一种用于平衡三电平逆变器中点电位的滞环控制+精确控制策略研究
2015-03-16王建渊雷国惠钟彦儒
王建渊, 雷国惠, 钟彦儒
(西安理工大学 电气工程系,陕西 西安 710048)
一种用于平衡三电平逆变器中点电位的滞环控制+精确控制策略研究
王建渊,雷国惠,钟彦儒
(西安理工大学 电气工程系,陕西 西安 710048)
摘要:中点电位不平衡是二极管中点箝位(NPC)型三电平逆变器存在的固有问题,在学术及工程实践中受到了广泛关注。中点电位平衡控制方法可以分为两大类,硬件和软件方法,基于硬件的控制方法主要是依靠外部电路调整,一般通过Boost和Buck等电路对电容进行充放电来调节中点电位以达到平衡,因而增加了整个逆变器的成本。在深入分析引起中点电位不平衡因素的基础上介绍了一种提高中点电位鲁棒性的滞环控制+精确控制策略。该控制策略将滞环控制与精确控制方法相结合,设置一定的环宽作为两种算法的切换条件,超出设定环宽使用滞环控制,在环宽内使用精确控制方法。进行了仿真和实验验证,结果证明该方法解决了滞环控制粗略、存在控制盲区并且控制效果受功率因数影响大的问题,同时弥补了精确控制中当中点电压发生偏移以后不具备将中点电位拉回平衡点的能力。有效地抑制中点电位波动,提高中点电位控制的鲁棒性。
关键词:中点电位; 不平衡; 鲁棒性; 滞环控制; 精确控制
雷国惠(1989—),女,硕士研究生,研究方向为NPC背靠背三电平逆变器中点控制策略;
钟彦儒(1950—),男,教授,博士生导师,研究方向为新型电力电子装置,高性能电机控制策略。
0引言
NPC型三电平电压源型逆变器(VSI)相对于传统的两电平逆变器具有对开关器件耐压等级要求降低至一半;增加了一个输出电平,减小了du/dt;谐波畸变更低,THD更小等显著的优点。从而在中高压变频调速、有源电力滤波装置和电力系统无功补偿等领域有着广泛的应用前景。NPC 型三电平逆变电路的中点电位平衡问题受到广泛关注[1-7]。中点电位平衡控制方法可以分为两大类,硬件和软件方法[8]。基于硬件的控制方法主要是依靠外部电路调整,一般通过Boost和Buck等电路对电容进行充放电来调节中点电位以达到平衡,因而增加了整个逆变器的成本,故目前采用软件算法居多。软件算法实现目前主要有两种思路,即基于空间矢量调制的PWM法SVPWM)和基于注入零序电压的载波调制法。其采用比较多的是基于SVPWM法通过改变冗余小矢量作用时间的滞环控制和精确控制。滞环控制通过设置一定的滞环区间,当中点电位超出该区间时,根据偏移方向调整正负小矢量作用时间来进行补偿修正。滞环控制方式简单实用,但控制比较粗,存在控制盲区。精确控制算法是通过对中点电荷量的精确计算,得出冗余小矢量的作用时间,实现对中点电压平衡的控制。该算法控制精度高,但是一旦中点电压发生偏移以后就不具备将中点电位拉回平衡点的能力。
为了解决上述滞环控制与精确控制算法单独作用下所存在的不足,提出一种滞环控制+精确控制策略。该控制策略通过设置一定的环宽作为两种算法的切换点,超出设定环宽使用滞环控制,在环宽内使用精确中点控制,解决了滞环控制粗略、存在控制盲区并且控制效果受功率因数影响大的问题又可以弥补精确控制中当中点电压发生偏移以后不具备将中点电位拉回平衡点的能力。更加有效的抑制中点电位波动,提高中点电位的鲁棒性,具有重要的实际工程价值。
1三电平逆变器中点电位不平衡原理
以三电平NPC型逆变器为例,分析中点电位不平衡的原理[1]如图1所示。
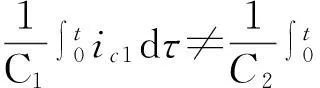
由图1分析可知,直流母线电容电压有如下关系式:

(1)

(2)
式中:ic1,ic2为流过电容C1,C2上的电流,Vc10,Vc20为电容电压初始值。
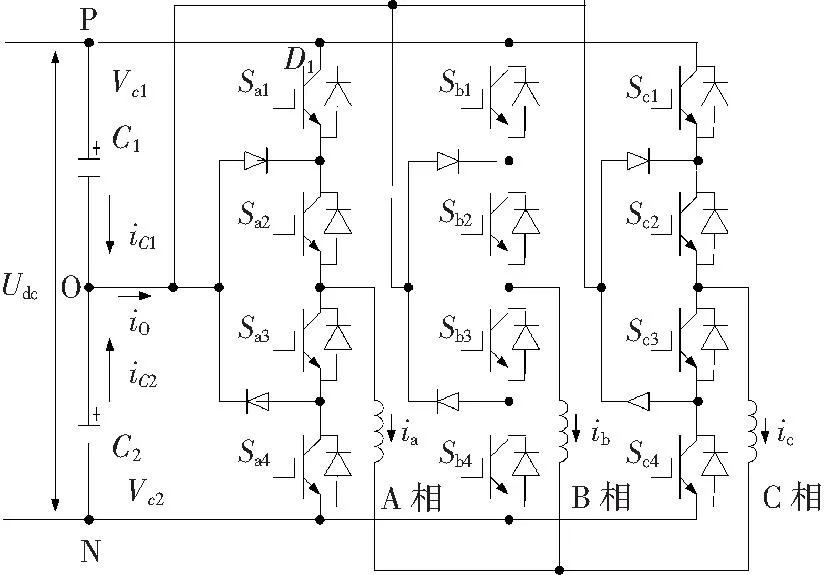
图1 中点电位分析图
2传统中点电位平衡控制方法
传统的中点电位平衡控制方法主要有[6]滞环控制,精确控制,PWM补偿法,这些控制方法均能达到一定的控制效果,但也均存在控制上的不足。其各种方法的性能比较如表1所示。

表1中点电压控制方法对比
在上表所示的控制方式中,目前采用较多的是滞环控制和精确控制方法,下面简要介绍这两种控制方式的原理。
2.1 滞环控制方法
由于电压小矢量总是成对出现,正负小矢量对于输出电压的作用是相同的,而对于中点电压的作用恰好是相反。在三电平逆变器调制方法中,采用平衡中点电压的方案大多数都是基于对一对冗余小矢量的控制,对于中矢量是无法直接实施控制的,滞环控制就是如图2所示对中点电位设置一定的滞环区间[-d,d](滞环区间的选取要平衡考虑其对中点电位波动的影响和对开关频率的影响),当中点电位超出该区间时,根据偏移方向通过调整正负小矢量的作用时间来平衡中点电位。

图2 滞环控制原理图
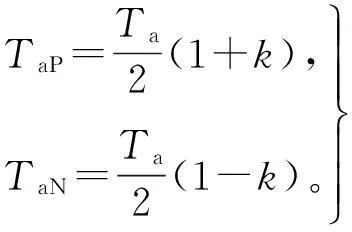
采用中点电压反馈控制。通过调整P型和N型小矢量开关状态的时间,控制中点电压Vnp
Ta=TaP+TaN。
(3)
(4)
式中:Ta为小矢量作用时间;TaP为正小矢量作用时间;TaN为负小矢量作用时间;k为调节因子。
例如参考矢量位于扇区Ⅰ的A区域,如果首发矢量是正小矢量则输出矢量的次序为POO-OOO-OON-ONN-OON-OOO-POO,则具体三相输出时序图如图3所示。
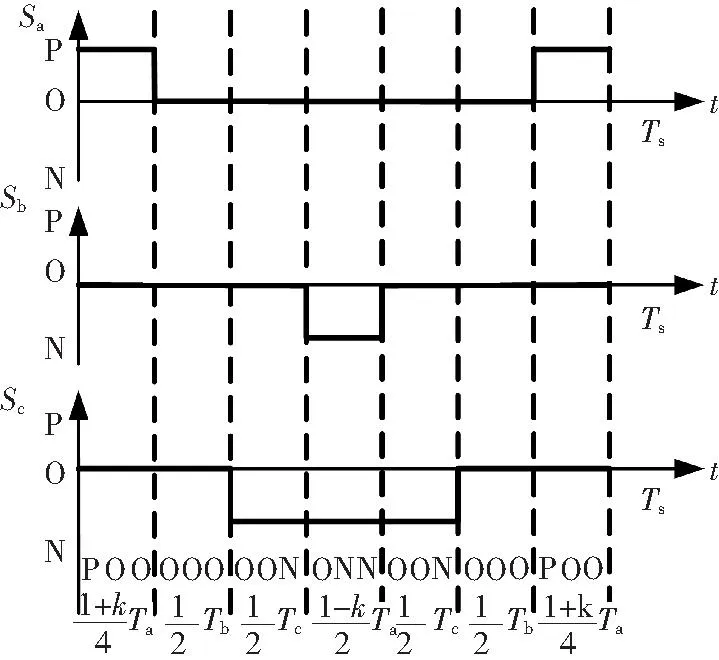
图3 扇区ⅠA区域输出电压矢量时序图
Fig. 3The timing diagram of output voltage
vectors in sector Ⅰtriangle A
加入调节时间因子k,根据检测到的直流侧电容电压Vc1和Vc2来及时的调整时间因子k,可以使中点电压偏移减小,为了防止电压幅值跳变设定调节因子范围0.25≤k≤0.75。
滞环控制是最简单也是最实用的中点电压闭环控制策略。使用这种方法只需要检测直流母线电压和直流侧单电容上的电压,当两电容压差超出环宽[-d,d]时,则使中点电压趋于平衡位置的小矢量将会被选择作用,算法简单易行。滞环控制是一种近似的定性的调节方案,并且实际控制效果与功率因数关系密切,在功率因数越低的情况下,中点控制的效果越不理想。由于此控制方式存在控制盲区,因此仍然会存在一定的中点电压波动。
2.2 精确控制方法
中点电压的精确控制是通过对中点电荷量的精确计算,得出冗余小矢量的作用时间,实现中点电压平衡的控制。中点电压精确控制算法的思路就是注入或者抽出适当的中点电荷,使得中点电压在一个控制周期Ts内尽量向平衡点靠拢。设直流侧电容电压的偏差为:
Voffset=Vc1-Vc2。
(5)
这时流进中点的电荷量应为:
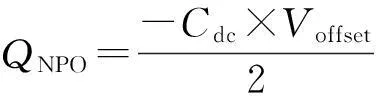
(6)
式中;Cdc为直流侧电容容值;Vc1,Vc2分别为上,下直流直流母线电容上的电压。
在传统SVPWM调制策略下的空间电压矢量分布图如图4所示,当参考电压矢量Vref位于三角形区域A或B时计算冗余矢量作用时间需要考虑瞬时中点电流的极性,为了简化控制算法,两对冗余小矢量的作用时间调节因子k选取原则为:
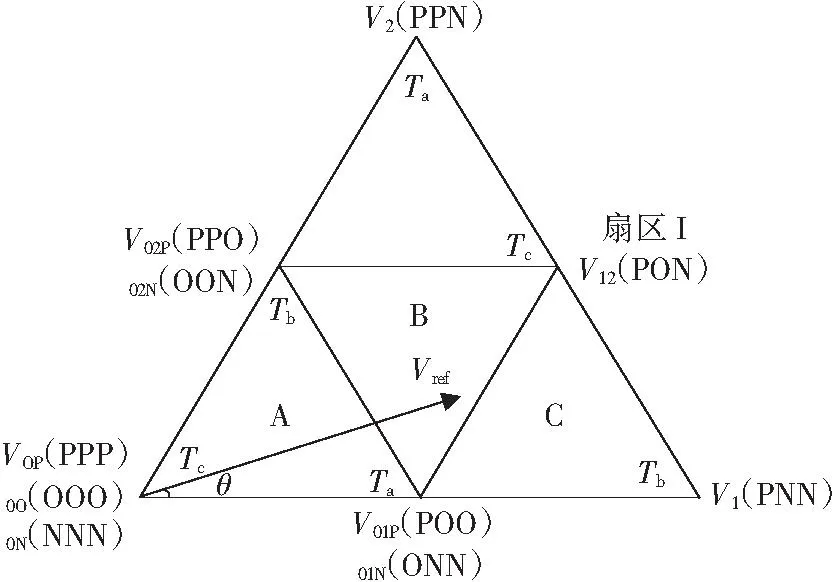
图4 扇区I中的矢量及时间分配图
1)假设2个P型小矢量作用时流进中点电流的极性相同,则:
tpa=k×ta,
tna=(1-k)×ta,
tpb=k×tb,
tnb=(1-k)×tb。
(7)
2)如果2个P型小矢量作用时流进中点电流的极性相反,则:
tpa=k×ta,
tna=(1-k)×ta,
tpb=(1-k)×tb,
tnb=k×tb。
(8)
其中tpa、tpb和tna、tnb分别为两对冗余小矢量中正、负小矢量的作用时间。根据对中点电流数学建模分析可列出下表2。
表2冗余小矢量作用流入中点的电流
Table 2Current feed to neutral-point when
redundancy little vectors operating
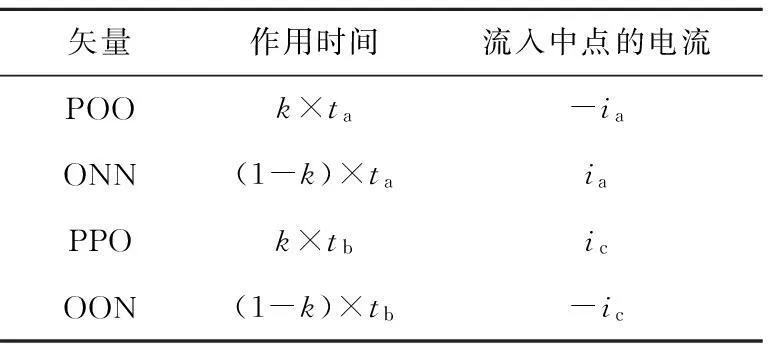
矢量作用时间流入中点的电流POOk×ta-iaONN(1-k)×taiaPPOk×tbicOON(1-k)×tb-ic
则在一个控制周期里流入中点的平均中点电荷为:
QNP=k×ta(-ia)+(1-k)×taia+k×tbic+(1-k)×tb(-ic)。
(8)
令QNP=QNPO,可以推得下式:

(9)
其他条件不变,如果两个P型小矢量作用时流进中点电流的极性相反,同理可得
QNP=k×ta(-ia)+(1-k)×taia+(1-k)×tbic+k×tb(-ic)。
(10)
令QNP=QNPO,可以推得下式:
(11)
当参考电压矢量Vref位于其他区域时,通过同样的方法可求得调节因子k的计算公式,在此就不再赘述。
实际上,如果能够保证每一个采样周期内流入中点的总电荷量为零,即流进或流出中点的电流与作用时间的乘积为零。就必然可以实现中点电位的精确控制,但是由于外在原因:1)电容的制造工艺不可能完全一致,导致上下直流母线上存在偏差,导致中点电位的偏移,一旦中点电位发生偏移以后精确控制不具备将中点电位拉回平衡点的能力,这是最主要原因。2)采样的延迟以及准确性,使得到的k值都滞后。因此,精确控制算法不但计算量大,而且在实际工程应用中得不到良好的体现。
3滞环控制+精确控制的综合控制策略
通过上节对2种中点电位控制方法的分析可以知道滞环控制粗,其鲁棒性强于精确中点控制方法,而精确中点控制精度高,一旦中点电压发生偏移以后就不具备将中点拉回平衡点的能力。基于此提出一种滞环控制+精确控制策略,如图5所示。
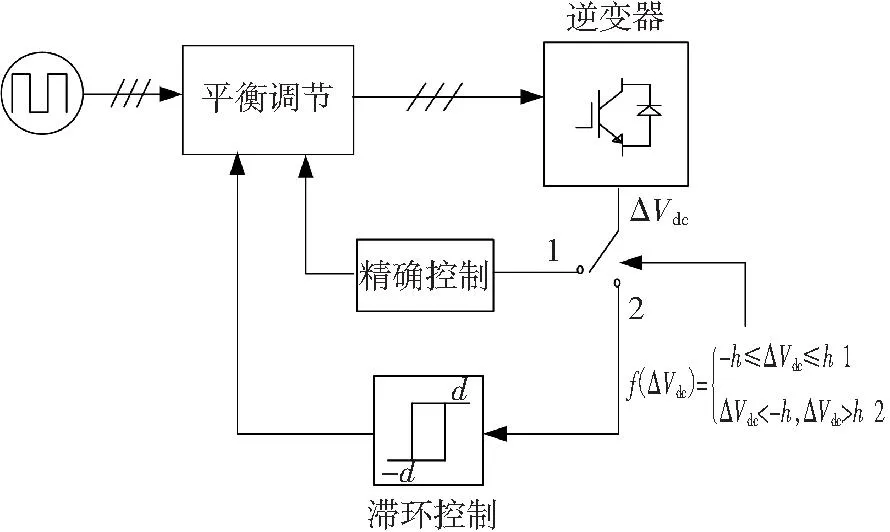
图5 滞环+精确控制策略
图中[-d,d]为滞环控制的环宽,h为滞环控制与精确控制的切换点,h与d值关系如图6所示。
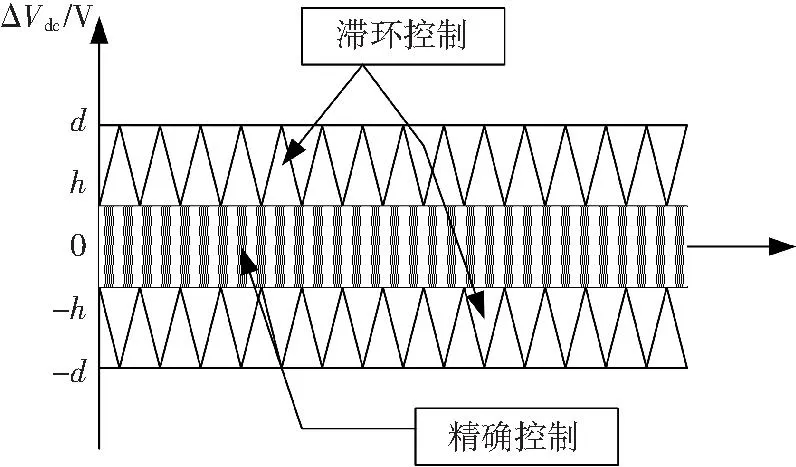
图6 滞环控制环宽d与切换点h
Fig. 6Ring widthdof hysteresis-band control
and switching pointh
由图可知,h取值不同有如下3种工况:
1)当h=0时,滞环控制+精确控制就等于是滞环控制单独作用。
2)当h=d或h>d时滞环控制+精确控制就等于是精确控制单独作用。
3)当h
滞环控制和精确控制方法的原理在上节已经做了详细的阐述,所以滞环控制+精确控制的综合控制策略的关键点在于h值和d值的选取。下面讨论h值和d值选取需要综合考虑的因素。
1)调制度M的影响:M的大小会影响中点电位平衡性,进一步影响h值和d值的选取。
2)中点电位的波动幅度:中点电位波动幅度太大,可适当减小h值和d值来抑制波动。
3)功率因数:功率因数比较小时,中点电位波动幅度变大,需要适当减小d值和h值。
4)开关损耗:开关损耗太大需要适当增大h值和d值,来减小加入中点平衡算法增加的开关次数以减小开关损耗。
5)控制器的处理速度影响:h的取值会受控制器的处理速度影响,h值太小,控制器处理速度如不能满足需求会导致计算的延迟和误差。不能起到较好的控制效果。
因此针对不同的工况,负载,功率等级,可以通过设定功能码,根据不同的工况选取不同的h值和d值来平衡中点电位。实验表明一般取5≤d<10,2≤h≤5时中点控制效果比较理想。
4仿真分析与实验验证
4.1 仿真研究
按照上述所讲述的方法进行设计,应用Matlab软件在SIMULINK编写程序,并进行仿真。
仿真参数如下:
比较两组的产后出血率、剖宫产率、巨大儿率、早产儿率以及低出生体重儿率。采用我院自行编制的护理质量满意调查表对患者的护理满意度进行评估,其内容主要包括以下五项:服务及时性(30 分)、服务态度(30 分)、管理规范性(15 分)、住院环境(15 分)以及护理人员的综合素质(10 分),总计共100分,评分值越高说明患者的临床分娩护理满意度越高。
输入线电压380 V,直流侧母线电压为538V,母线电容为两个700 V/470 μF的电容串联,负载为三相感应电机,电机参数为:Pn=0.75 kW、Un=380 V、P=2、Rs=8.84 Ω、Rr=5.91 Ω、Ls=Lr=28.5 mH、Lm=164.2 mH,载波频率fc=2 kHz,输出频率fo=50 Hz,调制度M=1。(注:中点电位波动最大时)
由图7加入中点控制前后仿真波形对比可见,加入中点电位控制算法后中点电位不平衡明显有所改善。滞环控制算法独立作用时其鲁棒性比较好,但是波动范围比较大,控制比较粗。精确控制算法单独作用时,波动范围比较小,精度比较高,但是一旦中点电位偏移后不具备将电压拉回平衡点的能力。而滞环控制+精确控制沿袭了滞环控制较好的鲁棒性又传承了精确控制精度高的优点。中点电位的偏差可以很好的控制在±2V左右。
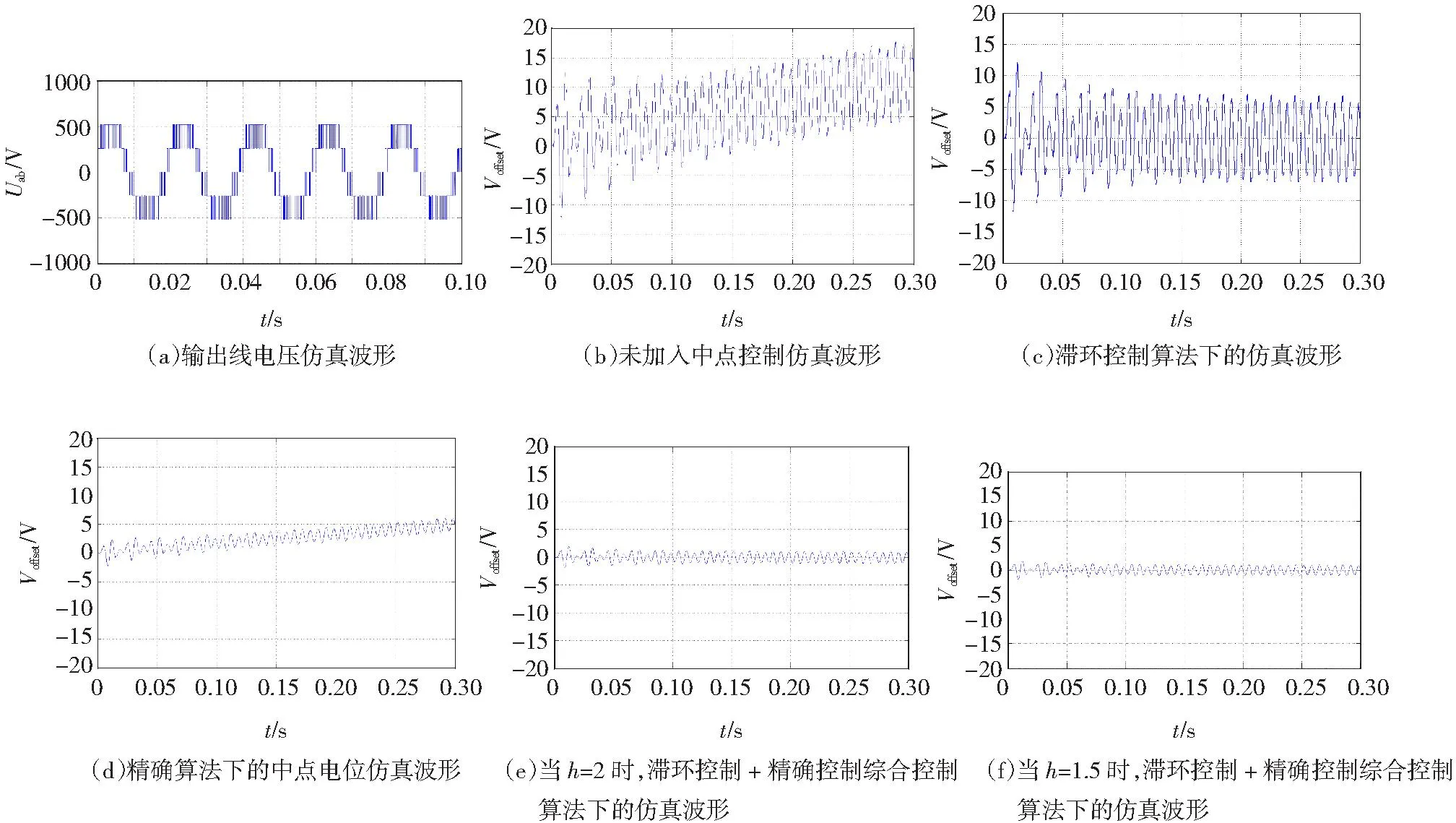
图7 加入中点控制前后仿真波形
4.2 实验结果
实验室内搭建了NPC三电平逆变器原型机,实验系统如图8所示,控制对象为750W三相异步电机,控制器采用的是TI公司的TMS28335数字信号处理器(digital signal processor,DSP),功率器件为Vincotech公司型号为FZ06NIA050SA的IGBT模块 控制方式为V/F,系统载波频率为fc=2kHz,输出频率fo=50 Hz,调制度M=1时,异步电机的参数与仿真时异步电机的参数。
图9为加入中点控制前后的实验波形,从实验波形可以看出,滞环控制+精确控制既有效的解决了滞环控制精度粗的问题较滞环控制单独作用下具有更小的波动,又解决了中点控制算电位偏移后不具备将中点电位拉回平衡点的能力,具有更优越的控制效果,提高了中点电位的鲁棒性。

图8 NPC型三电平逆变器实验平台系统
Fig. 8NPC three-level inverter experimental
platform system
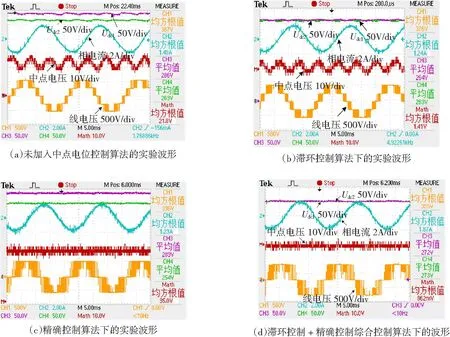
图9 加入算法前后实验波形
5结论
1)分析了三电平中点电位不平衡基理,提出一种滞环控制+精确控制的综合控制策略。
2)所采用的策略能使中点电位能得到很好的控制,鲁棒性强。
3)将滞环控制与精确控制较好的整合在一个算法中,通过功能码设定h值满足不同工况需求。
4)为验证本文分析方法的正确性,进行了样机试验,实验结果与理论分析结果一致。
参 考 文 献:
[1]胡存刚,王群京,李国丽.基于虚拟空间矢量的三电平NPC逆变器中点电压平衡控制方法[J] 电工技术学报,2009, 24(5):100-107.
HU Cungang, WANG Qunjing, LI Guoli. The control method of three-level NPC inverter neutral point voltage balance based on the virtual space vector[J]Transactions of China Electrotechnical Society, 2009, 24(5): 100-107.
[2]BUSQUETS-MONGE S, SOMAVILLA S, BORDONAU J, et al. Capacitor voltage balance for the neutral-point-clamped converter using the virtual space vector concept with optimized spectral performance [J]. IEEE Trancactions on Power Electronics,2007, 22(4):1128-1135.
[3]姚文熙,吕征宇,费万民.一种新的三电平中点电位滞环控制法[J] 中国电机工程学报,2005, 25(7):92-96.
YAO Wenjxi, LÜ Zhengyu, FEI Wanming, A new three-level neutral point potential hysteresis control method[J] Proceedings of the CSEE, 2005, 25(7):92-96.
[4]童鸣.三电平NPC逆变器中点电位波动的研究[D].合肥:合肥工业大学, 2009.
[5]宋文祥,陈国呈,武慧,等.一种具有中点电位平衡功能的三电平空间矢量调制方法及实现[J] 中国电机工程学报,2006,26(12):95-100.
SONG Wenxiang, CHEN Guocheng, WU Hui, et al. Anovel SVPWM strategy and its implementation considering neutral-point potential balancing for three-level NPC inverter[J]. Proceedings of the CSEE, 2006, 26 (12): 95-100.
[6]LEE Dongho, LEE S R, LEE F C. An analysis of midpoint balance for the netural-point-clamped three-level VSI [C]//PESC 98 Record, May 17-22, 1998, Fukuoka, Japan. 1998,1:193-199.
[7]金舜,钟彦儒,明正峰,等.一种控制中点电位并消除窄脉冲的三电平PWM方法[J].中国电机工程学报,2003,23(10):114-118.
JIN Shun,ZHONG Yanru,MING Zhengfeng,et al.A three-level PWM method of neutral-point balancing and narrow-pulse elimination[J].Proceedings of the CSEE,2002,23(10):114-118
[8]罗永吉,尹华杰,周艳青.三电平NPC逆变器中点电位平衡的软件算法[J]. 电气传动,2008,38(5):3-7.
LUO Yongji, YIN Huajie, ZHOU Yanqing, The software algorithms of three-level NPC inverter neutral-point potential balance[J]. Electric Drive, 2008,38(5):3-7.
(编辑:张诗阁)
Research on one hysteresis control+precise control strategy of three-level inverter for neutral-point potential balance
WANG Jian-yuan,LEI Guo-hui,ZHONG Yan-ru
(Department of Electrical Engineering, Xi’an University of Technology, Xi’an 710048, China)
Abstract:The unbalance of neutral-point potential is an inherent problem of three-level neutral point clamped (NPC) inverter, it is paid wide range attention in academic research and engineering practice. This NPC method is divided into two types: hardware and software method. The hardware method mainly depends on external circuit to adjust, in with Boost and Buck circuit are used to control the capacitor charge and discharge and implement the balance of neutral point voltage. This method increases the cost of whole inverter. The factors were analyzed which cause the unbalance of neutral-point voltage, and one hysteresis and precise control strategy of improving the robustness of neutral-point voltage was introduced. This control strategy combines hysteresis control with precise control,and a certain band width is set as the two different control methods switching condition. If the neutral-point voltage exceeds the band width, the hysteresis control strategy was employed,and the precise control strategy was employed vice verse. The method was validated through simulation and experiment. The results of simulation and experiment show that the method solve the hysteresis control problem of rough control, existing blind area and influencing by power factor, at the same time, make up for the ability which balance the neutral point when the neutral voltage is one-sided during adopting the precise control. This method is effective to control fluctuation and deviation of neutral point voltage and improve robustness of neutral point control.
Keywords:neutral-point voltage;unbalance; robustness; hysteresis control; precise control
通讯作者:王建渊
作者简介:王建渊(1973—),男,博士,讲师,研究方向为新型电力电子装置与三电平逆变器控制;
基金项目:陕西省协同创新基金(105-221421)
收稿日期:2013-06-06
中图分类号:TM 921
文献标志码:A
文章编号:1007-449X(2015)07-0066-07
DOI:10.15938/j.emc.2015.07.010