Buck 型DC/DC 转换器二次斜坡补偿电路设计
2015-03-06管劲舟李纪磊
管劲舟,李纪磊
(西安电子科技大学 电路CAD 研究所,陕西 西安 710071)
由于DC/DC 变换器中电流模控制较电压模控制方法有许多优点,所以得到了广泛应用[1],但恒定频率下的峰值电流存在问题:(1)当占空比D >50%时,系统的开环不稳定。(2)由于采样的是峰值电感电流而非平均电流的原因而产生系统开环不稳定。(3)次斜坡振荡。(4)抗干扰能力差,当电感中的纹波电流成分很小时,这种情况更严重。但是采用在电流波形上叠加斜坡补偿方法,可以在占空比D >50%情况下使系统稳定,同时也使性能得到大幅改善。
1 产生亚谐波振荡的原因
如图1 所示,IC是与电感电流相比较的误差信号,当系统稳定时,其大小可以认为是固定不变的;m1是功率上管导通时,电感电流上升的斜率,-m2是上管关断下管导通时电感电流下降低斜率。实线三角波形为未加扰动时电感电流,虚线波形为初始时刻存在ΔI0扰动量后电感电流的变化。
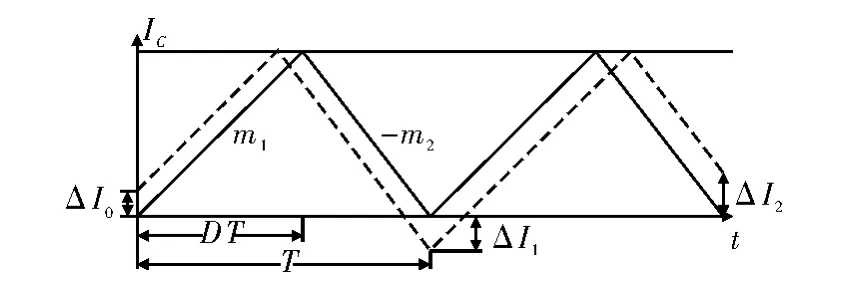
图1 电流环电感电流扰动波形
通过几何知识计算可知,由初始时刻扰动量ΔI0的下个周期初始电流扰动量ΔI1为

则经过n 个周期时间后,ΔI0引起的电流扰动变化量ΔIn为
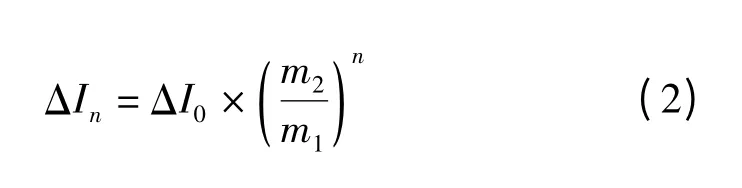
已知
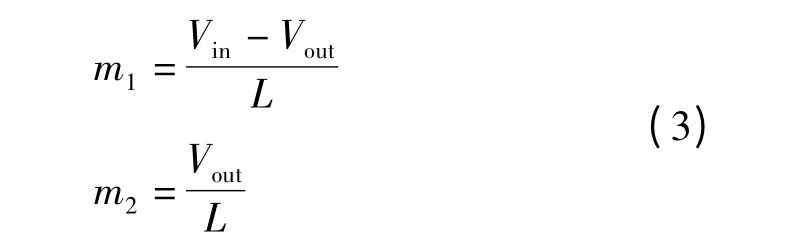
所以

当占空比D <50%时,电感电流扰动量ΔIn会逐渐趋于0,系统稳定。当占空比D >50%时,电感电流扰动量ΔIn会逐渐放大,此时会导致电感电流峰峰值逐渐增大,出现亚谐波振荡现象,使系统无法正常稳定工作。
2 斜坡补偿的基本原理
为使系统在占空比>50%时也能稳定工作,引入了斜率为-m 的斜坡补偿信号。斜坡补偿技术有两种,一种是在误差信号IC上叠加一斜坡补偿信号,另一种方法是在采样的电感电流上斜坡叠加补偿信号,这两种方式的原理相同[2]。IC是不叠加斜坡与电感电流比较的误差信号,mc为叠加大斜坡信号的斜率,m1为电感电流上升的斜率,-m2为电感电流下降低斜率。实线三角波形为未加扰动时电感电流,虚线波形为初始时刻存在ΔI0扰动量后电感电流的变化。
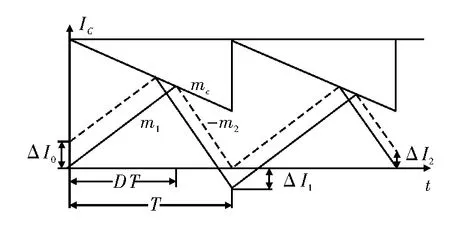
图2 加入斜波补偿后的电感电流波形(D >50 ℅)

同样通过几何计算可知,由初始时刻扰动量ΔI0的下一个周期初始的电流扰动量

则经过n 个周期时间后,ΔI0引起的电流扰动变化量ΔIn为

在占空比从0 ~1 的范围内,电流环稳定的条件是

在占空比从0 ~1 的范围内,电流环稳定的条件是

结合式(9),叠加斜坡补偿后保证系统稳定的条件是

即要保证系统在不同占空比下始终稳定,则需要使斜坡补偿的斜率至少为电感电流下降斜率的50%以上,即
3 二次斜坡补偿电路设计
二次斜坡补偿电路主要是产生与占空比的平方项相关的电路,使输出电压值与占空比的大小呈二次相关。实际需要设计的电路,如图3 所示。
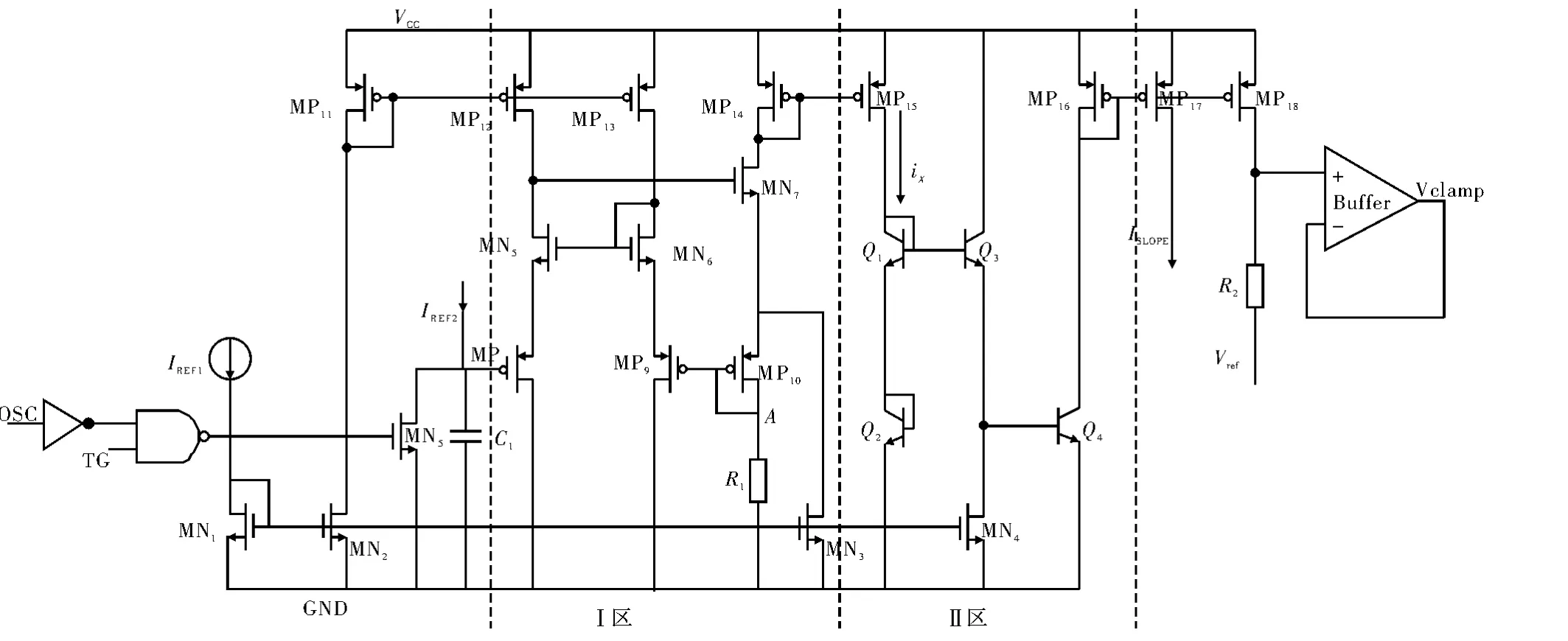
图3 带动态箝位的二次斜坡补偿电路
图3 中OSC 为窄脉冲信号,其上升沿到来后顶端的功率管导通,TG 为顶端功率开关管控制信号,其为高电平时,顶端功率管处于导通状态。MN5为开关管,则当上管导通时,MN5的栅极为低电平,IREF2 给电容C1充电,电容的电压直线上升,当下管关断后,MN5的栅极变为高电平,电容上存储的电量变为0,其电压也为0。中间虚线Ⅰ区部分构成一个电压缓冲器,输入对管MP8和MP9采用P 管可以使输入输出电压低至0 V。A 点电压跟随电容电压的变化。
因此有关系

设MP14和MP15为1∶n 的镜像,MN1和MN3为1∶m的镜像则有

图3 中Ⅱ区为生成二次电路的核心模块,设计中利用了跨导线性环原理,即在一个含有偶数个正偏发射结的闭环回路中,若顺时针方向排列的结的数目与逆时针方向排列的数目相等,则顺时针方向大发射极电流密度之积等于逆时针方向的发射极电流密度之积[5]。基于这个原理设计图3Ⅱ区所示的跨导线性环电路,Q1、Q2、Q3、Q4组成了一个跨导线性环电路,且其发射区面积相等,则其环路方程为

忽略晶体管的基极电流的影响,可得

从而得到

对于跨导线性环电路,三极管发射区面积匹配要求高。在设计时,设计发射极面积之比以及合理的版图布局,可以提高电路的性能,达到预期的效果[6-7]。
假设宽长比MN1:MN4=1∶p;MP16:MP17=1∶q,则可以得到
可得

式中,除了占空比D 以外均为常量,因此可以看出Islope是关于D 的二次函数,合理设计其他值可以得到理想的补偿曲线[8-10]。
3 仿真验证
仿真波形如图4 所示,当功率管导通时,随着导通时间的增长,即占空比D 的增大,Islope电流也逐渐增大;当功率管关断时,即GE 的电压为零,Islope电流将保持为固定值。
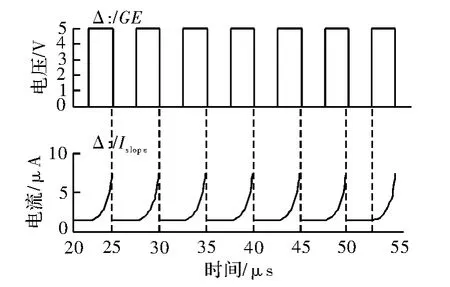
图4 输出斜坡电流随占空比的变化波形
4 结束语
提出了一种应用于电流型DC/DC 转化器的二次斜坡补偿电路的设计,该方法使补偿的斜率随占空比动态变化,不仅提高了芯片的带载能力,也消除了占空比>50%时出现的开环不稳定和亚谐波振荡和对噪声敏感等缺点,同时还避免了系统的过补偿和带载能力降低的问题,由仿真结果表明,系统满足设计要求。
[1] 路秋生.电流型变换器工作原理和斜坡补偿[J].电源技术应用,2001(12):619-620,639.
[2] 徐洋.基于PWM 模式控制的Buck 型DC/DC 芯片的设计[D].西安:西安电子科技大学,2010.
[3] Texas Instruments Incorporated.Modeling analysis and compensation of current-model converter U-97[M].USA:Texas Instruments Incorporated,1999.
[4] Alan B Grebene.Bipolar and MOS analog integrated circuit design[M].New York:John Wiley&Sons Inc,2002.
[5] 陈富吉,来新泉,李玉山.一种自适应斜坡补偿电路的设计与实现[J].半导体学报,2008,29(3):593-597.
[6] TI Conperation.Cancellation of slope compensation effect on current limit unit states patent[M].USA:TI Conperation,2009.
[7] 路秋生,庞宏冰.双环电流控制型PWM 控制电路的斜坡补偿与实现[J].核工业自动化,2001(1):18-23.
[8] 袁冰.高效率大负载高集成电源芯片设计技术研究[D].西安:西安电子科技大学,2009.
[9] 应建华,邹擎天.峰值电流控制中斜坡补偿电路的设计[J].通信电源技术,2007,24(3):47-49.
[10]杨汝.峰值电流控制模式中斜坡补偿电路的设计[J].电力电子技术,2001,35(3):35-38.