多UAV路径跟踪协同编队机动指令决策算法
2015-03-15杨宇龙王小平林秦颖狄方旭刘哲
杨宇龙, 王小平, 林秦颖, 狄方旭, 刘哲
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
多UAV路径跟踪协同编队机动指令决策算法
杨宇龙, 王小平, 林秦颖, 狄方旭, 刘哲
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
针对多UAV在空间路径跟踪下的协同编队控制问题,设计了一种机动指令决策算法。对单架UAV的路径跟踪引入视距导航算法并进行改进,得到航迹方位角和航迹倾斜角的参考指令;对于多UAV协同编队控制,应用图论知识得到空速大小的参考指令;依据参考指令,通过函数解析与数值编程相结合的方法计算出机动指令。仿真结果表明,该算法能够有效控制多UAV从任意初始状态进行预期的路径跟踪协同编队飞行。
多无人机; 路径跟踪; 协同编队; 机动指令
0 引言
多UAV的自主协同,以多UAV的路径跟踪协同编队控制技术为基础,而相应的机动指令决策算法更是其中必不可少的关键环节和重要技术。无人机应用广泛,主要执行复杂的、繁重/重复或具有一定危险性的任务。如果采用多UAV协同编队飞行,则能更好地提高无人机的执行效率[1]和完成任务的成功率[2]。
国内外对多无人机的协同编队控制已经开展了大量的研究。基于领航跟随法和行为分解法的思想,针对多无人机编队飞行控制算法的研究有很多,并且取得了不错的仿真效果[3-4]。在国内,文献[5]采用路径函数的方法解决了二阶多智能体沿多条正则曲线的编队控制问题。类似的思想被用于空间多飞行器的路径跟踪协同控制[6]。
视距导航算法由Fossen等[7]提出并广泛应用于欠驱动水面船舶的控制领域。文献[8]采用视距导航算法实现了多无人水下航行器的协同编队控制。
本文改进视距导航算法,引用图论知识得到无人机空速大小、航迹方位角和航迹倾斜角的参考指令;再通过函数解析和数值编程相结合的方法,计算出机动指令,据此设计路径跟踪协同编队控制器,从而实现空间路径跟踪下的多UAV协同编队控制。
1 无人机数学模型
多无人机编队机动的控制指令决策过程中,假设各无人机侧力为0(无人机机动过程中侧力很小),并且无人机机动过程中总是尽量使侧滑角为0,则简化后的无人机三自由度动态方程[9]为:
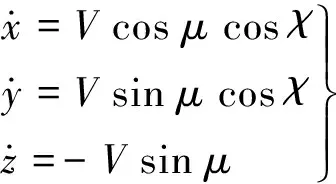
(1)
(2)
其中:

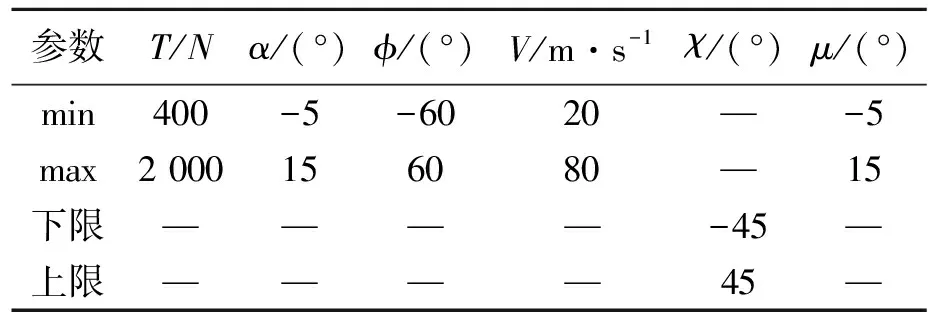
表1 无人机约束条件Table 1 The constraint of the UAV
2 多UAV路径跟踪协同编队控制器设计
2.1 路径跟踪控制器设计
如图1所示,将无人机对给定路径L的跟踪问题转变成无人机对给定路径上目标点D(xd,yd,zd)的跟踪问题。
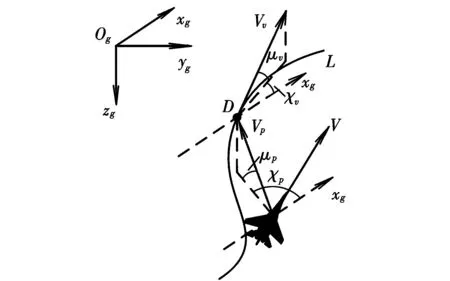
图1 无人机路径跟踪示意图Fig.1 Diagram of UAV path tracking
定义
(3)
则:
(4)
χp=
(5)
(6)
(7)
(8)
式中:χp和μp为无人机指向目标点的机动方向,使无人机机动到目标点上;χv和μv为目标点在给定路径上沿运动方向的切线方向,使无人机沿给定路径飞行。为实现良好的路径跟踪效果,采用式 (9)~式(12)综合考虑上述两个方向:
(9)
(10)
(11)
(12)


2.2 协同编队控制器设计
本文通过调节无人机的空速大小,使多无人机在给定路径上形成并保持给定的相对位置来完成协同编队。
假设V(t)∈(Vmin,Vmax),∀t≥t0,确定常数h>0满足:
Vdi(t)∈[Vmin+h,Vmax-h]
(i=1,2,…,n; ∀t≥t0)
(13)
取协同编队控制器的空速大小参考指令为:
Vci(t)=Vdi(t)-f(·) (i=1,2,…,n)
(14)
则:
(15)

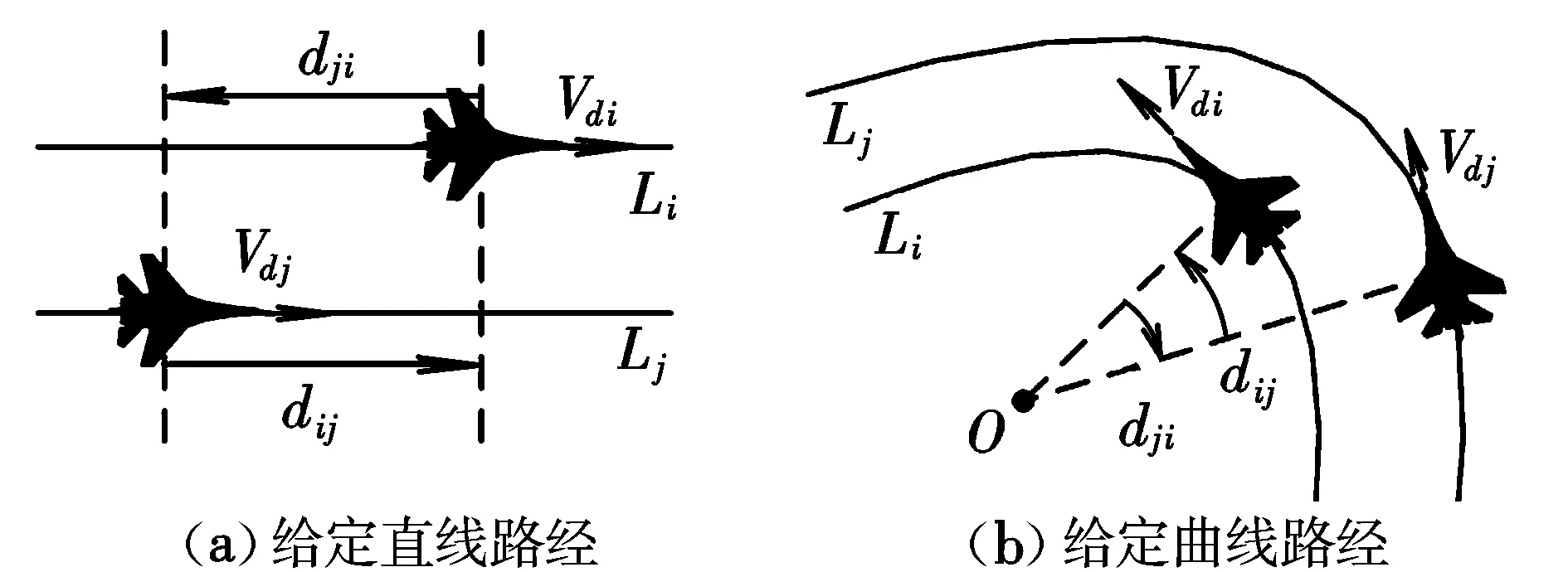
图2 编队队形示意图Fig.2 Schematic diagram of UAVs formation
2.3 无人机机动指令决策
(1)无人机空速大小V
(16)
将式(16)移项后结合式(2),可得:
(17)
整理式(17),可得:
(18)
(2)无人机航迹方位角χ
无人机航迹方位角χ的算法与空速大小V类似,可得:
(19)
整理式(19),可得:
Lsinφ+Tsinφsinα=
(20)
(3)无人机航迹倾斜角μ
无人机算航迹倾斜角μ的算法与空速大小V类似,可得:
(21)
整理式(21),可得:
Lcosφ+Tcosφsinα=
(22)
(4)解算无人机机动指令
①滚转角φ。将式(20)除以式(22),可得:

(23)
因此,无人机机动指令滚转角

(24)
②推力T和迎角α。将式(24)的值代入式(22)并移项,可得:
L+Tsinα=
(25)
将式(25)移项整理为:
g(T,α)=
(26)
将式(18)移项整理为:
h(T,α)=Tcosα-D-mgsinμ-
(27)
定义目标函数J(T,α)为:
J(T,α)=[g(T,α)]2+[h(T,α)]2
(28)
采用穷举法将推力T和迎角α分别在约束区间[400,2 000]和[-5,15]等分为400份,取401个样本点;每个周期内,将4012=160 801组(T,α)分别代入目标函数J(T,α),将最小目标函数值所对应的(T,α)min作为下一个周期的无人机机动指令。
3 仿真验证
Li(t)=
(k=0,1,…,N;i=1,2,3)
(29)
式中:R1=900 m,R2=950 m,R3=1 000 m;ω=Vd2/R2;采样时间ts=0.02 s。
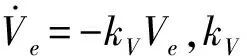
设置UAV的初始条件为:位置为p1=(300,-100,120) m,p2=(980,0,190) m,p3=(1 400,200,240) m;空速大小为V1(0)=28 m/s,V2(0)=40 m/s,V3(0)=70 m/s;航迹方位角为χi(0)=0°,航迹倾斜角为μi(0)=0°,推力Ti=629 N,迎角αi=3.2°,滚转角φi=0°,i=1,2,3。控制器增益kV=56.4,kχ=49.4,kμ=31.1,kv1=4.9,kp1=65.7,kv2=1.7,kp2=79.6;函数f(·)=40[arctan(·)]/π∈(-20,20)。仿真结果见图3~图6。
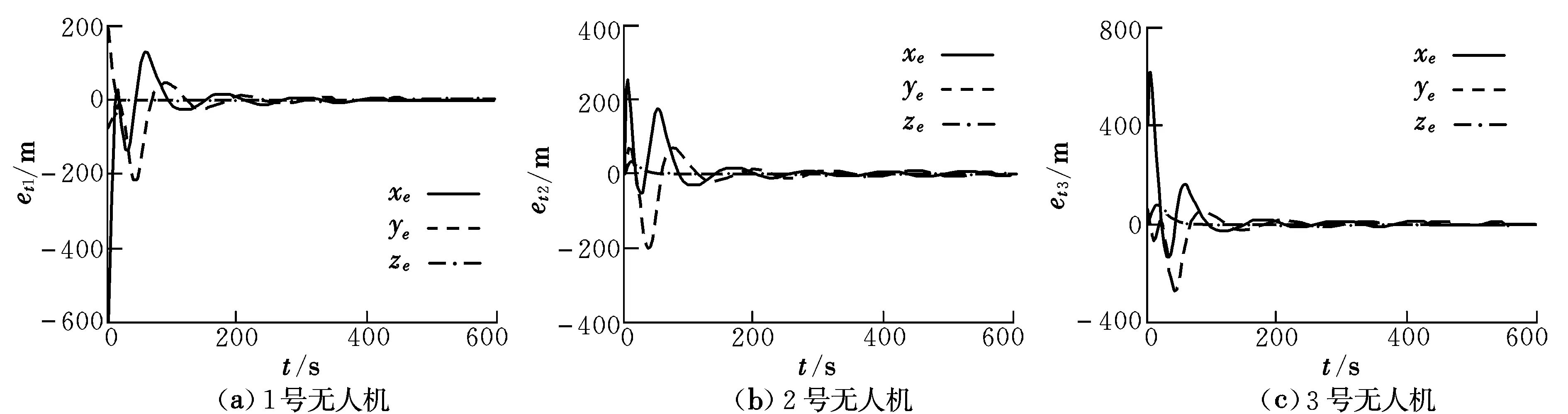
图3 et变化曲线Fig.3 Curves of the errors of UAVs tracking space-paths
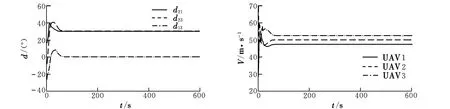
图4 无人机相互之间的夹角和空速变化曲线Fig.4 Curves of the angle between each 2 UAVs and the change of airspeed
图5 多无人机路径跟踪协同编队的三维效果图Fig.5 3D effect diagram of UAVs path tracking and coordinated formation
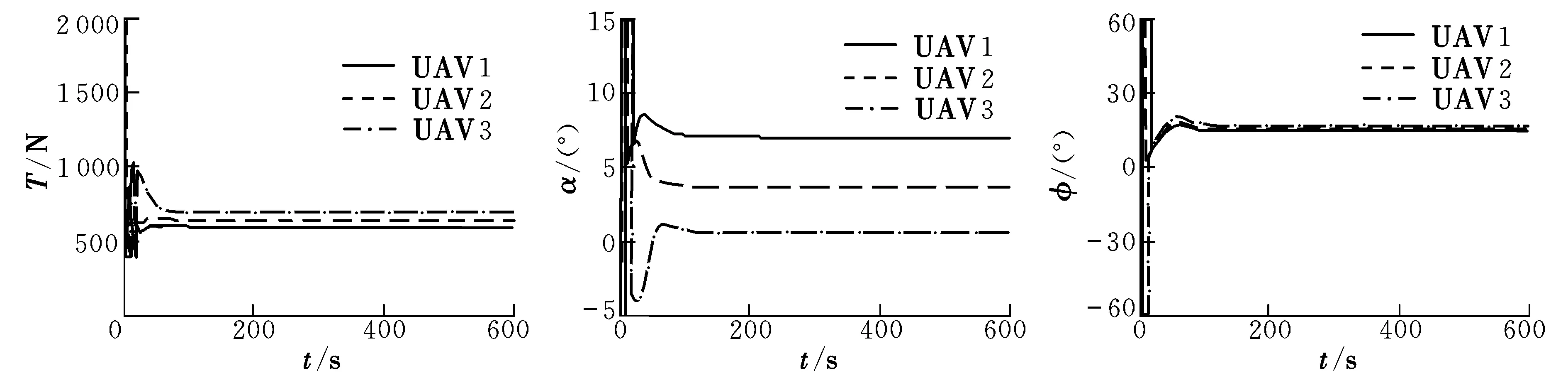
图6 UAV路径跟踪协同编队的机动指令Fig.6 Maneuvering commands for UAVs path tracking and coordinated formation
可以看出:3架UAV的路径跟踪误差最终收敛稳定在可接受的范围内; 3架UAV相互之间的夹角及2号UAV的空速大小最终收敛到给定值,形成并保持给定编队队形;本文算法能使3架UAV从任意初始位置跟踪上各自的期望路径,同时形成并保持期望编队队形;3架UAV路径跟踪协同编队的机动指令决策轨迹经过短暂振荡后迅速趋于稳定,说明该算法能够控制UAV快速稳定地达到期望效果。
4 结束语
本文基于行为分解法的思想,将多UAV的编队飞行控制问题解耦为路径跟踪和协同编队两个子问题。对于路径跟踪问题,构造了一组自适应路径跟踪距离误差的系数来改进视距导航算法,通过改进后的视距导航算法得到航迹方位角和航迹倾斜角参考指令。对于协同编队问题,在前者的基础上,通过调节无人机的空速大小实现多UAV间的协同编队,得到空速大小的参考指令。然后,依据参考指令,采用函数解析和数值编程相结合的方法,计算出机动指令决策轨迹。最后,通过MATLAB程序仿真验证了该算法的有效性。
[1] York G,Pack D J.Ground target detection using cooperative unmanned aerial systems[J].Journal of Lntelligent & Robotic Systems,2012,65(14):473-478.
[2] Giulietti F,Pollini L,Innocenti M.Autonomous formation flight[J].IEEE Control Systems Magazine,2000(12):566-572.
[3] Rakesh P R,Padhi R.Formation flying of UAVs with dynamic inversion based partial integrated guidance and control[R].AIAA-2011-6600, 2011.
[4] Chawla C,Padhi R.Neuro-adaptive augmented dyanmic inversion based PIGC design for reactive obstacle avoidance of UAVs[R].AIAA-2011-6642,2011.
[5] 陈杨杨,田玉平.多智能体沿多条给定路径编队运动的有向协同控制[J].自动化学报,2009,35(12):1541-1549.
[6] Chen Yangyang,Tian Yuping.Coordinated path tracking control for multiple aircrafts in three dimensional space[C]//Proceedings of the 29th Chinese Control Conference. Beijing,2010:4524-4529.
[7] Fossen T,Breivik M,Skjetne R.Line-of-sight path follo-wing of underactuated marine craft[C]//Proc.6th IFAC MCMC.Spain,2003:244-249.
[8] 边信黔,牟春晖,严浙平.多UUV沿多条给定路径运动的协调编队控制[J].哈尔滨工业大学学报,2013,45(1):106-111.
[9] 宋敏.多无人机编队飞行与编队重构控制方法研究[D].西安:空军工程大学,2011.
(编辑:李怡)
Maneuvering command control algorithm for multi-UAV path tracking and coordinated formation
YANG Yu-long, WANG Xiao-ping, LIN Qin-ying, DI Fang-xu, LIU Zhe
(Aeronautics and Astronautics Engineering College, AFEU, Xi’an 710038, China)
For the problems of multi-UAV both path tracking and coordinated formation, a coordinated control algorithm for maneuvering command was designed. For the single UAV path tracking, the reference commands for flight-path azimuth angle and bank angle were got by improving line of sight guidance algorithm. For the multi-UAV coordinated formation control, the reference commands for airspeed were got by applying graph theory. According to the reference commands, the coordinated control commands were calculated by analyzing and programming. Simulation results show that the algorithm can effectively control multi-UAV to perform the expected path tracking and coordinated formation from the any initial states.
multi-UAV; path tracking; coordinated formation; maneuvering command
2015-01-08;
2015-04-25;
时间:2015-06-24 15:03
航空科学基金资助(20145196023)
杨宇龙(1988-),男,湖北当阳人,硕士,主要从事多无人机协同编队飞行的自主控制技术研究。
V279; TP273.1
A
1002-0853(2015)05-0471-05
