一种基于反步法的导弹高度控制器设计*
2015-03-04吴博文李小兵姚春明
吴博文,李小兵,姚春明,曹 艳
(空军工程大学防空反导学院,西安 710051)
一种基于反步法的导弹高度控制器设计*
吴博文,李小兵,姚春明,曹 艳
(空军工程大学防空反导学院,西安 710051)
为提高导弹低空飞行时高度控制系统的性能,根据所建数学模型的特点,设计了一种基于反步法的输出控制器,利用Lyapunov理论对系统的稳定性进行了分析,并通过对导弹纵向通道的数字仿真,验证了控制算法的有效性和系统跟踪指令的精确性。
高度控制,反步法,稳定性分析,仿真
0 引言
作为传统飞行器,导弹是一种非常重要的防空武器系统。实际使用中,当导弹在对付低空或超低空飞行目标时,会受到多种复杂干扰环境的影响,如何精确而快速地对导弹实施高度控制,对于及时躲避地面障碍物,成功完成拦截任务具有重要意义。通常情况下,导弹高度控制系统多属于非线性控制系统,利用传统的PID方法往往难以满足对系统控制性能的要求。反步法作为一种由前向后推的设计方法,以其有效、实现简单的特点而被广泛地应用于多个领域的控制系统设计,特别是对于严格反馈型的非线性不确定系统控制,在控制器设计方面已显示出它的优越性。文献[1]将反步法应用于高超声速飞行器的模糊自适应控制,文献[2]将反步法应用于鲁棒自适应终端滑模控制,文献[3]将反步法应用于PSO(粒子群优化算法)输出控制,都取得了较好的效果。
反步法主要包括状态反馈控制和输出反馈控制。为了提高导弹高度控制系统的性能,这里采用反步法设计了一种输出反馈控制器,并利用构造的Lyapunov函数对控制器的稳定性进行证明。
1 高度控制系统模型
以某型导弹在铅垂平面的运动为例进行研究。这里不考虑风和大气对模型的影响,假定导弹速度为匀速,输入指令为过载ny,建立高度控制系统模型[4]:

式中,g为重力常数,θ为导弹弹道倾角,y为导弹飞行高度,vx、vy分别表示导弹速度在地面坐标系中的分量,不考虑导弹的侧向运动,即vz=0。
2 反步输出控制思想
为使这里的研究结论具有普遍性,本文首先以一类普通系统为研究对象,建立如下的广义非线性系统模型:

式中f1(x1),f2(x1,x2)为非线性函数。
根据反步法原理,设计式(2)的跟踪控制器,使得输出能够以任意小的误差跟踪参考信号yr,其中yr满足其一阶、二阶导数存在且有界的条件。
首先,定义跟踪误差为:

对进行微分,可得

将x2作为z1-子系统的虚拟控制量,选取x2d=x2作为z1-子系统的理想控制输入,同时选择正实函数,则有

至此,可以得出结论:式(2)在式(9)的控制下,闭环系统有界且输出y渐进跟踪参考信号yr。以下对此结论给出证明。
证明:定义函数
3 控制律设计与稳定性分析
对高度系统模型式(1)整理得:

由于系统(14)中导弹弹道倾角在-90°≤θ≤90°变化范围内为严格的一一对应非线性映射(实际弹道倾角的变化远远小于这个范围),若选取以下逆变换

则可将给定的理想高度指令转换成理想的弹道倾角指令,进而设计高度跟踪控制器。即模型可简化为一阶系统:

要使系统渐近稳定,则输入选取为:

4 仿真分析
根据上述分析设计的控制律,利用Matlab/Simulink搭建仿真模型[5],调用S函数编写控制器与目标模型程序,通过不断调节控制律的系数使系统达到最好的稳定状态。图1为搭建的仿真模型图。

图1 仿真模型图
取初始状态 y(0)=0,θ(0)=30π/180m当输入指令信号为yd(t)=2 000 sin(0.1t)m时,仿真结果如图2、图3所示。
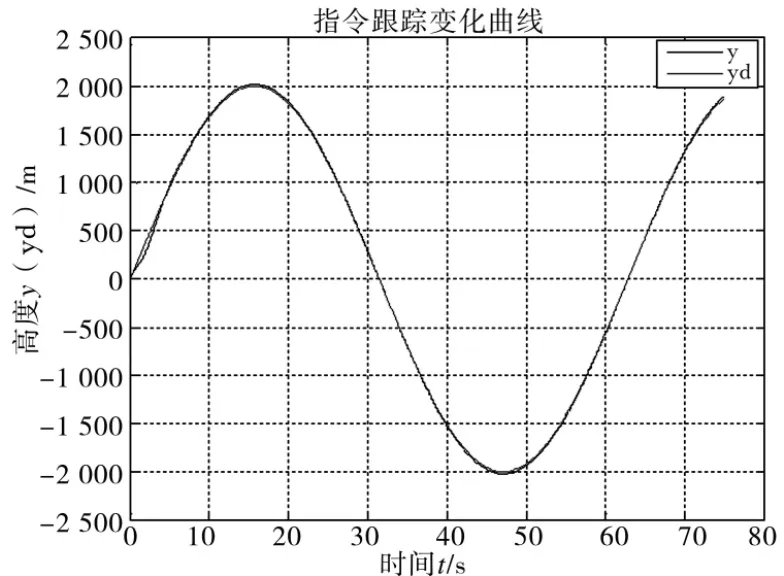
图2 指令跟踪变化曲线

图3 跟踪误差变化曲线
由图2可知,系统可以及时跟踪高度指令信号,并保持系统稳定;但由图3也可看到,当输入指令非线性较强时,其跟踪误差也会变得较大。
值得指出,这里所设计的控制器通常可很好地适合于跟踪低频率的指令信号,而对输入的高频指令信号则效果较差。
5 结论
本文根据导弹高度控制系统模型的结构,利用反步法设计了系统的输出控制器,并对控制器的控制效果进行了仿真验证。通过对输入信号指令仿真结果的分析,发现控制器可以对低频指令信号进行有效跟踪,同时仿真结果也暴露出反步输出控制器的一些局限性。对此问题,可考虑结合其他方法进行算法优化以提高控制的效果。
[1]高道祥,孙增圻,罗熊,等.基于Backstepping的高超声速飞行器模糊自适应控制[J].控制理论与应用,2008,25(5):805-810.
[2]周丽,姜长生,都延丽.一种基于反步法的鲁棒自适应终端滑模控制[J].控制理论与应用,2009,26(6):678-682.
[3]李恩.基于反步法的PSO输出控制[D].哈尔滨:哈尔滨理工大学,2012.
[4]顾文锦,盖玉华,李聪颖.基于滑模变结构的导弹高度控制系统设计[J].航天控制,2009,27(1):57-60.
[5]张德峰.MATLAB/Simulink建模与仿真实例精讲[M].北京:机械工业出版社,2010:129-149.
A Controller Design Based on Backstepping for Altitude System ofM issile
WUBo-wen,LIXiao-bing,YAOChun-ming,CAOYan
(School of Air and Missile Defense,Air Force Engineering University,Xi’an 710051,China)
An output controller based on backstepping is designed in this paper to improve the capacity of altitude control system during the missle’s low altitude flight.The control method is proposed on the characteristics of the missile altitude model,using Lyapunov theory to guarantee the system stability.The longitudinalmodel ofmissile is used in the simulation.Simulation results show the expected efficiency and tracking accuracy of the strategy.
altitude control,backstepping,stability analysis,simulation
TJ765
A
1002-0640(2015)11-0153-03
2014-10-09
2014-11-07
航空科学基金资助项目(20130196004)
吴博文(1991- ),男,河北晋州人,硕士研究生。研究方向:控制科学与工程。