飞翼运输机重心前后限和纵向飞行品质研究
2015-03-15吕新波盛慧齐万涛
吕新波, 盛慧, 齐万涛
(中航工业第一飞机设计研究院 总体气动设计研究所, 陕西 西安 710089)
飞翼运输机重心前后限和纵向飞行品质研究
吕新波, 盛慧, 齐万涛
(中航工业第一飞机设计研究院 总体气动设计研究所, 陕西 西安 710089)
为了提高飞翼运输机纵向飞行品质,首先研究了该类飞机纵向气动性和操纵特点,并给出了确定其重心前后限的设计方法;然后给出了飞翼运输机纵向操纵能力的计算方法并进行了计算分析;最后,针对飞翼运输机纵向本体稳定性不满足要求的问题,研究了提高飞翼运输机纵向飞行品质的有效方法。研究结果表明,飞翼运输机特有的操纵特性可提高其升阻比,通过合理设计重心前后限以及增稳系统控制律可以保证飞翼运输机具有满意的飞行品质。
飞翼; 重心前后限; 纵向静稳定性; 短周期模态; 控制律
0 引言
为了降低成本、提高竞争力,各航空公司将低油耗、高经济性作为下一代运输机的主要要求。因具有优良的升阻特性(最大升阻比为20~25),飞翼运输机作为有潜力的创新型飞机越来越受到重视。飞翼运输机是一种既没有平尾,也没有垂尾的非常规布局飞机[1],是综合了气动、推力及飞控一体化的先进飞机。作为未来运输机,飞翼运输机令人耳目一新,翼身融合体更多地顾及了空气动力特性的优化和有效载荷的增加。国外对飞翼运输机气动布局进行了详细研究[2],将其作为下一代新型气动布局飞机首选方案之一[3]。文献[4]将飞翼气动布局应用到民用运输机的设计中,重点对飞翼运输机的气动布局进行了研究。因为没有平尾和垂尾,所以飞翼运输机的设计难点主要体现在操纵性和稳定性方面。由于飞翼布局导致的气动、质量特性以及特殊操纵面的显著特点,飞翼运输机设计思路和方法有很多独特之处。
本文重点研究了飞翼运输机重心前后限的设计方法以及纵向操纵性、稳定性设计方法,同时给出了确定飞翼运输机纵向最小静稳定裕度的方法。
1 纵向气动和操纵特点
本文研究的飞翼运输机如图1所示。
图1 飞翼运输机外形图Fig.1 View of flying wing transport
飞翼布局与常规布局最主要的区别在于其取消了水平尾翼和垂直尾翼。飞翼布局俯仰操纵由安装于机翼后缘处的两对升降副翼来执行,且当两对升降副翼差动偏转时可以进行滚转操纵。飞翼运输机的操纵性和稳定性具有以下特点:
(1)飞翼运输机俯仰操纵效率很低,约为常规布局飞机的1/7~1/5。主要原因为执行俯仰操纵的升降副翼离重心很近,操纵力臂很小;同时升降副翼还要进行滚转操纵,存在操纵权限的分配问题;
(2)要考虑飞翼运输机各舵面组合操纵的影响,使用升降副翼产生的俯仰操纵效率不足时,可以考虑其他操纵面产生的附加俯仰操纵效率,如阻力方向舵产生的俯仰操纵能力;
(3)由于俯仰操纵效率低,飞翼运输机重心范围尽量小,且静稳定裕度不宜大;
(4)飞翼运输机俯仰阻尼导数约为常规布局飞机的1/12~1/10,会降低飞机短周期阻尼比,但考虑到飞机的静稳定裕度较小,因此飞翼运输机短周期阻尼比通常不会太低;
(5)飞翼运输机俯仰轴转动惯量约为常规布局飞机的1/4~1/3,该特点对提高短周期频率和操纵期望参数是有利的。
2 重心前后限确定
飞机重心后限由飞机本体最小纵向静稳定裕度来确定。不同资料对纵向最小静稳定裕度提出了不同的定量要求,采用非电传飞控系统的运输类飞机的纵向静稳定裕度的绝对值不小于10%MAC~12%MAC[5],典型的运输机在后重心位置上有5%MAC~10%MAC的纵向正静裕量[6]。通常非电传飞控系统大飞机的最小纵向静稳定裕度大一些,而电传飞控系统大飞机的最小纵向静稳定裕度可以减小一些(进行了放宽静稳定性)。最小纵向静稳定性与平均气动弦长相关,考虑到飞翼运输机的平均气动弦长是常规布局飞机的1.5~2倍,因此常规布局的最小纵向静稳定裕度无法用于飞翼运输机。
飞翼运输机本体最小纵向静稳定裕度的确定与飞机总体要求及飞行品质有关。虽然飞翼运输机采用电传操纵,但可靠性及安全性要求飞翼运输机为纵向静稳定的。考虑到飞翼运输机俯仰操纵力臂短导致俯仰操纵效率很低,以及飞机重心有一定的范围;因此飞翼运输机最小纵向静稳定裕度不宜过大,飞翼运输机本体应该是弱静稳定的,但最小纵向静稳定裕度需要根据飞行品质的计算来确定。
虽然飞行品质规范GJB2874-97对最小纵向静稳定裕度没有要求,但飞行品质中的短周期反应以及机动飞行中的操纵感觉等要求,已经潜在地对最小纵向静稳定裕度进行了要求。研究认为,纵向飞行品质指标为等级2所对应的静稳定裕度作为本体最小纵向静稳定裕度适合于飞翼运输机。因此通过飞行品质指标的计算最终确定了飞翼运输机本体最小纵向静稳定裕度。图2给出了给定纵向静稳定性的短周期操纵期望参数计算结果。最终确定出飞翼运输机本体最小纵向静稳定裕度为2%MAC~3%MAC时,纵向飞行品质可以满足等级2的要求,通过电传飞控可以进一步提高飞行品质。
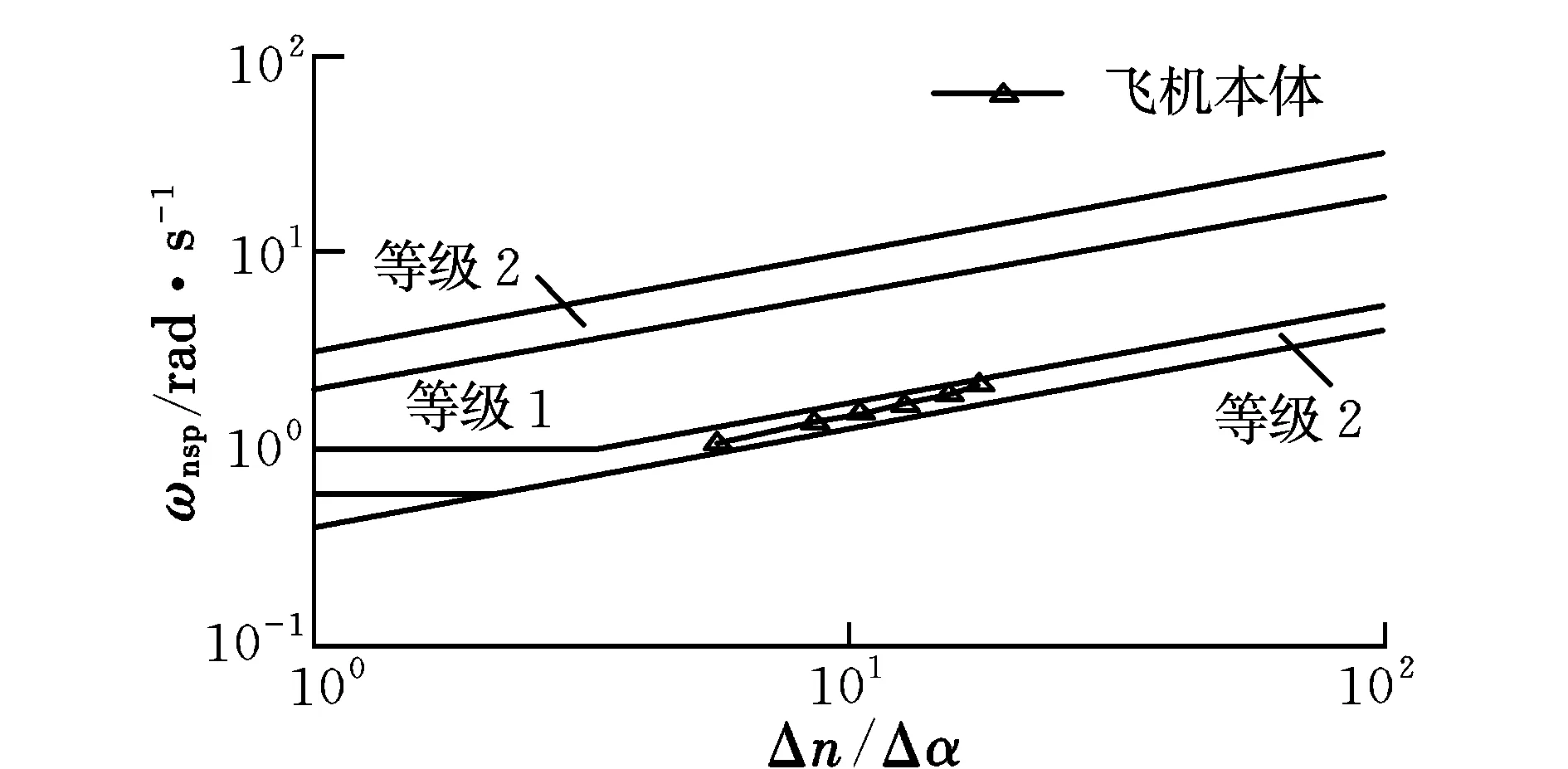
图2 短周期频率和操纵期望参数计算结果Fig.2 Results of short period frequency and control anticipant parameters
根据最小纵向静稳定裕度以及气动焦点,通过式(1)可求出飞翼运输机重心后限:
(1)

通常飞机随着燃油变化以及装载变化重心有一定的变化范围,在重心后限确定之后,根据重心的范围,即可确定重心前限。考虑到飞翼运输机俯仰操纵效率不高,因此重心前限不能太靠前,也就是说同时要求最小纵向静稳定裕度不宜过大以及重心范围不宜过大,设计过程中通过耗油顺序优化以及装载的合理布置确保一个较小的重心范围,如5%MAC~6%MAC重心移动范围。此时,确定出的重心前限对俯仰操纵能力提出了要求,也就是说俯仰操纵效能必须要保证重心前限时飞机的操纵性满足要求。
3 纵向操纵能力
对于常规布局,通常俯仰操纵面位于尾翼后缘,其俯仰力臂较大,在设计完翼身组合体后进行尾翼设计,确保操稳特性满足要求。飞翼布局与常规布局的最大差异在于取消了尾翼(包含平尾和垂尾),因此飞翼布局的俯仰操纵面只能布置于机翼后缘,目前采用较多的为升降副翼。升降副翼不但具有俯仰操纵功能,而且还具有滚转操纵能力。
操纵面最基本的作用就是提供满足规范要求的操纵效能。方案阶段,可以根据以下针对纵向操纵性的要求来设计飞翼运输机舵面操纵效能。
(1)起飞抬前轮要求
起飞抬前轮是一项必须检查的纵向操纵效能设计状态。规范要求在0.9倍最小离地速度时,纵向操纵效能应能使飞机抬起前轮,达到起飞离地姿态。飞翼运输机起飞抬前轮阶段升力小,重点要克服地面支反力及摩擦力引起的低头力矩,对于弱稳定的飞翼运输机,在重心前限平衡所需舵面负向偏量较大,因此该状态点为计算俯仰操纵能力的临界条件之一。
(2)
式中:q为动压;T为发动机推力;x为飞机重心至主轮轴的水平距离;f为主轮滚动摩擦系数;yg为飞机重心至地面的铅垂距离;yp为发动机推力线偏离飞机重心的铅垂距离;SW为机翼参考面积;Cm为俯仰力矩系数;δe为升降副翼偏角。
对本文飞翼运输机,在考虑一定阻力舵产生的俯仰力矩条件下,在重心前限起飞抬前轮所需的升降副翼偏角为-14°,满足起飞抬前轮要求。计算分析发现,重心和主起落架距离对飞机起飞抬前轮影响非常大,重心和主起落架距离不宜过大。由于飞翼布局大飞机俯仰操纵效率低,因此必须确定合适的重心和主起落架距离,才能满足起飞抬前轮要求。
(2)着陆接地要求
规范要求飞机着陆下滑过程中,接近地面时纵向操纵效能应足以使飞机达到并保持接地时的姿态。对于弱稳定的飞翼运输机,在重心前限着陆接地时平衡所需舵面负向偏量较大,该状态点为计算俯仰操纵能力的临界条件之一。
将式(3)~式(5)平衡计算公式联合迭代求解,可得飞机着陆接地时所需的纵向操纵面偏角:
qSWCL(α,δe)=G-Tsinα
(3)
qSWCD(CL,δe)=Tcosα
(4)
qSWcACm(CL,δe)=Tyg
(5)
计算得到本文飞翼运输机重心前限着陆接地所需的升降副翼偏角为-11°,满足着陆接地的要求。
调查结果显示,有待进一步提高的知识包括跨学科知识、专业基础知识、研究方法论知识、专业前沿知识等。分别有42.5%和22.5%的学生认为要提高专业前沿知识和研究方法论知识;另有17.5%和12.5%学生认为应该提高跨学科知识和专业基础知识。其中,大部分学生把专业前沿知识看做最需要提高的知识。在课程设置时,如果没有按照学生的知识结构合理整合课程知识内容,将会降低应有的知识覆盖面。在能力提升方面,大多数学生认为创新能力和解决问题能力有待提高。从目前高校对学生培养情况看,这两种能力的确也是当今大学生最欠缺的。
(3)机动能力要求
纵向操纵面最重要的设计要求即要满足飞行包线中的机动过载。规范中要求在使用飞行包线内,单独使用俯仰操纵时具有规定的法向过载范围。因此在计算中首先求得纵向平衡所需舵面偏角,然后在此基础上增加机动所需舵面偏角,即为保证纵向机动能力的舵面偏角。飞机在重心前限机动速度机动时舵面偏角需求为临界值,大于机动速度后可以对舵面进行限偏。根据式(6)叠加配平时的纵向操纵面偏角,即可求出最大过载对应的舵面偏角:
(6)
式中:Cmδe为升降副翼俯仰操纵效率;Cmq为俯仰力矩系数对俯仰角速度的导数;μ为飞机的相对密度。
计算得到本文飞翼运输机重心前限机动速度达到最大过载所需的升降副翼偏角为-8°,满足机动能力要求。
4 纵向稳定性及控制律设计
飞翼运输机的纵向静稳定性较小,短周期频率和操纵期望参数指标不满足图2等级1的要求。飞翼运输机纵向稳定性通过纵向操纵面结合自动增稳系统获得,这样纵向操纵面同时要实现纵向稳定性要求。单独俯仰速率反馈即阻尼器可以提高飞机短周期阻尼比,但对短周期频率改变不大;单独迎角反馈提高了短周期频率,但降低了短周期阻尼比。因此通常同时使用俯仰速率反馈和迎角反馈(增稳系统)来提高飞机的短周期特性,进行控制律设计。
(1)根据纵向短周期模态特性简化公式:
(7)
Cmq=Cmqbenti+KqCmδe
(8)

将式(8)带入式(7)中可得:
(9)
根据式(9)即可求得增益Kq。
(2)根据纵向短周期模态特性简化公式:
(10)
Cmq=Cmα benti+KαCmδe
(11)
由于式(10)中第二部分相对第一部分为小量,忽略后,将式(11)带入式(10)可得:
(12)
根据式(12)即可求得增益Kα。
图3给出了飞翼运输机纵向增稳系统框图。在巡航高度,当增益Kq=[0.21,0.18,0.17,0.16,0.15,0.13],Kα=[0.45,0.43,0.40,0.37,0.35,0.32]时的操纵期望参数、短周期频率以及短周期阻尼比均能满足等级1的要求。图4和图5给出了飞翼运输机本体以及增加纵向增稳系统后的短周期模态特性。可以看出,增稳系统可以改善飞机短周期模态特性,使飞机动稳定性满足要求。
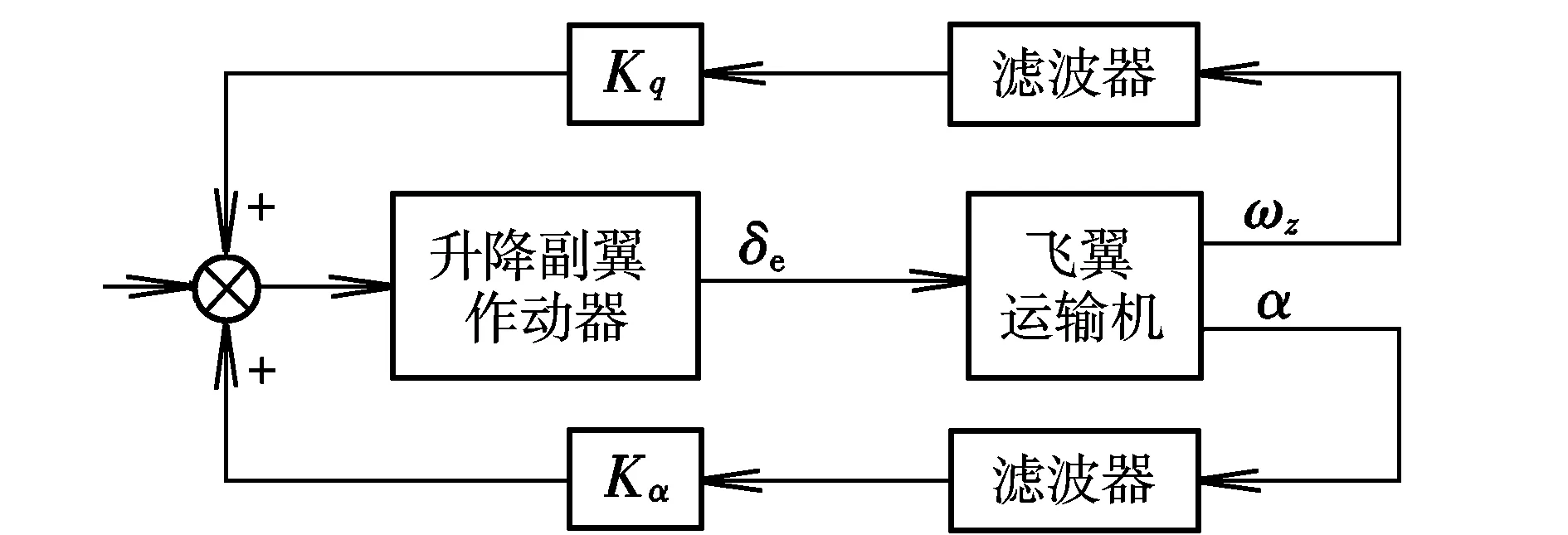
图3 纵向增稳系统框图Fig.3 Chart of longitudinal augmentation system
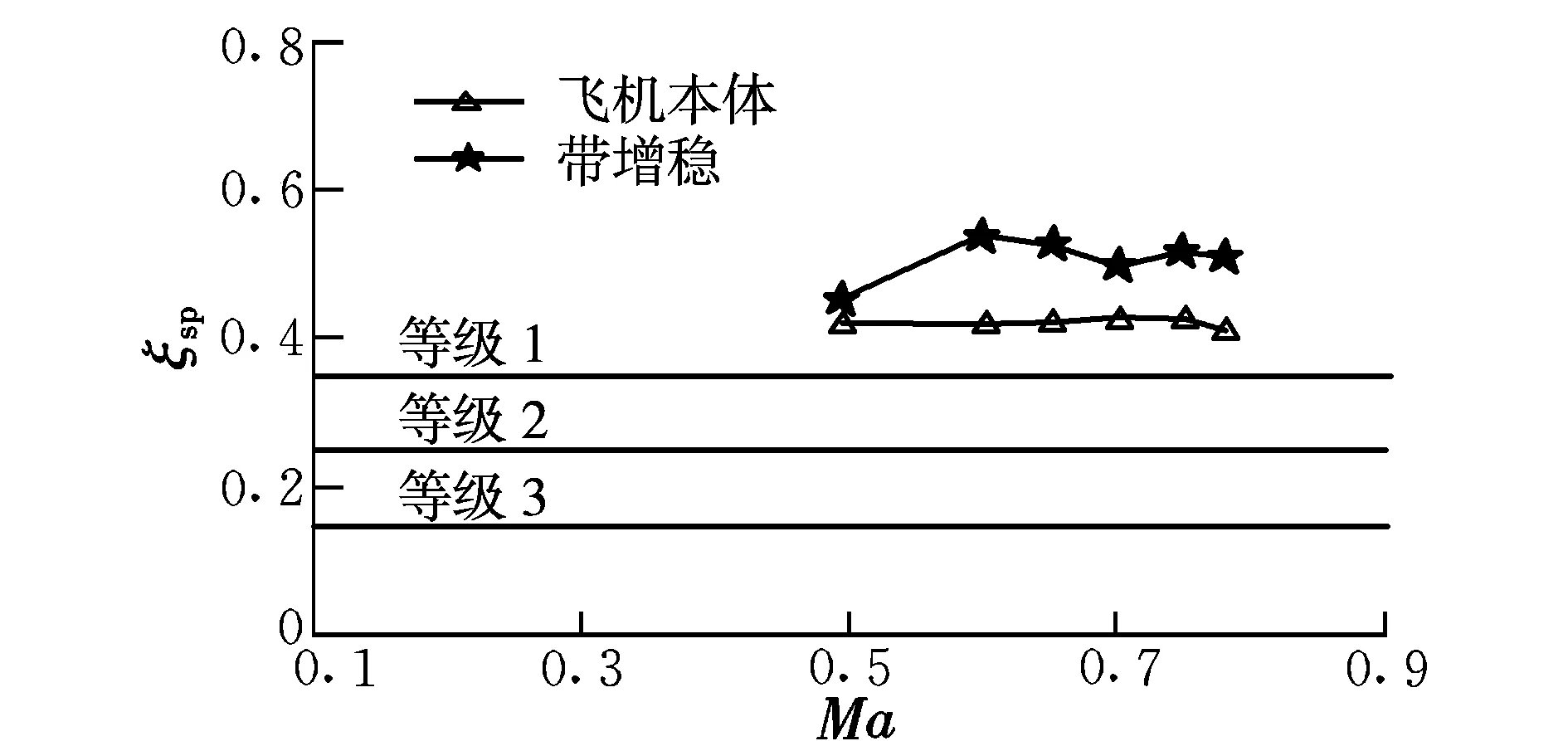
图4 飞翼运输机短周期阻尼比对比图Fig.4 Compare figure of short period damping ratio of flying wing transport
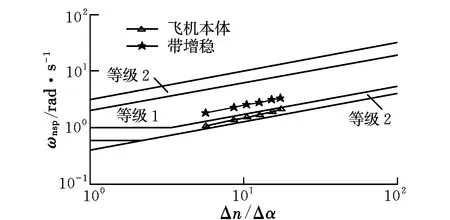
图5 飞翼运输机短周期频率操纵期望参数对比图Fig.5 Compare figure of short period frequency and control anticipant parameter of flying wing transport
5 结束语
本文给出了飞翼运输机重心前后限的设计方法以及纵向操纵能力的计算方法,同时研究了提高飞翼运输机纵向飞行品质的有效方法。该方法可以确保飞翼运输机具有满意的纵向飞行品质,适用于工程中飞机方案设计和应用。
[1] 林一平.崇尚简洁高效的飞翼运输机[J].交通和运输,2010(3):29-30.
[2] Liebeck R H.Design of the blend-wing-body subsonic transport [R].Journal of Aircraft, 2004,41(1):10-25.
[3] Mialon B,Fol T,Bonnaud C.Aerodynamic optimization of subsonic flying wing configuration [R].AIAA-2002-2931,2002.
[4] 杨宇飞.飞翼运输机气动布局设计[D].西安:西北工业大学,2007.
[5] 比施根斯 Γ C.干线飞机空气动力学和飞行力学[M].孙荣科,等译.北京:航空工业出版社,1996:236-237.
[6] 雷曼尔D P.现代飞机设计[M].北京:国防工业出版社,1992:305-306.
(编辑:李怡)
Center gravity limits and longitudinal flying qualities of flying wing transport
LYU Xin-bo, SHENG Hui, QI Wan-tao
(General Configuration and Aerodynamics Design Institute, AVIC the First Aircraft Institute, Xi’an 710089, China)
For increasing the longitudinal flying qualities of the flying wing transport, the aerodynamics and control characteristics were researched firstly. The design method to ascertain the forward and after center gravity limits of the aircraft was given. Then, the control capacity of the flying wing transport was calculated with suggested method. At last, for the problem of the longitudinal stability of the flying wing transport couldn’t meet the requirements, the effective measure was researched to improve the longitudinal flying qualities. Research results show that the flying wing transport has special control characteristics to pursue high lift-drag ratio. Reasonable design of the forward and after center gravity limit and the stability augmentation system control law can assure satisfied flying qualities for flying wing transport.
flying wing; forward and after center gravity limits; longitudinal static stability; short period mode; control law
2014-12-15;
2015-04-25;
时间:2015-06-24 15:03
吕新波(1977-),男,山西芮城人,高级工程师,硕士,主要从事飞机操纵性、稳定性设计和研究工作。
V212.1
A
1002-0853(2015)05-0395-04
