船用光伏发电系统最大功率跟踪及自动跟踪控制研究
2015-03-14李文才
李文才,石 岩
(河北工程技术高等专科学校,河北 沧州 061001)
船用光伏发电系统最大功率跟踪及自动跟踪控制研究
李文才,石岩
(河北工程技术高等专科学校,河北 沧州 061001)
摘要:太阳能是一种新型的可再生清洁能源,资源丰富,对环境无任何污染,被越来越多的用在船舶上。搭载光伏发电系统的船舶具有经济性好、噪音低、振动小、安全性好及无污染等优点,已经得到了初步应用。为研究光伏发电系统在船舶上的应用,针对如何提高光伏发电系统输出功率,提高光伏发电系统的发电效率展开研究,重点对最大功率跟踪控制及自动跟踪控制技术的实现进行研究与分析。
关键词:太阳能电池;最大功率跟踪;变步长扰动观测法
0引言
太阳能是重要的可再生能源, 具有资源丰富、清洁无污染等特点,已成为一种重要的自然能源,在民用住宅光伏系统、交通工具及部分军工产品中得到广泛应用。近年来,太阳能也被越来越多的应用在船舶上,船舶上面搭载太阳能电池,利用太阳能转化的电能为船舶提供能源。搭载光伏发电系统的船舶具有噪音低、振动小、安全性好及节能环保等优点,同时可提高船舶机动性和操纵性[1-2]。
目前,太阳能光伏发电系统相关的研究已很多,但在船舶这一特殊的运动载体和水中航行这一特定环境下的研究还相对欠缺,尤其是如何提高光伏发电系统输出功率,提高光伏发电系统的发电效率等方面,还有很多问题需要进一步的突破。因此,开展船用光伏发电系统最大功率跟踪(简称MPPT)及自动跟踪的研究很有必要。
本文首先就太阳能光伏发电系统进行介绍,重点对Boost型的DC-DC变换器实现MPPT的原理进行分析。并采用变步长扰动观察法实现最大功率跟踪,完成程序流程图和设计方法,并在Matlab仿真软件中搭建模型进行仿真与分析[3]。
1太阳能发电原理
太阳能光伏发电系统主要是利用太阳能电池板等装置收集太阳光的辐射能量,然后通过光电转换,产生电能。根据不同的用电需求,产生的电能既可以直接接入用电设备为负载供电,也可以与备用的蓄电池组进行连接,通过蓄电池组将能量储存起来,供后续使用[3]。
太阳光照射在太阳能电池上,电池上面的半导体p-n结吸收光子,形成新的空穴-电子对,在p-n结电场的作用下,空穴由n区流向p区,电子由p区流向n区,导致内部产生电动势,接通电路回路后就形成电流,从而实现把光能转变为电能。
太阳能电池的单体等效电路模型,如图1所示。其中:I为恒流源,Ip为电流;D为理想二极管;Id为流过p-n结的结电流;Rs为旁路电阻,代表其他参数引起的漏电流所对应的阻抗;Rs为串联电阻,表示电路损耗对应的阻抗;Ro为外部负载电阻。

图1 太阳能电池的实际等效电路Fig.1 Equivalent circuit of Solar cells
光伏电池等效电路的基本工作原理是:在太阳光照射下,把p-n结看作一个恒流源与理想二极管并联,太阳能电池光照后产生一定的光电流Ip,其中一部分用来抵消结电流Id,另一部分即为供给负载的电流Io,其中有一部分电路损耗在Rs上。
通过对等效电路的仿真,验证该等效电路可准确描述光伏的电气特性,基本复现太阳能电池板的工作特性,可用于后续MPPT算法的论证与仿真。
2太阳能光伏系统
最大功率跟踪的基本原理是:对于一般线性电路,当电源内阻与外部负载电阻大小一样时效率最高。通过上一节的光伏等效电路的分析知道光伏等效电路不是线性的,可以通过后级连接DC/DC调节器,使光伏电路的内阻与外部负载电阻时刻保持一致,保持最大功率输出。由于负载轻易不可调节,通过接入DC/DC变换器调节输入和输出电压,可以实现最大功率调节的目的。
图2是光伏发电系统框图。如图所示,光伏方阵输出电压Upv经过DC/DC电路后供给负载。控制系统采集光伏板的输出电压和电流,根据所采用的MPPT算法判断系统是否工作在最大功率点上,若不是,则需要通过改变开关管PWM控制信号占空比,改变光伏方阵工作电压,让工作点向最大功率点靠近直至趋于稳定。

图2 光伏发电系统的系统框图Fig.2 Block diagram of photovoltaic power generation system
3DC/DC变换器设计
太阳能光伏最大功率跟踪系统常采用的DC/DC变换电路有很多种类型,典型的有Buck降压电路、Boost升压电路及丘克Cuk电路等,每个电路各有其优缺点,适用于不同的应用场合。本系统采用典型的Boost型升压式变换器作为系统中的DC/DC变换器。其优点是驱动电路特别简单,缺点是输出侧二极管的电流是脉动大,使输出纹波也相应较大。Boost型的MPPT电路原理图如图3所示。

图3 Boost型MPPT电路原理图Fig.3 MPPT circuit diagram based on Boost topology
Boost变换器实现MPPT的思路是将负载等效为某个与光伏阵列连接的阻抗,并且当该阻抗等于光伏阵列在当前工作点的最佳匹配负载时,就可以完成MPPT控制。具体实现方式是,采用PWM控制技术,调节开关管的占空比,改变输出电压值,以达到跟踪的目的。
4MPPT及自动跟踪实现方法
目前,MPPT使用最多的控制方法是电导增量法、模糊控制法和扰动观测法等,其实现MPPT控制的原理基本类似,具体实现方法各有差别。
扰动观测法由于其实现算法简单、硬件要求不高、应用成熟等优势,得到广泛应用[4]。其基本实现方法是通过DSP数字处理器在每个周期采集光伏电池板的电压和电流信号,然后进行计算,得到输出功率值。然后与上一周期的输出功率值进行比较,若输出功率没有发生变化,则保持当前输出电压不变,若功率比上一周期变大,则继续加大扰动,使输出功率继续增大;反之,若功率比上一周期变小,则减小扰动,使输出功率不再变小[5-6]。通过这些控制方法,使每个周期的输出功率达到最大值,实现最大功率跟踪的目的。
传统的扰动观测法实现方法是通过在每个周期与上一个周期比较功率值变化的方法,每个周期对工作点电压按固定的步长进行扰动,使输出功率稳定在最大功率点附近。但是传统的实现方法,存在跟踪精度和跟踪速度的矛盾:如果要得到获得较快的跟踪速度,需要采用较大的干扰步长,加大步长会导致工作点摆动越大,对跟踪精度带来不利影响;如果要追求跟踪精度,需要采用较小的干扰步长,降低跟踪速度,然而当光照条件发生剧烈变化的情况下会造成更多的功率损失。传统的扰动算法还存在另外一个问题:当光强剧烈变化时可能会有误判的现象发生,使工作点不断偏离最大功率点。
船舶光伏发电系统与其他普通应用场合的光伏发电系统最大的区别就是光伏阵列所处的环境,船舶上的光伏阵列会随着船舶自身一直处于运动的过程中,有时船身会有大的颠簸,这样会造成太阳能电池板所接受太阳光经常会发生剧烈的变化,这对MPPT的控制增加了难度。
考虑到传统的扰动观测法的问题,以及船舶光伏阵列本身接受太阳光不稳定等因素。本文提出了一种基于传统的扰动观测法的简单的改进控制方法,即使用变步长的控制方式,通过改变步长和间歇扰动判断来改善问题。可以根据功率差的大小设置扰动的步长。当2次扰动间功率差值较大时,选用较大的步长,使工作点快速地转移到最大功率点附近;当2次扰动间功率差值较小时,选用较小的步长。
系统的程序算法流程如图4所示。其中,变量k用于判断本次计算是否进行电压扰动,当k=1时,进行扰动,否则不进行扰动。Dp用于表示本周起与上一周期的输出功率差。dp>0,表示本周期的输出功率大于上一个周期的输出功率;dp<0,表示本周期的输出功率小于上一个周期的输出功率。变量ku用于表示扰动的方向,当ku=1时,进行反向扰动,否则进行正向扰动。
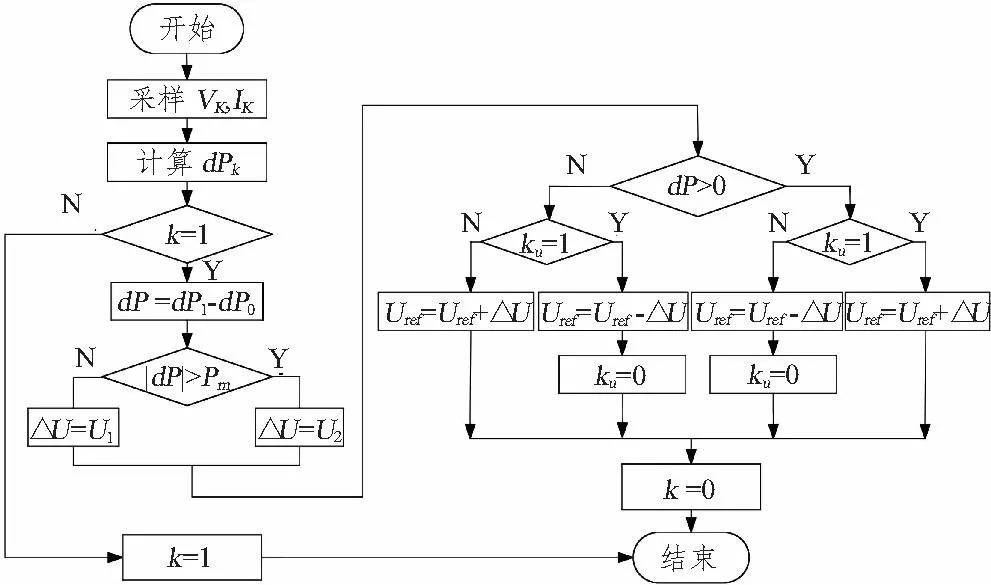
图4 变步长扰动观测法程序流程图Fig. 4 Program flow chart of variable step perturbation and observation method
5MPPT仿真分析
在Matlab/Simulink中,搭建基于Boost型升压变压器的采用变步长扰动观察法的MPPT系统仿真模型,如图5所示。
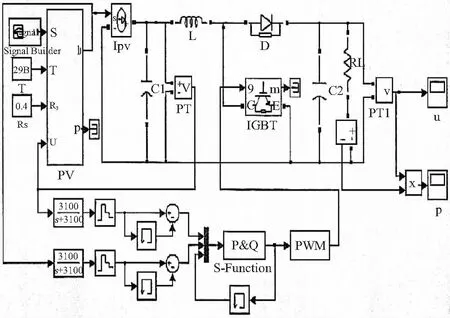
图5 基于扰动观察法的光伏系统的MPPT仿真模型Fig.5 MPPT Simulation model of photovoltaic system based on a perturbation and observation method
首先对扰动观察法进行仿真设置,采用ode23tb(stiff/TR-BDF2)变步长算法,输出功率设为20 W,仿真时间设为1.5 s,扰动步长分别设为0.001,0.005,0.01进行仿真,比较输出功率随着扰动步长的变化。
当扰动观察法控制算法中的扰动歩长取为0.001时,得到如图6所示的输出功率跟踪曲线。由图可以看出,输出电压跟踪速度较慢,在t=0.7 s左右,输出功率才达到设定功率。

图6 步长为0.001时输出功率波形Fig. 6 Power output waveform when step is 0.001
当扰动观察法控制算法中的扰动歩长取为0.005时,得到如图7所示的输出功率跟踪曲线。由图可以看出,输出功率的跟踪速度明显加快,在t=0.2 s左右,输出功率就达到了设定功率,输出功率的跟踪精度也不错。
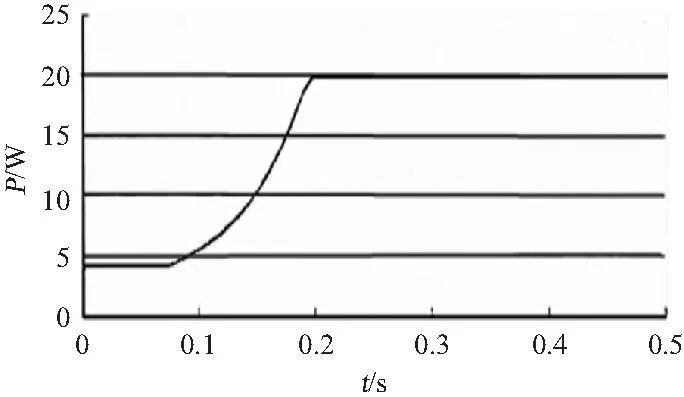
图7 步长为0.005时输出功率波形Fig.7 Power output waveform when step is 0.005
当扰动观察法控制算法中的扰动歩长取为0.01时,得到如图8所示的输出功率跟踪曲线。由图可以看出,输出功率的跟踪速度明显加快,在t=0.1 s左右,输出功率就达到了设定功率,但是输出功率明显出现了震荡。
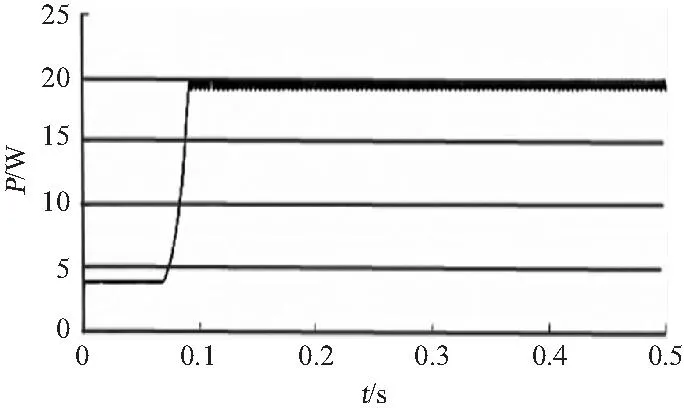
图8 步长为0.01输出功率波形Fig.8 Power output waveform when step is 0.01
由仿真结果可看出,步长的大小对输出功率的跟踪情况有很大的影响。采用较大步长时,输出功率跟踪速度较快,可以较快到达设定的输出功率,但随着步长的变大,跟踪精度会较差,输出功率出现振荡。采用较小步长时,跟踪速度较慢,需要较长的时间才能达到设定输出功率,但是可以较好的保证跟踪的精度。
6结语
本文主要针对船用的光伏发电系统进行了研究,重点对系统中的最大功率跟踪及自动跟踪控制技术进行了研究。设计了Boost型升压变换器MPPT电路,并采用了适用于船舶特殊环境下的变步长扰动观测法控制技术,实现最大功率跟踪及自动跟踪控制。在Matlab/Simulink中搭建了仿真模型,并对不同步长情况下的输出功率的跟踪情况进行了仿真。仿真结果显示,扰动观察法中歩长的大小对太阳能光伏发电系统MPPT控制影响很大,步长既不能过大,也不能过小,可以综合这2个因素,在不同情况下选择合适的歩长,即采用变步长的控制方式可以达到最理想的最大功率跟踪及自动控制跟踪效果。
参考文献:
[1]岳蕾,张志国,彭娅玲.燃料电池作为船舶动力装置的可行性分析和研究[J].舰船科学技术,2009,31(2):63-66.
YUE Lei,ZHANG Zhi-guo,PENG Ya-ling.The analysis and research of fuel cell′s feasibility as the power device of ships[J].Ship Science and Technology,2009,31(2):63-66.
[2]黄允千,刘静.搭载太阳电池的船舶电源系统[J].上海海事大学学报,2005,26(1).
HUANG Yun-qian,LIU Jing.Design of marine electric power system with solar cell[J].Journal of Shanghai Maritime University,2005,26(1).
[3]陈立剑,徐建勇.太阳能光伏电力推进在船舶上的应用研究[J].航海工程,2013,42(4).
[4]汤强.光伏发电系统最大功率跟踪控制研究[D].太原:山西大学,2011.
[5]尤丽萍.光伏发电系统中最大功率跟踪控制算法的研究和控制器的设计[J].智能计算机与应用,2014,4(4).
YOU Li-ping.Design of tracking research and control algorithm of the maximum power of the photovoltaic power generation system[J].Intelligent Computer and Applications,2014,4(4).
[6]孙世峰,李慧,盛荣慧.某大型补给船自控装置综合供电系统的续研[J].舰船科学技术,1998,20(3):49-51.
Maximum power tracking photovoltaic power generation system and
automatic tracking control research for ship
LI Wen-cai,SHI Yan
(Hebei Engineering and Technical College,Cangzhou 061001,China)
Abstract:Solar energy is a kind of renewable clean energy, is rich in resources, without any pollution to the environment, is being used in the ship more and more frequently. Ship with the solar battery has many advantages,such as, economic, low noise, small vibration, high security, environment friendly, so as to get used. In order to explore the application of photovoltaic power generation system on the ship,this article focuses on how to increase the output power of photovoltaic power generation system and how to improve the conversion efficiency, study and analyze the maximum power tracking control technology and automatic tracking control system.
Key words:solar cell;maximum power point tracking;variable step perturbation and observation method
作者简介:李文才( 1974 - ) ,男,副教授,主要研究方向为电气工程及其自动化。
收稿日期:2014-08-12; 修回日期: 2014-10-14
文章编号:1672-7649(2015)02-0136-04
doi:10.3404/j.issn.1672-7649.2015.02.029
中图分类号:TM615
文献标识码:A
