基于模糊理论的永磁同步电机直接转矩弱磁控制
2015-03-06刘青阳魏国亮王永雄
刘青阳,魏国亮,王永雄
(上海理工大学 光电信息与计算机工程学院,上海 200093)
永磁同步电机的转子是永磁体,具有结构简单、使用方便、可靠性高等优点,吸引了应用领域的研究员和工业生产者的普遍关注和应用。永磁同步电机已广泛应用于中低功率设备中,如计算机周边设备、机器人、可调速驱动器及电动汽车等。近年来,模糊控制在永磁同步电机直接转矩控制技术中已得到应用,如文献[1]将模糊PID 引入到直流电机调速系统中,使得系统具有良好的动态、静态性能和鲁棒性,并且对参数时变具有良好的适应能力。文献[2]提出在永磁同步电机直接转矩控制系统中,采用解析模糊控制状态选择器替代传统的空间电压矢量选择器的新型控制方法,有效避免了传统直接转矩控制系统在起动和转速突变时,响应速度慢且转矩脉动幅度大的缺陷。文献[3]为永磁同步电机设计了模糊直接转矩控制器和模糊速度PI 控制器。该双模糊控制器能自动调节开关频率,在响应速度,超调方面均优于常规控制器。文献[4]将模糊控制引入到永磁同步电机直接转矩控制中来减少转矩和磁链的脉动并且修复可变开关频率。文献[5]提出使用模糊逻辑与脉宽调制(PWM)有效抑制了定子磁通和转矩脉动。与此同时,弱磁控制在永磁同步电机直接转矩控制中的研究也取得了一定的成果,但应用于弱磁控制的模糊控制器则少有报道。主要集中于基于最大转矩电流比(MTPA)控制的弱磁控制方法,如文献[6]分析了将弱磁控制应用于永磁同步电机电流控制和直接转矩控制中的性能。文献[7]将MTPA 与滑模变结构方法相结合用于永磁同步电机直接转矩控制中,使得系统具有动态响应快、转矩脉动小、在恒转矩区和弱磁区对电机参数变化具有强鲁棒性等特点。文献[8]给出了一种基于最大转矩控制的弱磁控制策略,从中可以看出这种控制策略的优劣较大程度上依赖于参数的选择。虽然基于MTPA 控制的弱磁控制有很多优点,但其不适用于参数和负载条件经常变化的场合,主要适用于空载情况下。基于上述问题,本文将设计模糊控制器用以实现永磁同步电机直接转矩弱磁控制,并且能够实时监测参数变化和负载变化。
1 弱磁控制
在d-q 旋转坐标系下,永磁同步电机的基本方程为
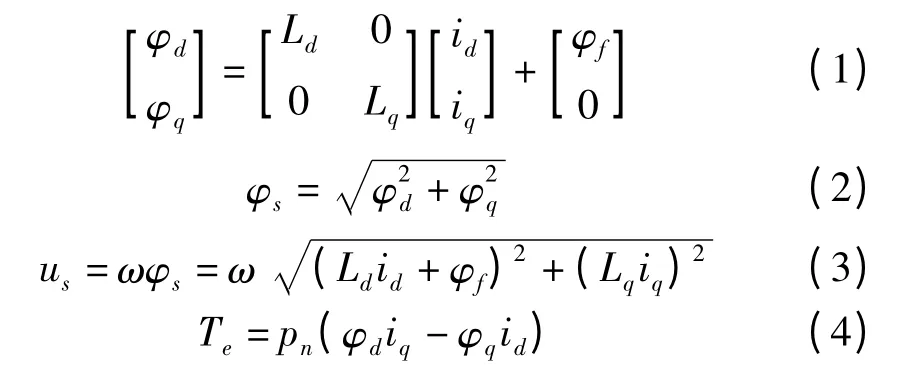
式中,φd、φq为定子磁链矢量d、q 轴分量;id、iq为定子电流矢量d、q 轴分量;Ld、Lq为定子绕组矢量d、q 轴分量;φf为转子永磁体在定子上的耦合磁链;ω 为转子角速度;pn为电机的极对数。
在实际控制系统中,电机由功率半导体器件组成的逆变器驱动,定子电流和端电压必定受到限制,其约束条件为

式中,ismax、usmax分别为电枢电流和端电压允许的最大值。
由以上分析可知,电机不可能无限制的升速,达到电压限制后就必须进行弱磁控制。同时还注意到在直接转矩控制过程中必须保证负载角小于最大负载角,原因在于直接转矩控制的基本原则是通过增大负载角来增大输出转矩,当负载角大于最大负载角时,开关表所提供的电压空间矢量不能足够增大负载角,从而导致输出转矩下降,最终引起系统失控和崩溃,即要实现弱磁控制还要受到转矩的限制。
2 直接转矩控制
永磁同步电机的直接转矩控制基本理论为:通过控制定子磁链幅值保持恒定,改变定子磁链的旋转速度和方向来瞬时调整转矩角δ,从而实现电磁转矩的动态控制,这也是直接转矩控制的基本思想[9]。通过检测逆变器输出的三相相电流,用数学模型可计算出电机的电磁转矩和静止坐标系下的定子磁链。PID 控制器根据转速给定值和实际转速确定转矩给定值,并与反馈转矩相比较,将转矩误差经滞环比较器得到转矩的控制信号。同理计算得到磁链的估算值与给定值,通过滞环比较器比较得到控制信号,磁链和转矩的控制信号再加上定子磁链当前位置信号,经过电压开关矢量表,确定适当的开关状态,控制逆变器进而驱动永磁同步电机。本文引入弱磁模糊控制根据转速测量值和转矩估算值来实时改变磁链给定值已达到扩大调速范围、增加系统稳定性的目的,使得系统更适合应用于负载经常变化的环境中。控制系统结构如图1所示。
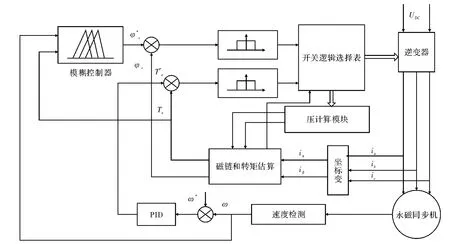
图1 系统结构框图
3 模糊弱磁控制原理
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,从行为上模仿人的模糊推理和决策过程[10]。本文应用该方法首先将操作人员或专家的弱磁控制经验编成模糊规则,然后将来自传感器的速度信号和转矩估计值信号模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,将推理后得到的输出量加到磁链给定上,从而实现弱磁控制。其模糊控制器结构图如图2 所示。
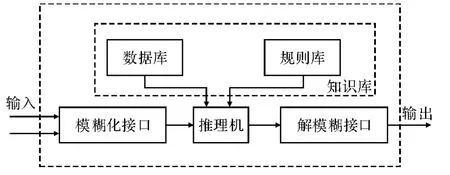
图2 模糊控制结构框图
4 模糊弱磁控制的实现
通过上述分析,在Matlab/Simulink 中搭建如图3所示的永磁同步电机直接转矩模糊弱磁控制仿真模型。仿真中永磁同步电机的参数:母线电压Udc=310 V;定子电阻R=2.875 Ω;d-q 轴电感Ld=Lq=L=8.5 mH;定子磁链φf=0.175 wb;转动惯量J=0.8 g·m2;极对数pn=3。
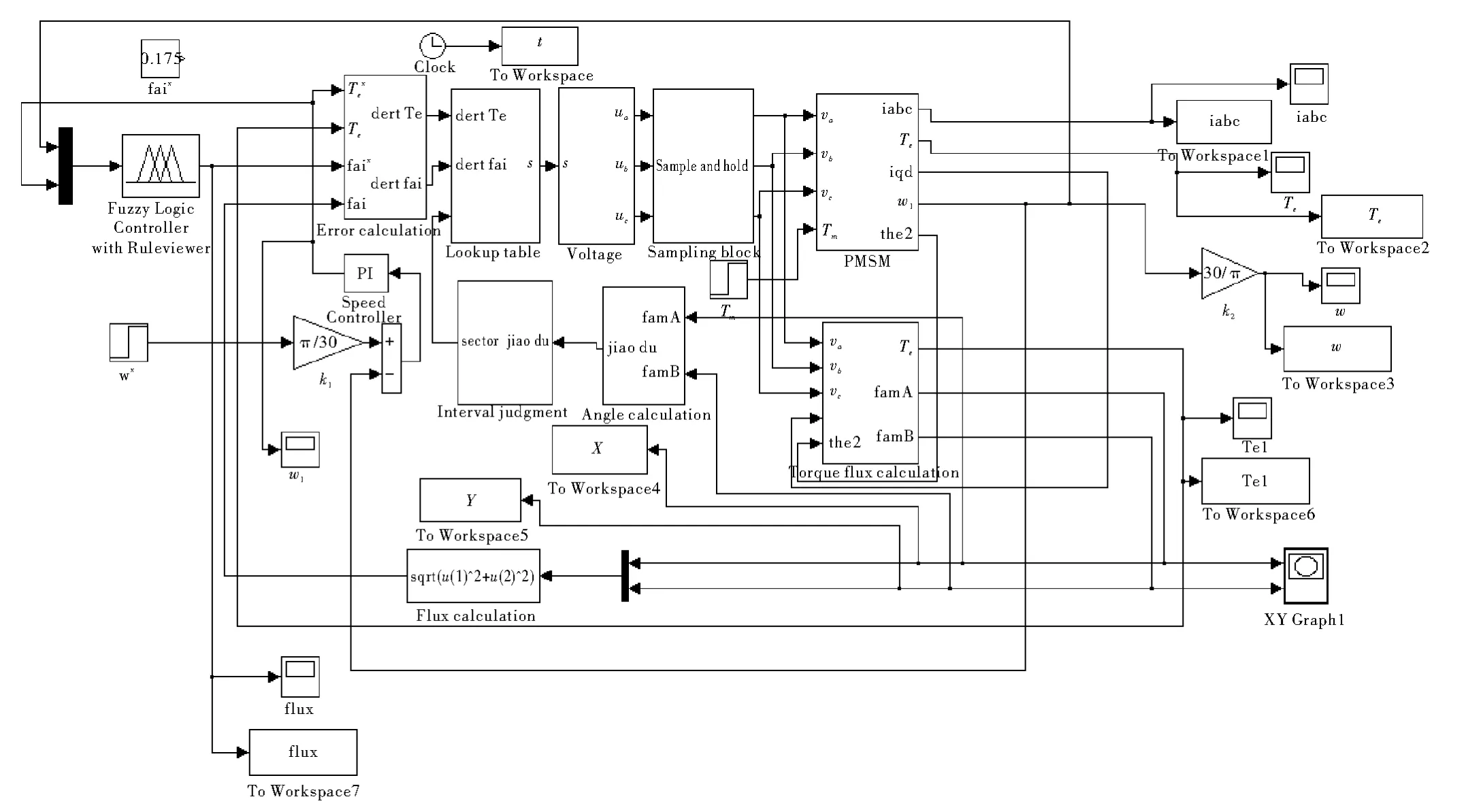
图3 永磁同步电机直接转矩模糊弱磁控制仿真系统
模糊控制器的数据库所存放的是所有输入、输出变量的全部模糊子集的隶属度矢量值,若论域为连续域,则为隶属度函数。本文采用三角形隶属度函数,输入输出隶属度函数如图4 ~图6 所示。
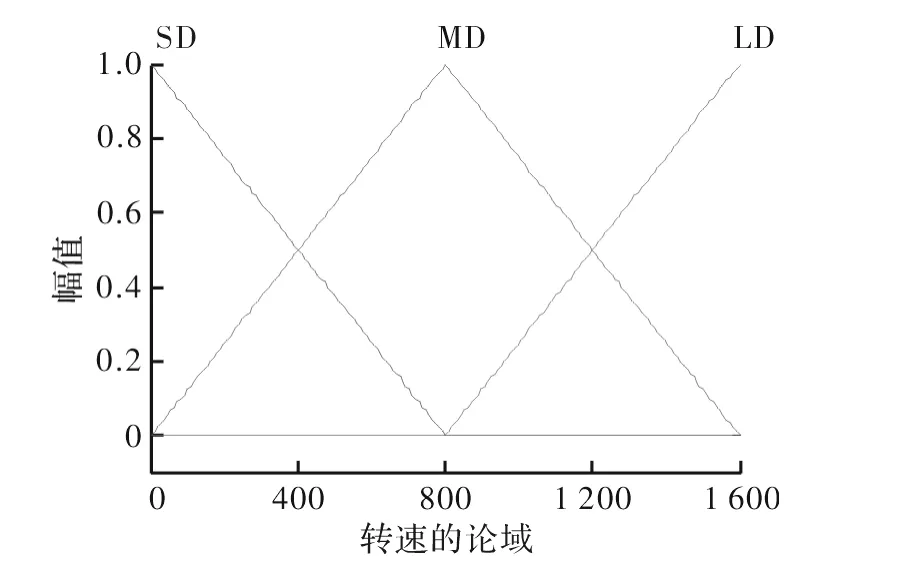
图4 转速输入隶属函数
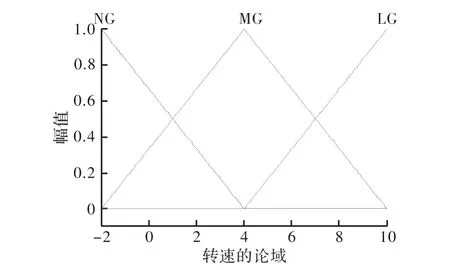
图5 转矩输入隶属函数
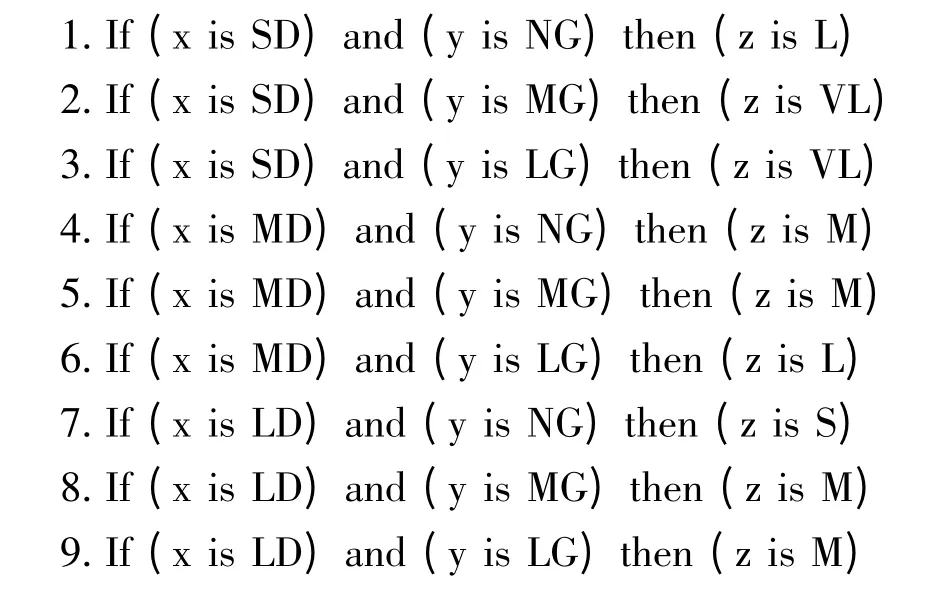
模糊控制器的规则库是由专家的知识或手动操作人员长期积累的经验得到的,是按人的直觉推理的一种语言表示形式。规则库是用于存放全部模糊控制规则的,在推理时为“推理机”提供控制规则。为了满足弱磁控制的电流限制又要满足转矩需求,本文设计模糊规则如下:
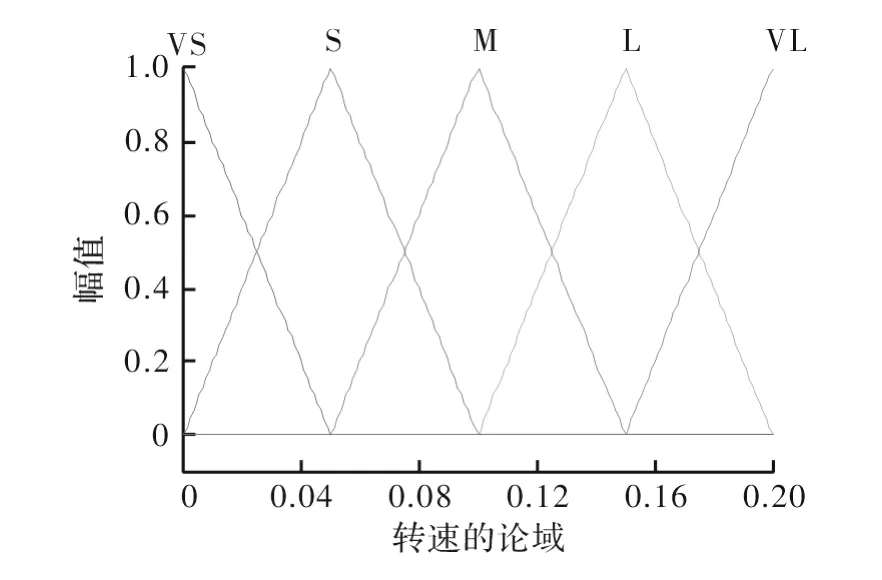
图6 磁链输出隶属函数
5 仿真结果与分析
永磁同步电机直接转矩模糊弱磁控制仿真结果如下:
(1)不加弱磁控制时,磁链设定值0.175,转速设定值初值10 000 r·min-1在0.1 s 变为18 000 r·min-1,并且在0.05 s 时加1.5 N·m 的负载。
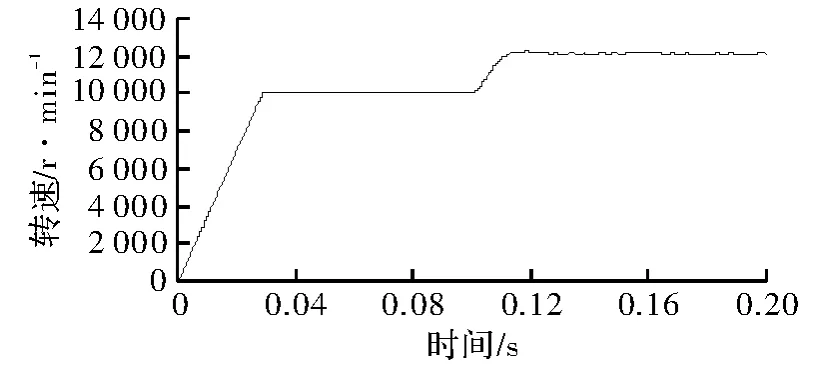
图7 不加弱磁控制时最大转速波形
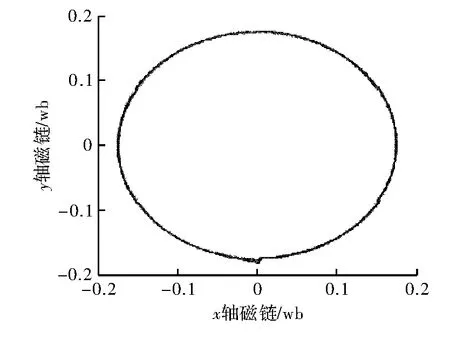
图8 不加弱磁控制时磁链波形

图9 不加弱磁控制时转矩波形
(2)加模糊弱磁控制器,转速设定值初值10 000 r·min-1在0.1 s 变为18 000 r·min-1,并且在0.05 s 时加1.5 N·m 的负载。
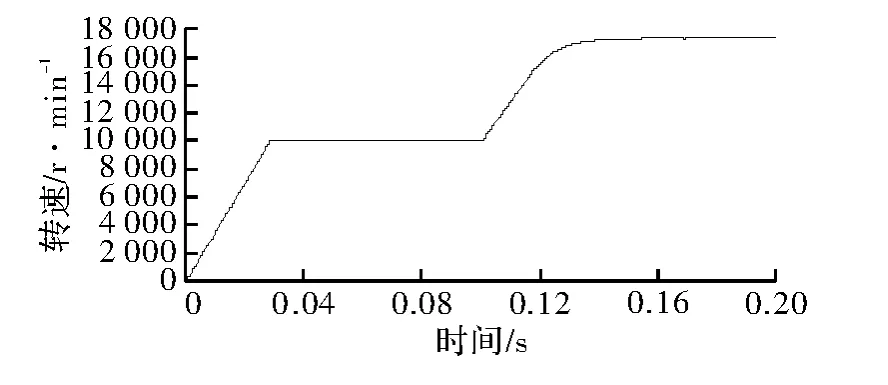
图10 转速波形图
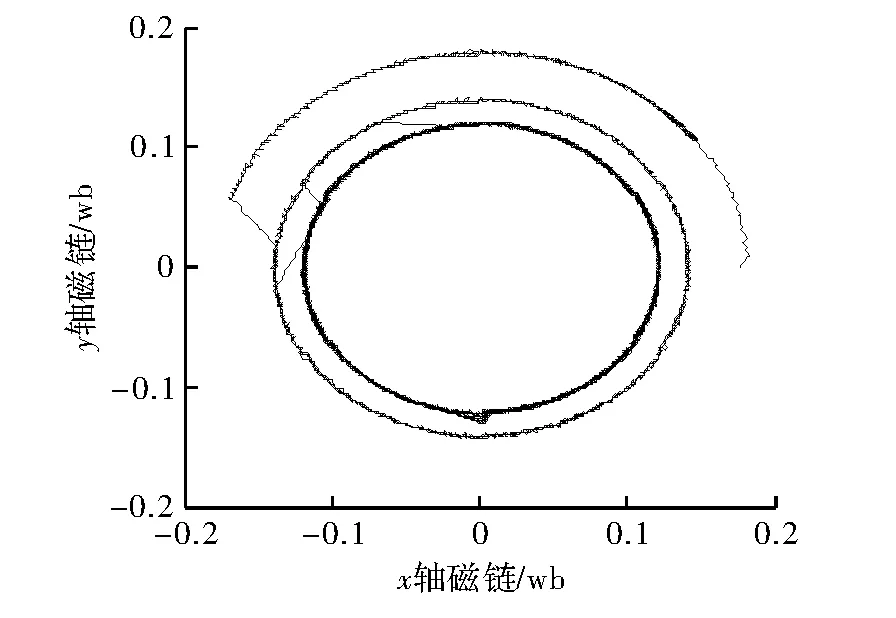
图11 磁链波形图
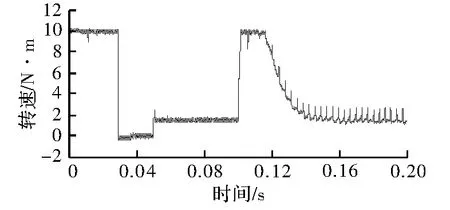
图12 转矩波形图
(3)转速设定值在5 000 r·min-1和2 000 r·min-1间以0.18 s 为周期跳变。
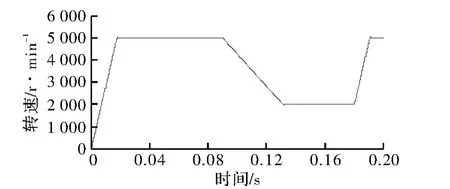
图13 转速波形图
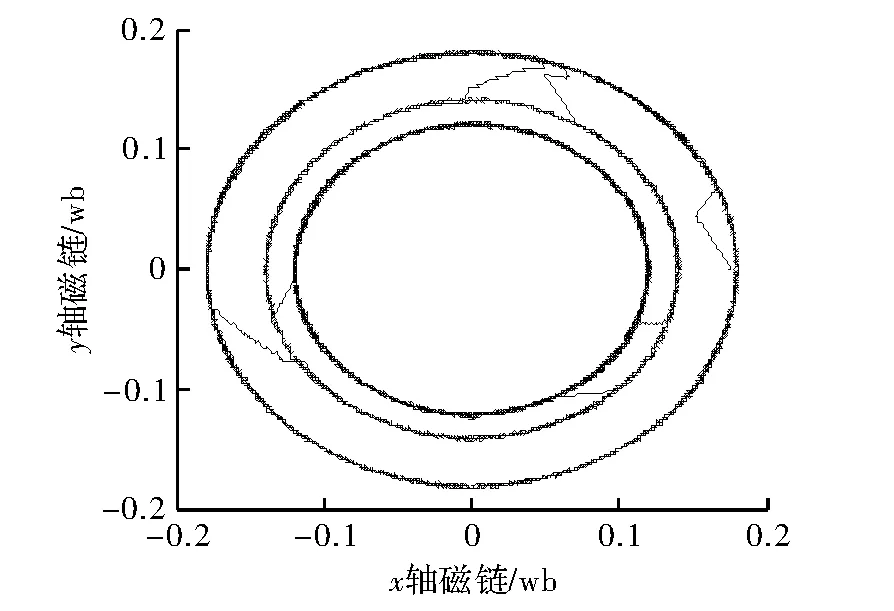
图14 磁链波形图
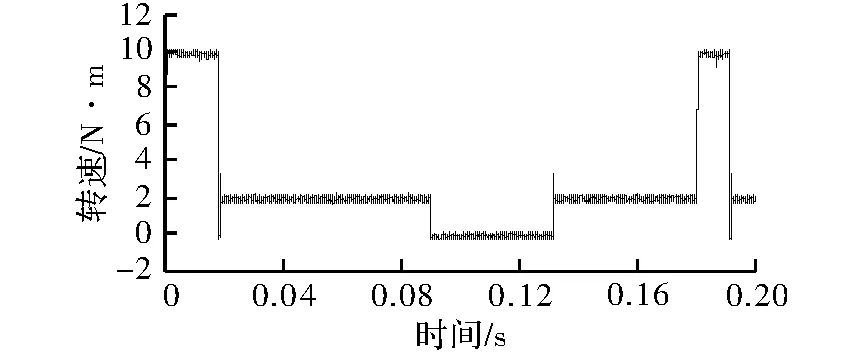
图15 转矩波形图
从图10 可以看出转速可以达到约17 360 r·min-1,与图7 相比转速提高将近50%,同时,当采取不同模糊控制规则时,可以达到更高的范围。由磁链波形看出转速和转矩不同磁链也随之变化。由图12 看出在基速以下时做恒转矩运行,当转速超出基速时在弱磁控制下运行。从图13 ~图15 可知本文所设计的控制策略对基速以下调节效果良好,能够适应转矩变化。
6 结束语
为了扩展转速调节范围,在分析了弱磁控制的约束条件和模糊控制理论的基础上,设计了模糊弱磁控制器。该控制器可以根据转速测量值和转矩估计值的变化,实时调节磁链给定值,达到增加系统稳定性和调速范围,同时又不盲目降低磁链值的目的。最后,通过仿真验证了模糊弱磁控制器的正确性。永磁同步电机直接转矩控制理论还有待进一步完善,其弱磁控制以及电枢反应的研究有待进一步深入研究。
[1] 陆华颖,程光伟,陈凯.模糊PID 双闭环直流电机调速系统仿真[J].电子科技,2011,24(10):56-58.
[2] 黄祯祥,吴俊,郭延文,等.解析模糊控制在直接转矩控制系统中的应用[J].系统工程与电子技术,2006,28(1):103-106.
[3] 程飞,过学迅,别辉,等.电动车用永磁同步电机的双模糊控制研究[J].系统仿真学报,2006,18(2):18-22.
[4] Cui Jiefani,Mu Gang,Fu Yue.Design of PMSM control system based on fuzzy logic[C].Wuhan,China:International Conference on Electrical Machines and Systems,2008.
[5] Gabriel Noriega,José Restrepo,Víctor Guzmán,et al.Direct torque control of PMSM using fuzzy logic with PWM[C].Brighton:42nd International Universities Power Engineering Conference,2007.
[6] Yukinori Inoue,Shigeo Morimoto,Masayuki Sanada.Comparative study of PMSM drive systems based on current control and direct torque control in flux-weakening control region[J].IEEE Transactions on Industry Applications,2012,48(6):2382-2389.
[7] 万健如,宫成,刘暐,等.基于MTPA 的永磁同步电机滑模变结构直接转矩控制[J].电机与控制学报,2012,16(3):30-35.
[8] Lennart Harnefors,Kai Pietilainen,Lars Gertmar.Torque maximizing field-weakening control:design,analysis,and parameter selection[J].IEEE Transactions on Industrial Electronics,2001,48(1):161-168.
[9] 韩如成,潘峰,智泽英.直接转矩控制理论及应用[M].北京:电子工业出版社,2012.
[10]刘金锟.智能控制器[M].北京:电子工业出版社,2009.