高超声速飞行器再入容错制导技术综述
2015-03-15钱佳淞齐瑞云姜斌
钱佳淞, 齐瑞云, 姜斌
(南京航空航天大学 自动化学院, 江苏 南京 210016)
高超声速飞行器再入容错制导技术综述
钱佳淞, 齐瑞云, 姜斌
(南京航空航天大学 自动化学院, 江苏 南京 210016)
对高超声速飞行器研制过程中最为关键的技术之一——再入容错制导技术进行了综述。回顾了高超声速飞行器容错制导研究概况;针对高超声速飞行器产生执行器、传感器、结构等故障引起气动参数在内的系统各项参数发生变化,已有的再入制导轨迹已经不能满足制导要求的问题,进行再入容错制导方法研究,找到故障情况下最优再入轨迹;介绍了几种再入容错制导方法,并对未来技术的发展进行了展望。
高超声速飞行器; 容错制导; 故障
0 引言
近年来,随着人们对太空资源越来越多的开发和利用,对于能够快速平稳地完成任务的天地往返系统的需求日益迫切。研究表明,天地往返过程中最严峻的阶段即再入段,因此大气再入领域被视为广泛开展空间应用的关键,再入制导与控制问题成为航空航天领域的研究热点[1-2]。对于高超声速飞行器的再入段,需要在具有极大初始再入动能和势能条件下,将飞行器平稳安全地导引到既定的能量管理段(TEAM),同时再入过程中需要满足过载、动压和热流率处于允许范围内,这是高超声速飞行器再入段制导设计面临的主要挑战,也是其区别于其他飞行器的显著特征[3]。高超声速飞行器再入段具有跨声速、多阶段、非线性、苛刻约束以及严重不确定性等特点[4]。
再入制导技术是高超声速飞行器研制中的一项关键技术,国内外学者对再入制导技术已进行了大量的研究:文献[5-6]在预测校正算法设计中做了大量的工作,并通过X-33平台进行飞行测试;文献[7-8]在再入飞行器动力学建模、再入轨道及制导律设计方面做了大量的研究工作;文献[9-10]对飞行器制导与控制进行了整体设计,分别从轨迹设计、制导律设计、姿态控制器设计方面进行了研究。
再入段容错制导与容错控制是相互联系相互影响的。在容错控制方面,文献[11-13]针对高超声速飞行器再入姿态控制系统,在执行机构或者传感器发生卡死、增益损伤及随机漂移等常见故障的情况下,基于模糊控制、自适应控制、鲁棒控制和滑模控制等理论方法设计了多种故障诊断和容错控制方案,增强了姿控系统的安全性与可靠性。
再入容错制导技术是针对高超声速飞行器在再入过程中发生故障时,要求制导与控制系统具有高度的自主容错能力,以满足高超声速飞行器安全平稳抵达能量管理段的需要。因此对再入段容错制导方法的研究具有实际的应用价值,且对提高飞行器的稳定性与安全性具有重要意义。
1 高超声速飞行器容错制导研究概况
美国在高超声速飞行器研制上起步早、投入大,经过半个多世纪的发展,NASA已经先后研究出DC-XA,X-33,X-34,X-37,X-40,X-43等试验性空间飞机[1],以及哥伦比亚号、挑战者号、发现号等已经发射并成功收回的航天飞机。而对于新一代高超声速飞行器的研制,在安全性等关键技术方面提出了更高的要求,研究在发生各种失效故障、异常情况下,如何改变制导律或者轨迹重构,以提升高超声速飞行器的再入容错制导能力。本文介绍了部分关于再入容错制导与控制的研究项目。
1.1 AG&C计划
先进制导与控制(AG&C)[14-15]计划是由马歇尔太空飞行中心(MSFC)从1999年4月至2000年10月研制的一个项目,主要目的是针对美国国家航空航天局(NASA)长远目标研究制导与控制方法。NASA长远发展规划中对高超声速飞行器的安全性提出了更高的要求,AG&C方法必须对飞行过程中发生的故障及干扰等不确定因素具有适应能力及进行重构任务的容错能力。AG&C项目的大部分飞行测试在X-33飞行器上实施。
1.2 IAG&C计划
集成自适应制导与控制(IAG&C)[15]计划是在AG&C计划基础上进行了进一步的技术发展与飞行测试,由美国空军研究实验室(AFRL)牵头主持研究,选用波音公司的X-40A作为飞行测试平台。IAG&C项目考虑舵面卡死的故障类型,研发控制重构、制导重构、轨迹重塑算法,致力于研究再入系统的重构能力,并在飞行器坠落测试实验中进行算法验证。
2 故障类型及故障影响
2.1 故障类型
再入飞行系统可能发生的故障类型主要有以下几种:
(1)执行器故障。执行器故障即控制舵面故障,一旦舵面发生故障,将会引起飞控系统的各项参数发生变化,影响到飞行器的性能,最终使得其失去控制。舵面故障主要分为:卡死、饱和、松浮、控制效能损失[16]。
(2)传感器故障。传感器故障即变量的检测装置发生故障,导致实际测量值与真实值存在误差。传感器故障可以分为卡死、偏差失效和增益失效,其中偏差还可以分为恒偏差、漂移和精度损伤[11]。
(3)结构故障。结构故障即系统故障,主要由两种原因造成:一是系统参数发生变化;二是系统状态发生变化。高超声速飞行器的发动机及机身、机翼、尾翼和舵面等机体部分受到损伤,使得飞行器气动特性发生巨大的变化,飞控系统无法正常工作。实际飞行中结构故障大部分是因为飞行器表面疲劳开裂和腐蚀失效导致的。
2.2 故障影响
当高超声速飞行器发生故障后,将导致升阻力气动系数发生明显的变化,从而导致气动力矩发生偏差,使得再入制导轨迹偏离原来的标称轨道。因此,进行再入容错制导研究的关键就是对气动系数的变化模型进行辨识和建模,以及故障信息到制导环的传递。文献[15]针对飞行器X-40A根据检测到的气动数据给出了故障下升阻力系数的变化曲线,对其进行曲线拟合可以得到两者的关系模型,将故障下的气动系数传递给制导环进行再入容错制导。
3 再入容错制导技术概述
一旦高超声速飞行器发生故障,需要对再入过程设计容错方法。文献[13]介绍了正常情况下再入轨迹设计、制导律设计、控制律设计之间的关系,在故障情况下可以借鉴这个思路从制导环和姿态环进行容错方法研究,其中轨迹设计与制导设计在离线再入制导中分别考虑,而对于在线再入制导,轨迹生成与制导指令产生是同时进行的,这个过程直接在制导环进行考虑;文献[17]介绍了制导环与姿态环集成容错设计,其中姿态环内部进行容错控制设计以满足对制导环传递的指令进行跟踪,制导环完成正常的制导任务而不考虑故障。图1给出了两环结合进行容错制导与控制的结构框图。图中,再入容错控制(FTC)[18]技术是从姿态环考虑利用剩余健康舵面对故障损失的力矩进行补偿,使得飞行器恢复故障前的机动性能。由于剩余舵面提供的补偿有限,所以FTC的容错能力有限,只适用于小故障下的容错控制。当故障过大时其补偿作用不够,此时需要从制导环考虑拥有更大容错能力的容错制导技术。再入容错制导(FTG)[19]技术即改变再入制导任务目标,重新规划再入制导轨迹,提供更大的灵活性,适用于更大故障下的容错需求。
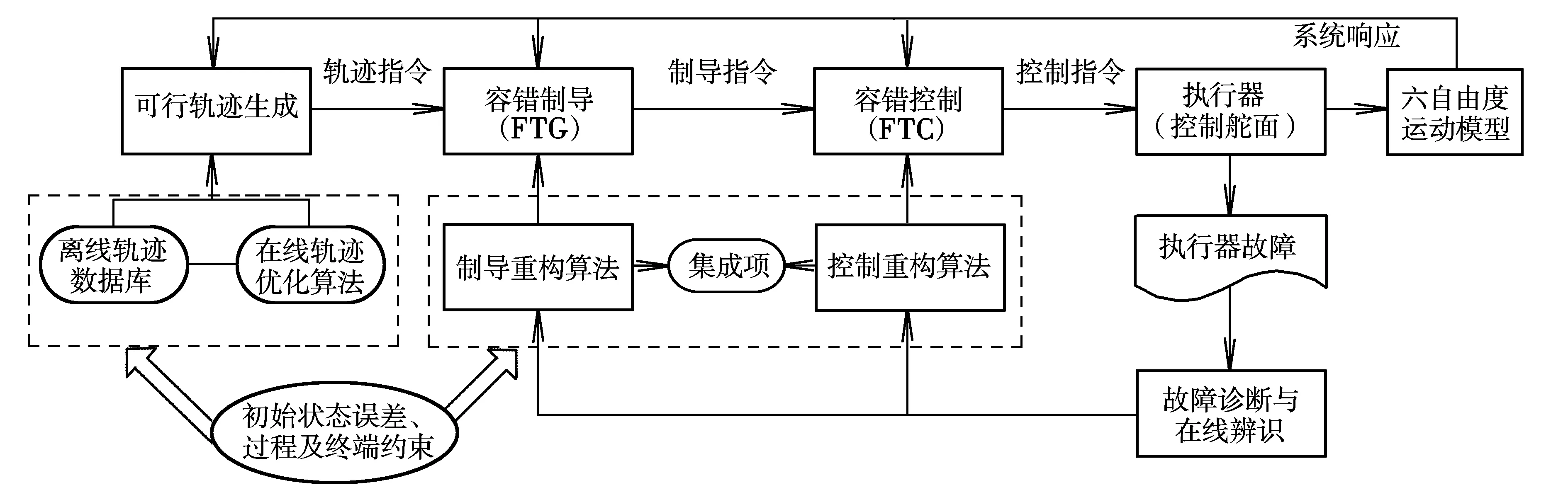
图1 集成制导与控制系统结构框架Fig.1 Framework of integrated guidance and control system
容错控制技术在过去几十年已经有了很大的发展,取得很多研究成果,而再入容错制导技术方面的研究很少,且对于高超声速飞行器的安全与稳定具有重大意义,所以再入容错制导研究具有实际的应用价值。
4 再入容错制导方法
4.1 集成重构制导与控制方法
集成自适应制导与控制方法是针对严重的执行器故障、气动不确定性以及阵风干扰等影响,结合内外环设计容错方法来进行补偿。文献[20-21]介绍了一种针对X-33飞行器开发出来的容错方法;文献[15]中的方法是为波音X-40A系统开发设计的,并且通过了飞行测试。这两种方法的结构体系相同,考虑了姿态环与制导环之间的联系,最终设计最优的重构轨迹。该系统的结构框架见文献[21]中图1。
该容错制导与控制系统由四个主要部分组成:
(1)故障辨识:文献[20]采用改进序列最小二乘法(MSLS)进行参数辨识,将辨识出的参数增益从姿态环引入到制导环进行自适应算法设计;文献[15]通过分析舵面控制分配的输入输出量,判断体轴是否饱和,将饱和项加入参考模型带宽的设计中,而将带宽引入到制导律可调参数的设计中。
(2)内环控制重构:控制重构的任务即针对内环系统保持姿态稳定且在故障情况下恢复机动性能,跟踪参考制导指令。
(3)外环制导重构:外环制导重构的任务即跟踪参考轨迹指令。文献[15]采用Back stepping算法设计制导律,根据内环的参考模型带宽的变化调节比例反馈增益,将增益引入至自适应制导律的设计中。
4.2 基于气动参数估计的最优轨迹重构方法
由于故障的影响,对于高超声速飞行器而言,气动参数的变化对飞行制导任务的顺利完成有很大的影响,研究故障后气动参数的变化,对进行容错制导控制具有非常重大的意义。文献[22]提出了故障情况下的气动模型,将控制舵面故障影响所产生的气动参数变化项引入到标准气动模型中,达到估计故障信息的作用,具体气动模型如下[22]:
(1)
式中:CLδ*(Ma,α,δ*)和CDδ*(Ma,α,δ*)分别为由控制舵面产生的带有故障信息的升力系数和阻力系数。采用线性规划及控制分配方法,求取在舵面力矩配平状态下的舵面力矩系数。这部分预测的故障信息用于基于直接伪谱法的最优轨迹重构算法中。
4.3 在线鲁棒轨迹生成方法
文献[23]介绍了一种针对舵面卡死故障下进行在线鲁棒轨迹生成的方法。首先,标称情况下,采用MP方法计算离线轨迹数据库;当飞行器发生故障,采用相邻最优控制算法(NOC)来实时生成相邻可行轨迹,使其从故障中恢复。当故障偏差足够小时,适用相邻轨迹存在定理(NFTET);而当故障偏差变大时,NFTET不再适用,将NFTET扩展为轨迹鲁棒性定理(TRT)。根据TRT原理,在原来制导律的基础上增加一项鲁棒项来补偿NFTET容错不足的部分,其中添加的鲁棒项是关于输入偏差项设计自适应律。根据输入偏差的大小变化调节参数,最终仿真表明鲁棒项的加入使得系统在大故障下拥有更好的鲁棒性。
面对相对低迷的复合肥需求以及激烈的市场竞争,许多经销商纷纷调整自身产品结构,以保证整体的利润空间。对此,刘真表示,许多经销商青睐有较大利润空间的特种新型肥料产品,但这些产品多应用于果蔬等经济作物,受需求量的影响,复合肥仍是大田作物区经销商的主要利润来源。
4.4 基于模型预测静态规划的鲁棒再入制导方法
模型预测静态规划技术(MPSP)在近年已经有了不少研究成果[24-25]。文献[25]将MPSP技术应用于再入制导飞行器的鲁棒性研究中,主要考虑模型中出现状态误差以及参数不确定等故障情况,再入制导过程中选定的控制变量为迎角和倾侧角,重构轨迹的制导过程就是计算迎角和倾侧角的过程。再入过程中迎角指令可以直接计算得到,而倾侧角指令的求取过程为先求取航向角指令,然后将得到的航向角指令用在动态逆环路中来求取倾侧角指令。鲁棒再入制导策略框图见文献[25]中图1。
鲁棒再入制导策略包括两部分:预测和校正。首先,根据控制变量上下限约束选定中间值为初始预测值U0,然后根据离散状态方程和输出方程迭代预测出下一时刻的状态量和输出量;然后判断输出量偏差值是否收敛为0。采用MPSP算法将偏差量传递到控制量的误差中,并更新出新的控制变量。由于MPSP算法迭代出的是航向角,所以需要将航向角值代入动态逆方程求出最终的控制量倾侧角。
4.5 内外环容错控制方法
文献[26]介绍了一种在发生执行器故障或者严重结构故障的情况,从外环制导环与内环姿态环进行容错控制的方法,采用期望状态与实际状态的偏差参与计算求取制导指令、姿态指令、舵面及油门偏转指令。与常见的两环集成制导与控制采用迎角、倾侧角及侧滑角作为制导控制变量不同,该方法采用轴加速度作为制导指令,分为三步:
(1)首先外环根据给定的航路点、期望高度和期望速度计算轴加速度,由速度制导、垂直制导、横向制导分别求取三个方向上的加速度指令,其中axG指令的求解表达式为:
(2)
式中:vmod为故障引起的修正项,具体表达式见文献[26]。
(2)将计算得到的加速度指令送入内环,根据期望状态与实际状态偏差及耦合各轴加速度指令分别计算出滚转角、偏航角和俯仰角。
(3)最后根据滚转角、偏航角和俯仰角期望与实际偏差,由相应的控制律分别计算出舵面偏转量,采用比例积分控制律求解油门开度。
5 结束语
再入容错制导技术针对飞行器遇到各种故障而临时改变任务的情况,着眼于提高飞行器在线重规划容错能力,对未来飞行器可靠性发展具有重要意义。虽然近年来该领域已经取得了一些研究成果,但仍存在下面一些关键技术问题需要未来作进一步的研究:
(1) 故障影响的系统性分析
目前已有的关于故障对高超声速飞行器性能的影响大都是定性的描述,或者是针对具体飞行器的飞行测试数据进行分析的结果,而不存在系统性的研究方法。需要进一步研究不同故障对飞行器气动参数定量的影响。
(2) 故障诊断与容错制导集成设计
目前故障诊断与容错控制技术方面的研究很多,而将故障诊断与容错制导技术相结合进行研究的学者很少,考虑故障诊断对于容错研究的完整性及将来实际应用阶段是必不可少的一部分。
(3) 制导系统的鲁棒性与自适应性研究
目前鲁棒控制方法和自适应控制方法在再入制导中的应用还不成熟,其代表了新型高超声速飞行器研究的一个方向,需要进一步的研究。
(4) 制导控制一体化技术研究
重构算法的设计需要体现制导与控制之间的耦合关系。目前NASA正在研究这一技术,该技术未来将成为提高飞行器容错能力的热门研究方向。
[1] 汤一华,余梦伦,杨勇,等.第二代可重复使用运载器及其再入制导技术[J].导弹与航天运载技术,2010 (1):26-31.
[2] 王威.高超声速飞行器滑翔段制导方法研究[D].哈尔滨:哈尔滨工业大学,2010.
[3] 张曼.可重复使用运载器预测校正再入制导研究[D].哈尔滨:哈尔滨工业大学,2013.
[4] 雍恩米.高超声速滑翔式再入飞行器轨迹优化与制导方法研究[D].长沙:国防科学技术大学,2008.
[5] Xue S,Lu P.Constrained predictor-corrector entry guidance[J].Journal of Guidance,Control,and Dynamics,2010,33(4):1273-1281.
[6] Lu P.Predictor-corrector entry guidance for low-lifting vehicles[J].Journal of Guidance,Control,and Dynamics,2008,31(4):1067-1075.
[7] 赵汉元.飞行器再入动力学和制导[M].长沙:国防科技大学出版社,1997:1-167.
[8] 赵汉元.航天器再入制导方法综述[J].航天控制,1994,12(1):26-33.
[9] Tian B,Fan W,Zong Q,et al.Nonlinear robust control for reusable launch vehicles in reentry phase based on time-varying high order sliding mode[J].Journal of the Franklin Institute,2013,350(7): 1787-1807.
[10] 宗群,田柘苓,窦立谦.基于 Gauss 伪谱法的临近空间飞行器上升段轨迹优化[J].宇航学报,2010,31(7):1775-1781.
[11] 姜斌,赵静,齐瑞云,等.近空间飞行器故障诊断与容错控制的研究进展[J].南京航空航天大学学报,2012,44(5):603-610.
[12] 许域菲,姜斌,齐瑞云,等.基于模糊T-S自适应观测器的近空间飞行器故障诊断与容错控制[J].东南大学学报:自然科学版,2009,39(S1):189-194.
[13] Lv X,Jiang B,Qi R,et al.Survey on nonlinear reconfigurable flight control[J].Journal of Systems Engineering and Electronics,2013,24(6):971-983.
[14] Hanson J.Advanced guidance and control project for reusable launch vehicles[R].AIAA-2000-3957,2000.
[15] Schierman J D,Ward D G,Hull J R,et al.Integrated adaptive guidance and control for re-entry vehicles with flight test results[J].Journal of Guidance,Control,and Dynamics,2004,27(6):975-988.
[16] 姜斌,杨浩.飞控系统主动容错控制技术综述[J].系统工程与电子技术,2007,29(12):2106-2110.
[17] Qian J,Qi R,Jiang B.Fault-tolerant guidance and control design for reentry hypersonic flight vehicles based on control-allocation approach[C]//Guidance,Navigation and Control Conference (CGNCC),2014 Chinese.IEEE,2014:1624-1629.
[18] Zhang Y,Jiang J.Bibliographical review on reconfigurable fault-tolerant control systems[J].Annual Reviews in Control,2008,32(2):229-252.
[19] Zolghadri A.Advanced model-based FDIR techniques for aerospace systems:today challenges and opportunities[J].Progress in Aerospace Sciences,2012,53:18-29.
[20] Schierman J D,Ward D G,Monaco J F.A reconfigurable guidance approach for reusable launch vehicles[R].AIAA-2001-4429,2001.
[21] Schierman J D,Hull J R,Ward D G.Adaptive guidance with trajectory reshaping for reusable launch vehicles[R].AIAA-2002-4458,2002.
[22] Oppenheimer M W,Doman D B,Bolender M A.A method for estimating control failure effects for aerodynamic vehicle trajectory retargeting[R].AIAA-2004-5169,2004.
[23] Jiang Z.On-line approach/landing trajectory generation with input deviation bound uncertainty for reusable launch vehicles[C]//2007 46th IEEE Conference on Decision and Control.IEEE,2007:4912-4917.
[24] Padhi R,Kothari M.Model predictive static programming:a computationally efficient technique for suboptimal control design[J].International Journal of Innovative Computing Information and Control,2009,5(2):399-411.
[25] Halbe O,Raja R G,Padhi R.Robust reentry guidance of a reusable launch vehicle using model predictive static programming[J].Journal of Guidance,Control,and Dynamics,2014,37(1):134-148.
[26] Chowdhary G,Johnson E N,Chandramohan R,et al.Guidance and control of airplanes under actuator failures and severe structural damage[J].Journal of Guidance,Control,and Dynamics,2013,36(4):1093-1104.
(编辑:李怡)
Review of reentry fault-tolerant guidance technology on hypersonic vehicles
QIAN Jia-song, QI Rui-yun, JIANG Bin
(College of Automation Engineering, NUAA, Nanjing 210016, China)
This paper reviews one of the most critical technologies in the development process of hypersonic vehicles—the technology of fault-tolerant guidance for hypersonic reentry vehicle. The research situation of the hypersonic aircraft fault tolerant guidance was retrospected. For the problem of the hypersonic vehicle failures such as aircraft actuators, sensors and structure caused the change of system parameters including aerodynamic parameter, the original reentry trajectory could not meet the requirements of guidance, the reentry fault-tolerant guidance methods to find the optimal reentry trajectory under fault conditions were studied. The paper presents some reentry fault-tolerant guidance methods and prospects the future development of the technology.
hypersonic vehicle; fault-tolerant guidance; failure
2014-12-11;
2015-04-01;
时间:2015-06-24 15:03
国家自然科学基金资助(61374116,61273171);南京航空航天大学研究生创新基地(实验室)开放基金资助(kfjj201421);中央高校基本科研业务费专项资金资助
钱佳淞(1990-),男,硕士研究生,主要研究方向为再入容错制导与控制; 齐瑞云(1979-),女,教授,博士,主要研究方向为容错制导与轨迹优化、故障诊断与容错控制。
V448.2
A
1002-0853(2015)05-0390-05
