基于同步坐标系的三相电网软件锁相环仿真研究
2015-03-06鲁大岱
鲁大岱,方 敏
(1.安徽三联学院 电子电气工程学院,合肥 230601;2.合肥工业大学 电气与自动化工程学院,合肥 230009)
基于同步坐标系的三相电网软件锁相环仿真研究
鲁大岱1*,方 敏1,2
(1.安徽三联学院 电子电气工程学院,合肥 230601;2.合肥工业大学 电气与自动化工程学院,合肥 230009)
风电场前期安装的部分硬件设备已不能更换,同时又要求实现低电压穿越功能,这就需要一种简单实用的方法来获取电网电压变化的信息。阐述了软件锁相环的基本结构和原理,从理论上分析系统的稳定性和跟随特性,用矢量解耦的方法研究了基于单同步旋转坐标系的软件锁相环的设计方法,用二阶系统的标准形式对调节器参数进行整定。根据实际条件,计算出用于仿真的各个系统控制参数。利用Matlab/Simulink软件搭建该仿真模型,并在平衡电网电压和不平衡电网电压情况下,对系统性能进行分析比较。仿真结果说明,同步坐标系方法能够获得较好的电网信息,三相平衡电网时适合采用单同步坐标系方法,电网平衡度大时适合采用双同步坐标系方法,该方法有一定的工程应用价值。
电压矢量;软件锁相环;同步坐标系;仿真
0 引言
在风力发电并网变流器、太阳能发电并网变流器、静态无功补偿器、有源电力滤波器、不间断电源、多电平高压直流变换器以及电机数字控制器等系统中,电网的实时相位信息对系统控制的稳定性和跟随性能有重要的影响。然而,实际电网是一个复杂的动态系统,非线性负载、电网故障以及发输配电系统的限制条件等因素都会导致电网电压向量出现不同程度的失真和畸变。我国前期安装的风机很少具有低电压穿越功能,这就需要一种简单实用的方法来获取电网电压变化的信息。因此,研究在电网波动下的简单可靠的相位同步方法变得十分必要[1-3]。
软件锁相环技术能够有效克服模拟电路温度漂移的影响,在完成锁定相位的同时还能获得幅值、频率等信息,成为现在电力电子控制领域重要的研究对象。本文主要研究了基于同步坐标系的软件锁相环SRF-SPLL(Synchronous Reference Frame Software Phase Locked Loop)的设计方法,该方法在三相电网平衡下的相位突变、电压跌落或骤升情况下都有稳定的锁相角度输出,并提出一定的改进方法,其动态性能良好。
1 软件锁相环基本工作原理
1.1 数学模型
软件锁相环技术来源于硬件锁相环,其基本闭环结构如图1所示。
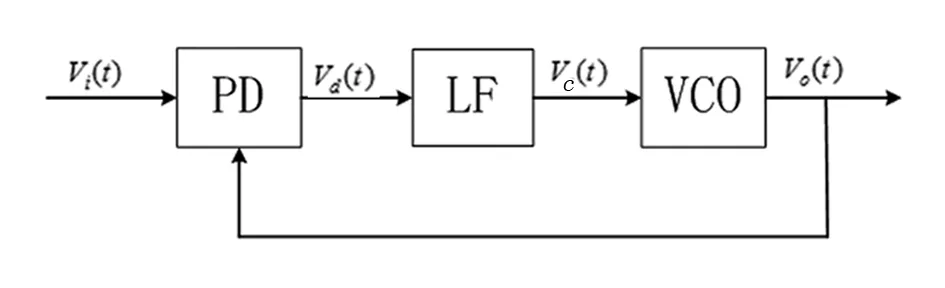
图1 基本闭环锁相环控制结构图
图中PD为乘法鉴相器,VCO为压控振荡器,LF为环路滤波器,Vi(t)为系统给定信号,Vd(t)为偏差信号,Vc(t)为压控振荡器的输入信号,Vo(t)为输出信号。给定信号Vi(t)与压控振荡器的输出信号Vo(t)比较,产生一个对应两信号相位差的误差电压Vd(t),该误差电压经环路滤波器去掉高频分量变为Vc(t),再去调整压控振荡器输出信号的频率和相位。当环路相位锁定时误差电压为一定值,压控振荡器输出信号Vo(t)的频率差为零。

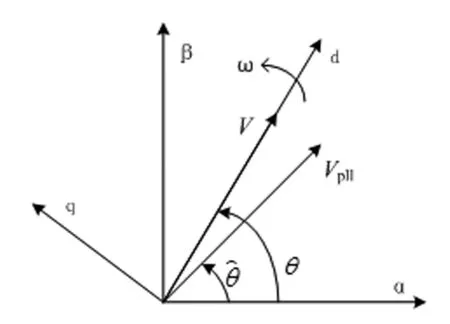
图2 单同步坐标系及其电压矢量
1.2 三相电网锁相环基本原理
三相电网锁相环控制结构图如图3所示。实际采样的三相电网电压首先进行Clark变换得到两相静止坐标系下的uα和uβ,再经过Park变换,得到同步坐标系下的电压ud和uq。为使锁相环输出电压Vpll与实际电压矢量V重合,本文引入闭环控制,即通过加入PI调节器用来控制电压分量uq。这样当频率稳定时,uq为一直流量,由于PI调节器有直流无静差调节特性,从而可使uq为0,进而实现锁相功能。PI调节器的输出与电网同步角频率ω1比较,再取积分即得到锁相后的电角度。
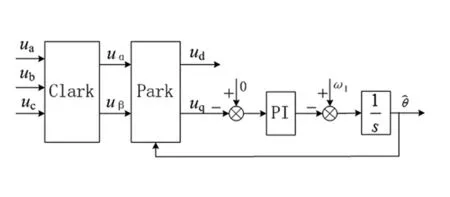
图3 三相电网锁相环控制结构图
为方便理解,下面进行定量分析。假设三相电网电压为:
ua=Umcos(θ)
(1)
采用恒幅值变换,Clark变换矩阵为:
(2)
Park变换矩阵为:
(3)
把公式(1)表示的三相静止坐标系的电压变换到两相静止坐标系的电压,结果为:
(4)
把公式(4)表示的两相静止坐标系的电压变换到两相旋转坐标系的电压,结果为:
(5)
2 软件锁相环的设计

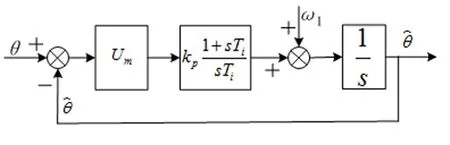
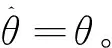
图4 锁相环传递函数图
由图4可以得到,该系统开环传递函数为:
(6)
系统闭环传递函数为:
(7)
二阶系统标准形式为:
(8)

二阶系统稳定运行的条件:ζωn>0,考虑到动静态性能,本文取相电压幅值Um=311,阻尼比ζ=0.707,调节时间ts=2ms,误差带Δ=2%。计算得kp=12.86,Ti=0.59ms,固有频率ωn=2828rad/s,峰值时间tp=1.6ms。
为检验该系统动态特性,利用Matlab仿真软件生成的闭环系统波特图如图5所示。
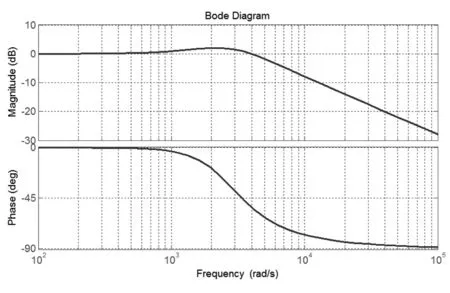
图5 闭环系统波特图
由图5可以看出,系统具有较大的带宽,跟踪和较强的复现信号能力。较大的带宽会带来高频信号的干扰,同时考虑到实际电网谐波成份较低,这可以在系统中串联滤波环节进行抑制[4]。
3 仿真结果
利用Matlab软件建立软件锁相环系统的仿真系统,系统初始参数设置如表1所示。
表1 系统仿真参数
系统仿真图如图6所示。
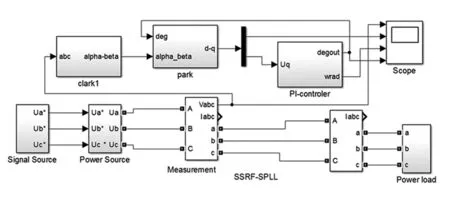
图6 基于同步坐标系的锁相环系统仿真图
为了分析在不同外界条件下SSRF-SPLL系统的动静态响应,在上述初始状态下,设置了不同的仿真条件,如表2所示;仿真波形如图7~图10所示。
由图7和图8可知,在电网平衡和电压对称跌落时,SSRF-SPLL都有良好的动静态性能。图9表明,在三相对称相位时,SSRF-SPLL只是在突变时刻有较大扰动,但系统仍然能在3~4ms内进入稳定状态,动态调节时间短。图10表明SSRF-SPLL在不对称跌落下稳态分量存在周期性的扰动,这是因为实际电网电压信号中含有负序电压分量,经公式(2)Clark变换后合成电压矢量中存在2倍频扰动分量[5]。对此,我们进行简要分析。
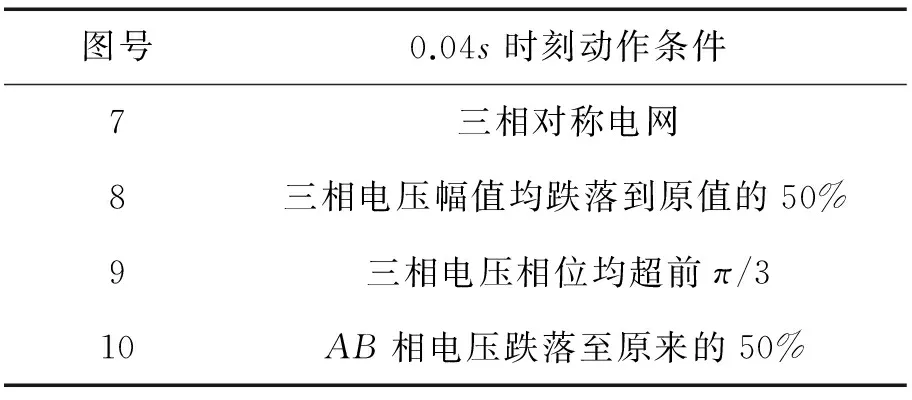
表2 仿真条件列表
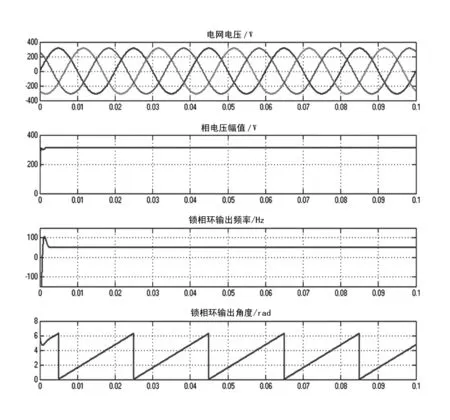
图7 三相平衡状态下SSRF-SPLL动态性能
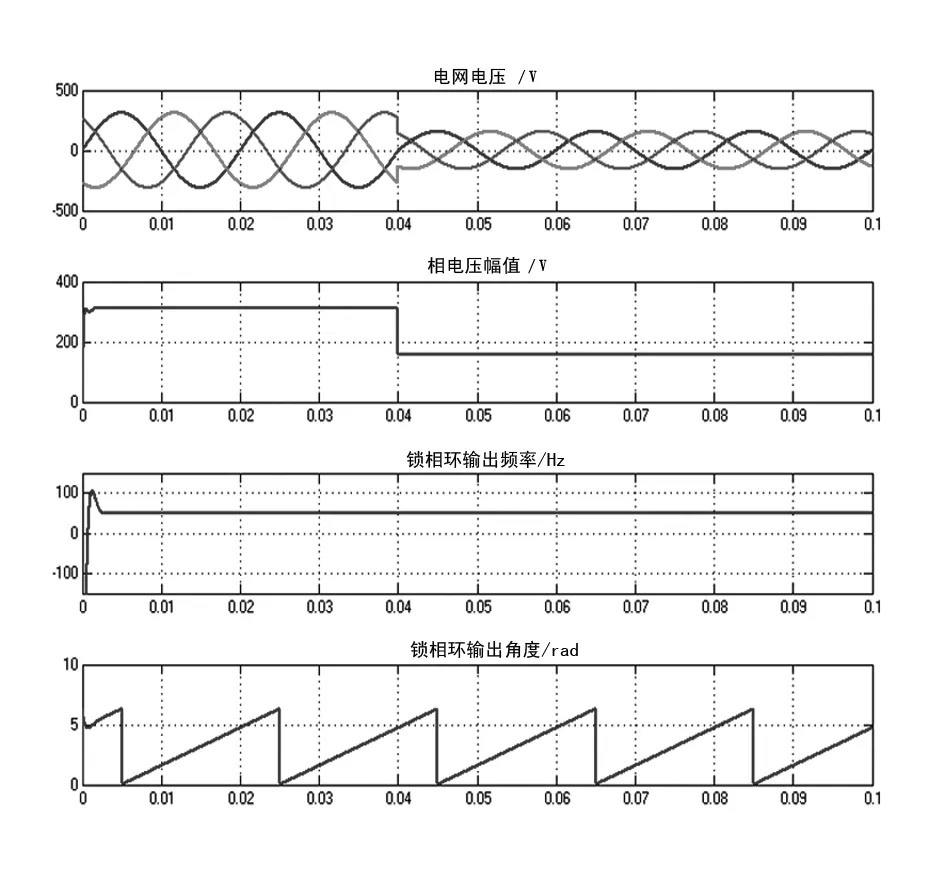
图8 三相电压跌落时SSRF-SPLL动态性能
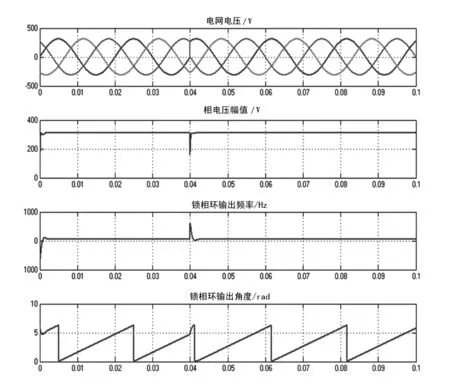
图9 三相相位突变时SSRF-SPLL动态性能
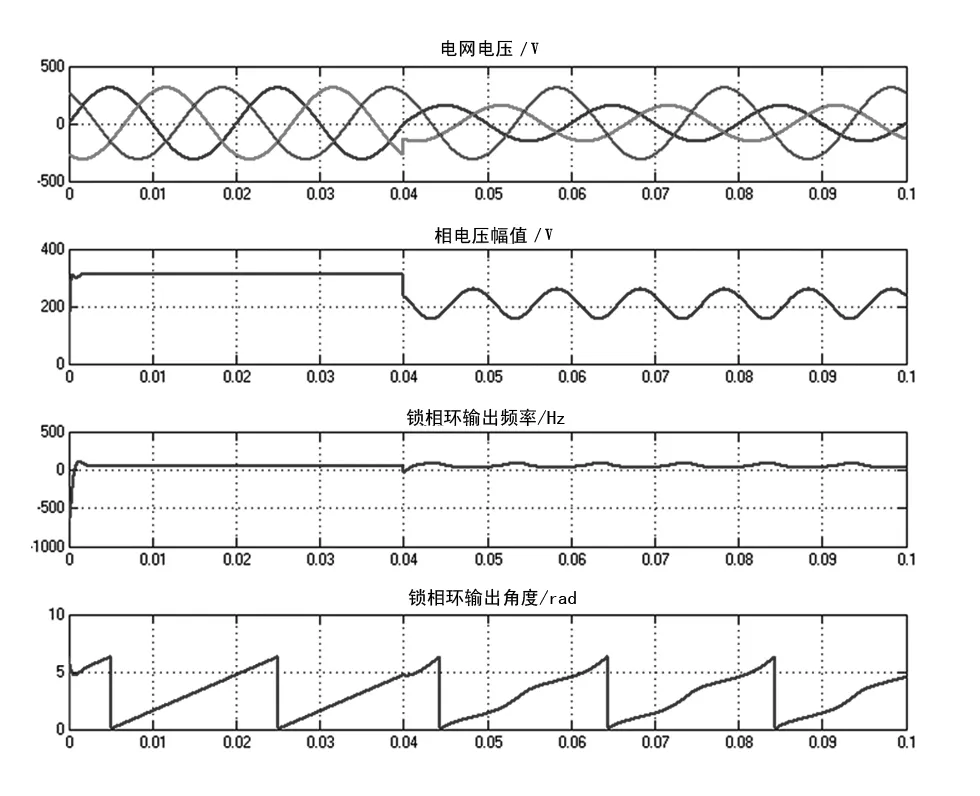
图10 AB相电压跌落时SSRF-SPLL动态性能
电网不平衡时,实际三相电网电压会含有正序、负序和零序分量,假设正序分量的初始相位为0,则公式(1)转化为公式(9):
ua=Um+cos(ωt)+Um-cos(-ωt+
(9)

(10)
由公式(10)可以看出,电网电压矢量不再是如公式(4)所表示的只含有正序分量而是由以角速度ω逆时针旋转的正序分量和以角速度ω顺时针旋转的负序分量组成[6]。对公式(10)表示的电压进行矢量合成,得到电网电压幅值V为
Vαβ=
(11)
由公式(11)可以看出,合成的实际三相电网电压矢量Vαβ中含有二次谐波扰动,这样给定信号中就会含有二次谐波分量,进而影响锁相环的精确度[7],从图10的相电压幅值ud的波形也可以看出。文献[8]为解决这一问题,采用双同步坐标系(DDSRF-SPLL)来克服该困难,但考虑到该方法加入滤波器,且需要大量的数学运算,同时该方法对电网平衡时系统性能并没有改善多少[9]。因此,本文引入电网平衡度εu概念,来表示电压偏移程度。
(12)
其中,UN表示负序电网电压值,UP表示正序电网电压值。当εu小于某一阀值,采用单同步坐标系方法;当εu大于某一阀值,采用双同步坐标系方法。该阀值可根据实际电网状况修改。本文取阀值为0.10,得到AB相电压跌落时DDSRF-SPLL动态性能仿真图如图11所示,该性能比图10有较好的改善。
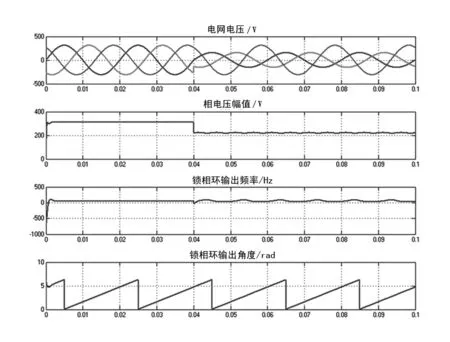
图11 引入阀值AB相电压跌落时
4 结论
SSRF-SPLL在三相电网平衡状态下时能够实现准确锁相,稳态性能好,且对电网电压跌落、相位突变、频率突变都有很好的动态响应,同时控制系统能够输出三相电网电压幅值、频率、相位等信息。但SSRF-SPLL在三相电网非平衡状态下时三相电网电压的幅值、相位等出现周期性的扰动,这时根据电网平衡度大的特点采用DDSRF-SPLL能实现较好的性能,该方法有一定的工程应用价值。
[1] 张兴,张崇巍.PWM整流器及其控制[M].北京:机械工业出版社,2012.
[2] 郭敏,赵成勇.应用于MMC-HVDC控制器的改进软件锁相环[J].南方电网技术,2012,6(6):81-85.
[3] 杨华.基于DSP28335的软件锁相环及其在PWM整流器中的应用[J].船电技术,2013,33(11):19-23.
[4] 龚锦霞,解大,张延迟.三相数字锁相环的原理及性能[J].电工技术学报,2009,24(10):94-99.
[5] 邵文昌.风力发电网侧变流器控制策略研究[D].合肥:合肥工业大学,2009.
[6] 范守婷,王政.风力发电并网变流器同步技术研究[J].电力系统保护与控制,2012,40(24):100-106.
[7] 杨华.基于DSP28335的软件锁相环及其在PWM整流器中的应用[J].船电技术,2013,33(11):19-23.
[8] 张保青,崔旅星,王晗.电网不平衡情况下一种新型PLL的设计与实现[J].电力电子技术,2013,47(6):57-59.
[9]M.Karimi-Ghartemani,M.R.Iravani.Amethodforsynchronizationofpowerelectronicconvertersinpollutedandvariable-frequencyenvironments[J].IEEETransactionsonPowerSystems,2004,19(3):1263-1270.
(责任编辑:尹晓琦)
Simulation Study of Software Phase-Locked Loop Based on the Synchronous Reference Frame for Three-phase Grid
LU Da-dai1*, FANG Min1,2
(1.School of Electronic and Electrical Engineering, Anhui Sanlian University, Hefei 230601, China;2.School of Electrical Engineering and Automation, Hefei University of Technology, Hefei 230009, China)
Due to the part of the hardware equipment is unchangeable in a wind farm, and at the same time it requires to achieve the low voltage ride through function, a simple and practical method is needed to obtain the information of grid voltage change. The basic structure and principle of software phase-locked loop were described, and the stability and following characteristics of the system were analyzed. A design method of software phase-locked loop was put forward based on the synchronous reference frame with vector decoupling method. Each simulation parameter of actual control system was calculated by tuning parameters of the regulator using the standard second-order system. The simulation model was built by using Matlab/Simulink, and the system performance was compared under the conditions of balanced and unbalanced power grid .The simulation results showed that the method of synchronous reference frame could obtain the grid information better. Single synchronous reference frame is suitable for three-phase balanced grid, and double synchronous reference frame is suitable for three-phase unbalanced grid. The research result is valuable to engineering application.
voltage vector; software phase-locked loop (SPLL); synchronous reference frame; simulation
2014-11-26
安徽省振兴计划新专业建设项目(2013zytz082);安徽三联学院校级科研项目资助(2014Z013)
鲁大岱(1987-),男,山东滕州人,助教,硕士,主要从事新能源发电控制技术研究;*为通讯作者。
TN
A
1009-7961(2015)01-0026-05