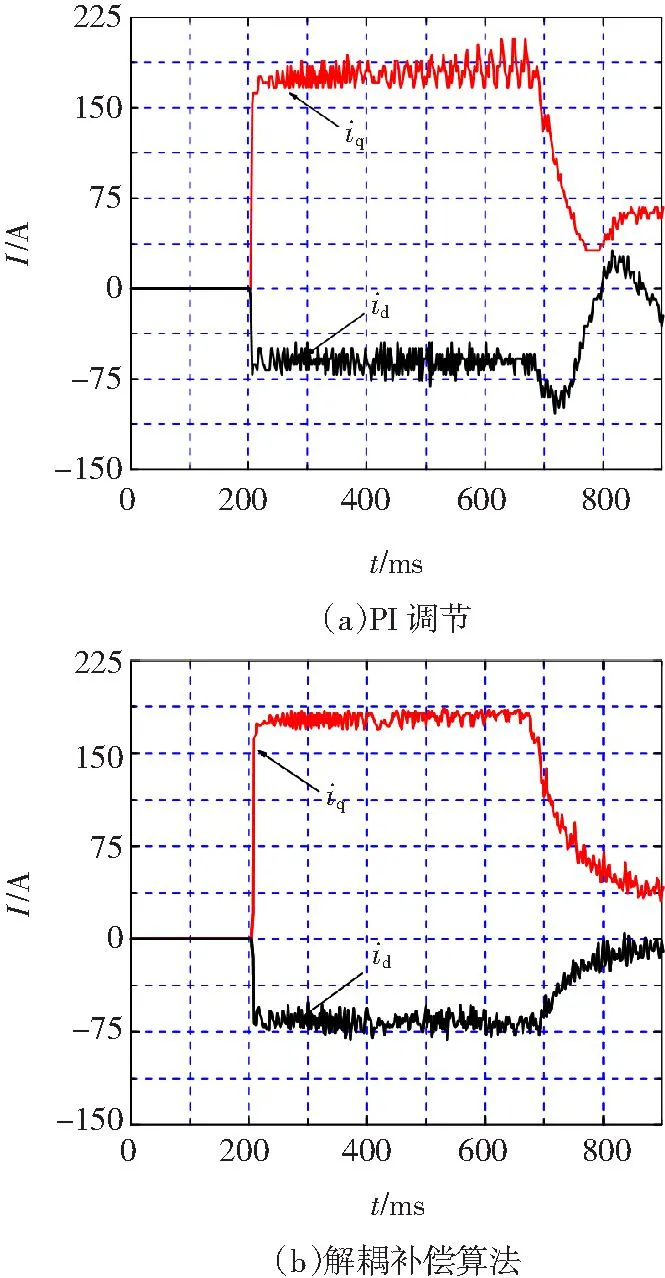
图8 d-q轴电流响应实验对比图
图9是电机输出转矩的波形。由于转矩是电流的函数,因此转矩波形效果与电流波形相似。
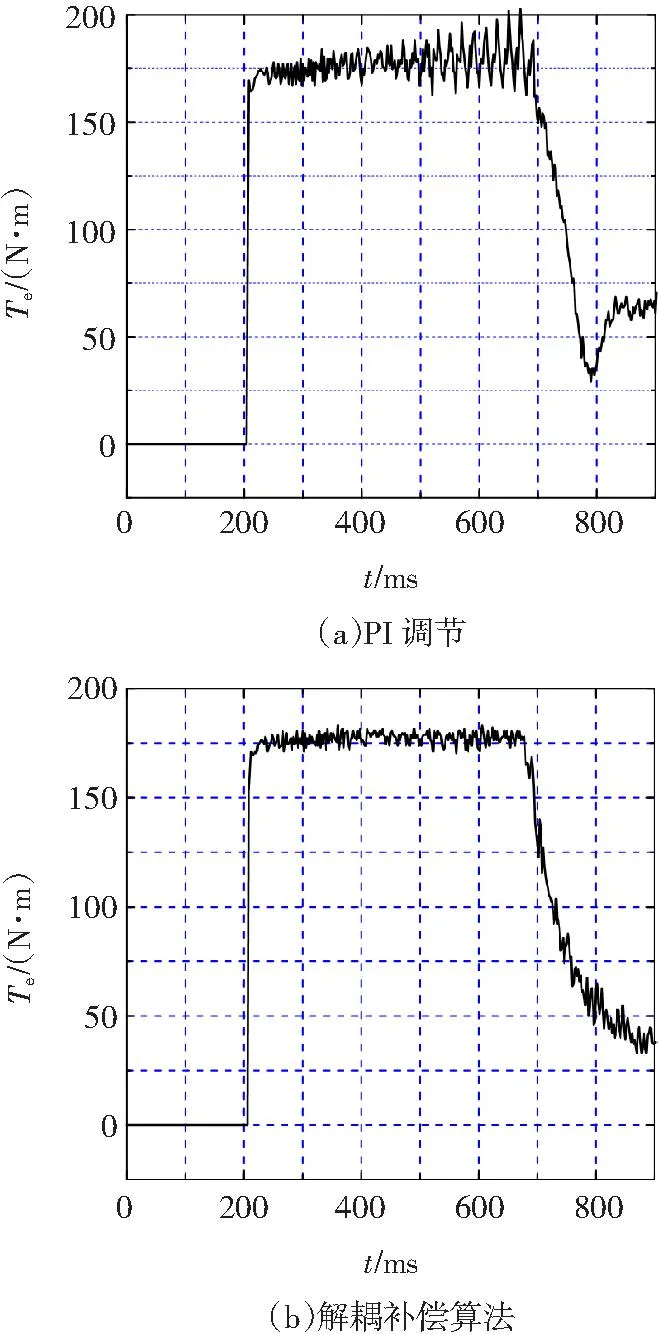
图9 转矩曲线对比图
图10为两种方法下的转速对比图。可以看出,PI控制时转速波形有明显超调;采用本文所提方法时转速波形相对平稳,无超调,且能快速进入稳态,动态响应特性较好。
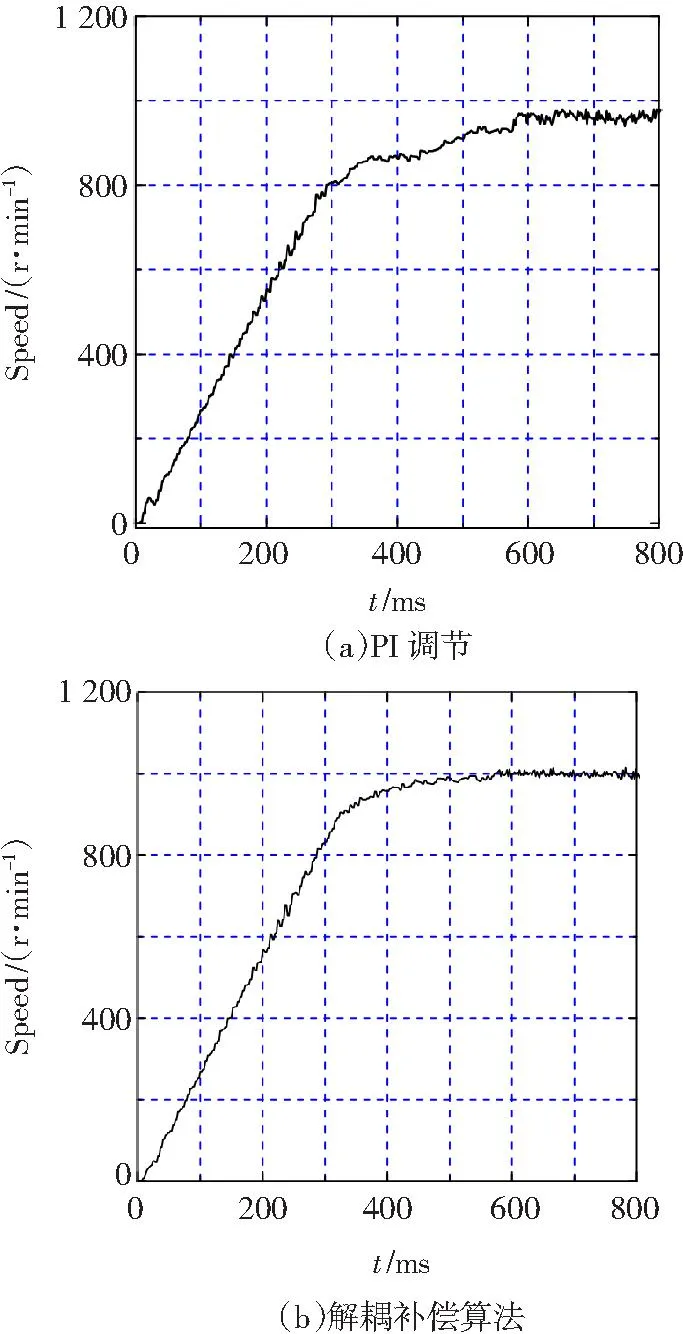
图10 转速响应曲线对比图
图11、图12分别是实测电机相电流对比曲线,可以看出利用本文所提出的方法在改善谐波和抑制超调方面都有显著的效果。
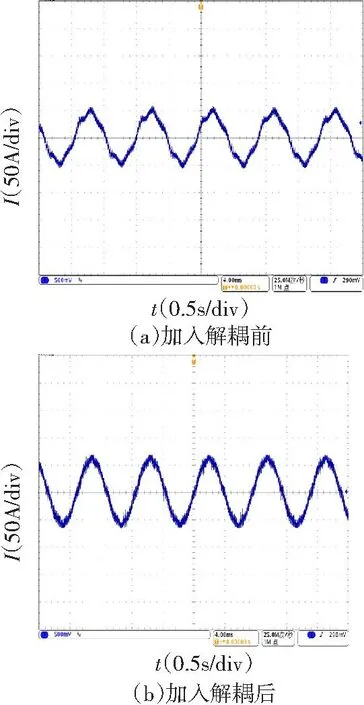
图11 加入解耦算法前后电流对比图
Fig. 11Comparison of phase current between introducing
decoupling strategy or not

图12 加入电压补偿算法前后电流对比图
Fig. 12Comparison of phase current between introducing
voltage compensation or not
6结论
本文对逆变器饱和的本质进行了研究。定义电动机端电压值比来确定弱磁运行区域。提出了电流解耦和电压指令补偿算法的新型弱磁控制。并且针对IPM电机进行了仿真和台架试验,结果表明该方法有助于改善电机在过渡阶段的调节器饱和导致的电流失控情况,提高了系统的稳定性,在工程实践中具有应用价值。
参 考 文 献:
[1]LAWLER JS, JOHN McKeever.Minimum current magnitude control of surface PM synchronousmachines during constant power operation[J]. IEEE PowerElectronics Letters, 2005, 53-56.
[2]TEIAR H, CHAOUI H, SICARD P. PMSM control based on adaptive fuzzy logic and sliding mode[C]//Industrial Electronics Society, annual conference of IEEE,Nov.10-13,2013,Vienna,Austria. 2013: 3048-3053.
[3]BOLOGNANI S,PETRELLA R,PREARO A,et al.Automatic tracking of MTPA trajectory in IPM motor drives based on AC current injection[J]. IEEE Transactions on Industrial Applications,2011,47(1): 105-114.
[4]JIN Ningzhi,WANG Xudong,WU Xiaogang.Current sliding mode control with a load sliding mode observer for permanent magnet synchronous machines [J].Journal of Power Electronics,2014,14(1): 105-114.
[5]MORIMOTO S, TAKEDA Y, HIRASA T. Expansion of operating limits for permanent magnet by current vector control considering inverter capacity[J]. IEEE Transactions on Industrial Applications, 1990, 26(5): 866-871.
[6]郭仲奇, 罗德荣, 曾智波,等. 一种新的内置式永磁同步电机弱磁控制方法[J]. 电力电子技术,2011, 45(3): 44-47.
GUO Zhongqi, LUO Derong, ZENG Zhibo, et al.A new flux-weakening method of built-in permanent magnet synchronous motor[J]. Power Electronics, 2011, 45(3): 44-47.
[7]唐朝晖, 丁强, 喻寿益,等. 内埋式永磁同步电机的弱磁控制策略[J]. 电机与控制学报,2010,14(5): 68-72.
TANG Zhaohui, DING Qiang, YU Shouyi, et al. Flux-weakening control strategy of built-in permanent magnet synchronous motor[J]. Electric Machines and Control,2010,14(5): 68-72.
[8]陈宁, 张跃, 桂卫华,等. 内埋式永磁同步电机驱动系统的弱磁控制[J].控制理论与应用,2013, 30(6): 717-723.
CHEN Ning, ZHANG Yue, GUI Weihua, et al. Flux-weakening control of built-in permanent magnet synchronous motor driving system[J]. Control theory and applications, 2013, 30(6):717-723.
[9]窦汝振, 温旭辉.永磁同步电动机直接转矩控制的弱磁运行分析[J].中国电机工程学报,2005,25(12): 117-121.
DOU Ruzhen, WEN Xuhui. Flux-weakening operarion analysis of permanent magnet synchronous motor based on direct torque control[J].Proceedings of the CSEE,2005,25(12): 117-121.
[10]王莹, 唐任远, 曹先庆,等. 内置式永磁同步电动机弱磁控制实验研究[J]. 微电机,2008,41(11): 1-4.
WANG Ying, TANG Renyuan, CAO Xianqing, et al. Experiment research of built-in permanent magnet synchronous motor based on flux-weakening control[J]. Micromotors Servo Technique, 2008,41(11): 1-4.
[11]冯江华, 桂卫华, 许峻峰. 考虑参数变化的永磁同步电动机弱磁控制研究[J]. 微电机,2008,41(4): 28-31.
FENG Jianghua, GUI Weihua, XU Junfeng. Flux-weakening control research of permanent magnet synchronous motor considering parameteres variation[J]. Micromotors Serve Technique, 2008,41(4): 28-31.
(编辑:刘琳琳)
Decoupling and compensation strategy for interior PMSM in transitional region of flux-weakening
MAO Liang-liang1,LIANG Yue2,WANG Xu-dong1
(1.School of Electrical & Electronic Engineering, Harbin University of Science and Technology, Harbin 150080, China;
2.School of Astronautics,Harbin Institute of Technology,Harbin 150001,China)
Abstract:For interior permanent magnet (IPM) synchronous motor, the transient saturation of current regulator during flux weakening transition results in the speed range limitation or losing control. In order to solve the problems, a current vector control algorithm based on the current decoupling control and voltage command compensation was proposed, the cross-coupling effect of motor d-q axis currents was eliminated when running at high speed, making control law linearizable and abnormal PI regulator output was avoided; when regulator is saturated, by compensating voltage command, the regulators are out of saturation quickly, the speed control runaway was eliminated.The monitoring method was analyzed to judge if the current regulator is into saturation in real time to decide whether it is necessary to take measures to desaturate, making control be featured by intelligence.On the basis of correctness of simulation results, by bench testing the effectiveness of the proposed control strategy is confirmed, the stability of the system is improved and the range of motor speed is broadened.
Keywords:interior permanent magnet synchronous machine; flux-weakening transition; decoupling control; voltage command compensation; current regulator saturation
通讯作者:毛亮亮
作者简介:毛亮亮(1987—),男,博士研究生,研究方向为永磁同步电机控制;
基金项目:黑龙江省应用技术研究与开发计划项目(GB13A202)
收稿日期:2014-08-05
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2015)07-0014-07
DOI:10.15938/j.emc.2015.07.003