等速无冲击直线往复运动机构研究
2015-03-02
(北华大学工程训练中心,吉林吉林132021)
目前往复运动机构的形式主要有凸轮机构、正弦机构、曲柄滑块机构和不完全齿轮机构等[1].凸轮机构结构复杂,而且行程有限;正弦机构速度波动大,传动路线长,易产生较大的误差累计;曲柄滑块机构往复行程不对称,惯性力难以消除,不适宜高速运动[2-3].为此,本文采用不完全齿轮和齿条研制了一种等速直线往复运动机构,在齿轮上添加附加板以减小齿轮与齿条的冲击[4-5].通过实验和仿真验证了附加板可以有效减小机构的运动冲击,为等速直线往复机构的实现提供了一种有效、可靠的方式.
1 等速无冲击直线往复运动机构组成及其工作原理
等速直线无冲击直线往复运动机构由驱动单元、支承单元、输出单元以及附加单元组成,如图1所示.支撑单元对整体装置起支撑固定作用,并对输出单元进行导向;传动单元采恒转速的不完全齿轮驱动;输出单元是一个平行相对设置的齿条;附加单元为加速附加板.
通过不完全齿轮与齿条的啮合运动将电机的旋转运动转化为齿条的直线往复运动.电机驱动不完全齿轮旋转,当不完全齿轮分别与上下齿条啮合时,实现机构的往复运动.利用加速附加板使齿条与齿轮同步运动在啮合前达到相同速度,以减少由于啮合时速度突变产生的冲击.

图1 直线往复运动机构
1.1 不完全齿轮和齿条设计
等速直线往复运动机构的行程由机构直线运动的时间决定.由等速直线往复运动机构的行程可知,齿轮和齿条间啮合的齿数.齿轮与齿条啮合关系,如图2所示.由图2所示齿轮与齿条啮合关系可知,啮合齿数n为
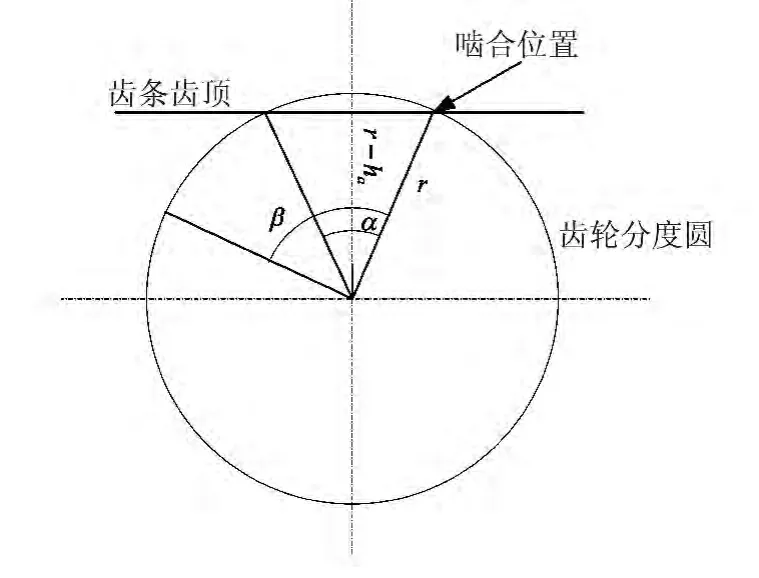
图2 齿轮与齿条啮合关系

式中:β为齿轮与齿条啮合区间角度;α为齿轮首齿与齿条的啮合角度;w为齿轮的角速度;r为齿轮分度圆;ha为齿条齿顶高.
从动件的上下齿条交错排列,分别向右和向左移动一个加速距离.
1.2 加速附加板的设计
加速附加板采用正弦加速度运动规律,通过与挡块接触驱动齿条与不完全齿轮同步运动,以减少齿轮与齿条柔性冲击.利用ADAMS仿真,获得挡块相对齿轮的运动轨迹从而附加板加速和减速曲线,见图3.

图3 ADAMS获得的加速附加板曲线
从动件的运动规律[6]为

式中:h为从动件最大位移;δ0为从动件运动时间.
将ADAMS仿真得到的附加板曲线数据导入MATLAB绘制附加板曲线,如图4所示.

图4 附加板曲线
2 直线往复运动机构ADAMS仿真
等速直线往复运动机构仿真条件如表1所示.机构总运行时间为60 s,加速和减速时间均为1 s.
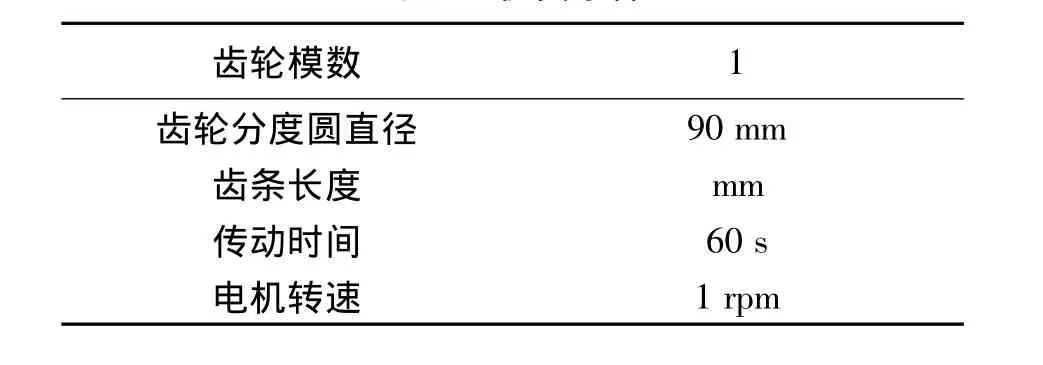
表1 仿真条件
在ADAMS虚拟环境下构建样机进行仿真,添加加速附加板后从动件齿条的运动规律,如图5所示.由图5中可见,齿条传动过程中过渡平滑、冲击小和匀速往复.

图5 齿条的运动规律
在不完全齿轮与齿条间添加接触约束,分别对使用加速附加板前后的接触力进行测量,如图6所示.从图6中可以看到,contact_1为添加加速附加板前,齿条静止时,不完全齿轮撞击齿条的接触力曲线.contact_2为添加加速附加板后,齿条由静止位置加速到接触点时,不完全齿轮撞击齿条的接触力曲线.通过对比可知,添加加速附加板后不完全齿轮与齿条的冲击明显减小.
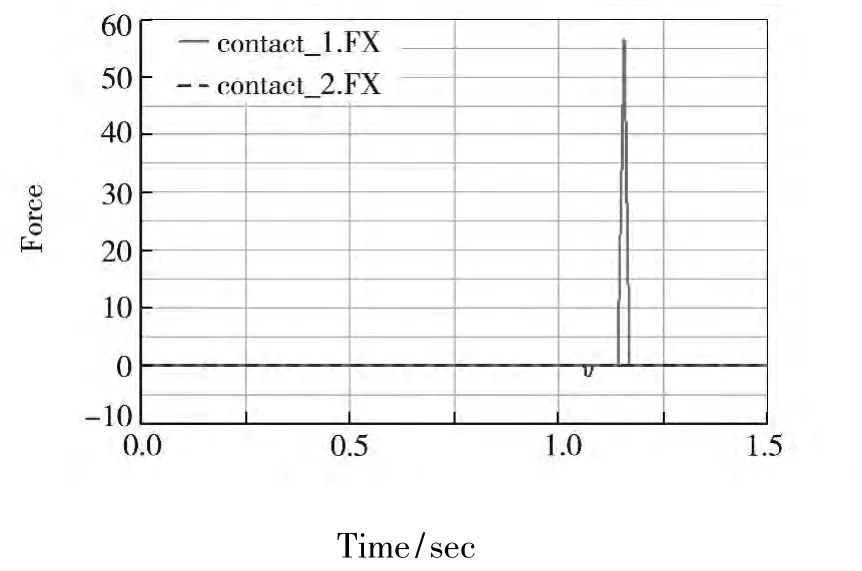
图6 齿轮与齿条的接触力ADAMS仿真
3 结 论
本文采用齿轮和齿条传动研制了一套直线往复运动机构,利用加速附加板有效减小齿轮和齿条的啮合时的冲击.通过ADAMS仿真和样机实验,证明该机构可以实现等速直线往复运动,传动过程中过渡平滑、冲击小.
[1] 王明娣,钟康民.对称双偏心轮驱动的高频小负载往复直线运动机构[J].机械设计,2009,26(7):37-39.
[2] 孙善志,杨成顺,王洪书.实现长行程往复运动的组合机构[J].农业机械学报,1994,25(6):88-92.
[3] 王猛,李长春.不完全齿轮自动换向机构的运动分析[J].机械传动,2012,36(6):71-73.
[4] 高洪,李绍成.基于willis定理的瞬心线附加板共轭曲线设计的新思路[J].安徽机电学院学报,2002,17(1):7-10.
[5] 吴序堂.齿轮啮合原理[M].北京:机械工业出版社,1982.
[6] 孙恒,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2007.