非晶带GMI效应闭环弱磁场传感器
2015-02-21鲍丙豪江苏信息职业技术学院江苏无锡14153江苏大学江苏镇江1013
蒋 峰,鲍丙豪(1.江苏信息职业技术学院,江苏无锡14153; .江苏大学,江苏镇江1013)
非晶带GMI效应闭环弱磁场传感器
蒋峰1*,鲍丙豪2
(1.江苏信息职业技术学院,江苏无锡214153; 2.江苏大学,江苏镇江212013)
摘要:利用脉冲电流退火处理后的Co66.3Fe3.7Si12B18非晶带作为敏感元件,研制出一种基于非晶带GMI效应的闭环磁场传感器。分析了传感器的工作原理,设计了传感器的信号处理以及负反馈电路,并对传感器性能进行了测试。闭环传感器在线性量程为±260 A/m范围内,线性度提高为0.49%。传感器可应用于地球磁场、环境磁场等微弱磁场检测领域。
关键词:弱磁场传感器; GMI效应;闭环;非晶带
1992年,日本科学家毛利等人在零或负磁致伸缩系数的钴基非晶丝中发现,当材料中通入较高频率电流时,其两端的阻抗随外加直流磁场而发生显著变化,即巨磁阻抗Giant Magneto-Impedance(GMI)效应[1]。该效应一经发现,便引起了各国专家的广泛研究兴趣[2-5]。关于GMI效应的本质目前还有待进一步揭示,但利用GMI效应制成的传感器具有高灵敏度、微尺寸和快速响应等优点,在磁传感器、磁敏开关、高密度磁记录头、自动控制系统等方面具有广阔的应用前景。国外已有一些基于GMI效应在磁传感器、电流传感器以及磁编码器等领域应用的文献报道[6-9]。国内目前对GMI效应的研究主要集中在材料研究方面,利用GMI效应研制传感器还处于初步阶段[10-13]。
结合近年来对GMI效应及传感器的研究,开发一种基于非晶带GMI效应的闭环弱磁传感器。在开环传感器的基础上,通过设计电压电流转换电路组成闭环系统,削弱了前向环节对传感器精度和稳定性的影响,提高了传感器的性能。
1 非晶带GMI效应
非晶带采用单辊自由喷射甩出方法制成,在制备过程中由于复杂内应力、气隙和非磁性掺杂物的影响,使其在通常情况下没有明显的GMI效应。因此,将非晶带在电流密度为95 A/mm2、宽度0.8 s、频率1 Hz的脉冲电流下退火处理50 s,去除复杂内应力的同时,在材料内部感生横向的各向异性,以提高材料的GMI效应。实验采用长25 mm、宽1.5 mm、厚34 μm磁致伸缩系数为零的Co66.3Fe3.7Si12B18非晶带作为敏感元件。
GMI变化率定义为
:

其中Z(0),Z(H)分别表示外磁场为零和H下非晶带的阻抗值。V(0),V(H)分别表示外磁场为零和H下非晶带两端的电压幅值。
在非晶带两端制作出电极及引线,测量时采用四端点法连接。通过检测非晶带两端的电压值V,从而得到阻抗值。激励电流由YB1052高频信号发生器产生,并沿着非晶带长度方向。外加磁场由亥姆霍兹线圈提供,沿非晶带长度方向,并与地磁场垂直。图1为非晶带在激励电流频率为55 kHz、500 kHz、1 MHz、2 MHz、5 MHz和20 MHz,激励电流幅值为10 mA下,GMI(Z)随外加磁场的变化曲线。
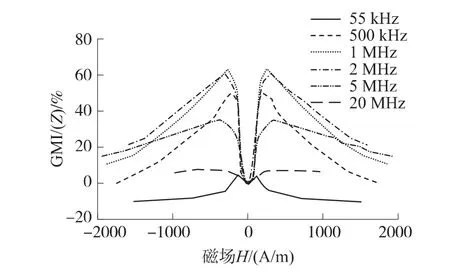
图1 阻抗变化率随外加磁场的变化关系
由图可知,随磁场的增加,GMI(Z)首先增大,形成一个峰值,然后随磁场进一步增加而减小,反方向增加磁场时也会发生类似的变化情况,即出现了典型的对称双峰行为。类似于非晶丝,此峰值现象与横向磁各向异性的存在有关。当直流磁场小于横向磁各向异性场时,材料的磁化由畴壁位移控制,这时若磁场沿着纵向(平行于非晶带的长度方向)增大时,所有的磁畴都逐渐转向纵向,使横向磁导率增大,因此阻抗Z也就随之增大。当外加磁场与横向各向异性场达到平衡时,磁导率最大,则阻抗也达到最大值。当H进一步增大时,磁化过程就由磁化转动(磁畴转动)来控制,此时磁畴由易磁化方向转动到与外磁场一致的方向,因此磁导率和阻抗Z就降低到一个很低的常量。所以,外加磁场在纵向由-H变到+H时,阻抗与磁场的关系曲线就会出现实验中所观察到的两个峰值(GMI双峰行为)。此峰值现象就发生在直流磁场等于横向磁各向异性场的附近。
在不同频率下,GMI(Z)随外磁场的变化曲线有很大的差异,说明激励电流频率对GMI效应有较大的影响。为了得到最佳GMI效应,在传感器设计中,选用1 MHz作为敏感元件激励电流频率。
2 闭环传感器结构设计与特性分析
2.1闭环传感器结构设计
非晶带表面绕上一组激励线圈,线圈的一头接入信号发生电路,另一头接非晶带的一端。信号发生电路产生高频信号对非晶带进行激励。当外加磁场H作用于非晶带时,通过改变非晶带阻抗,使非晶带两端的电压发生变化。电压经前置放大后,由检波电路检测其峰值大小,再经过滤波电路实现平滑处理,并与基准电压实现差分运算。差分电路输出的信号经V/I转换电路后,使电压信号转换为电流信号,再将该电流送入反馈线圈,反馈电路中加入一个取样电阻Rf,传感器输出从电阻Rf中得到。由于反馈线圈产生的磁场Hf与被测磁场H方向相反,即削弱了磁芯中的磁场。若V/I转换系数很大,可使磁芯工作于零磁场附近,这样大大提高磁场的检测范围。同时为了避免起始的非线性区域,在非晶带表面套上一细长螺线管,产生一平行于非晶带轴向的偏置磁场。通过调节偏置磁场大小,使其固定在线性区域的中间位置。这时再通过调节差分运算电路,使被测磁场为零时,传感器的输出为零。闭环传感器结构如图2所示。

图2 闭环传感器结构原理图
2.2闭环传感器特性分析
如图2所示,反馈电流If在反馈线圈中产生的磁场近似为

其中n为非晶带单位长度上的线圈匝数,则有:

将式(2)代入式(3),得

闭环传感器输出电压

式中K为磁电转换系数,G1为开环增益,G为电压电流转换系数。
由以上分析可知闭环传感器具有以下特点:
(1)精度高,稳定性好
由于闭环传感器的灵敏度与前向环节无关,因此前向环节增益的波动不影响闭环传感器的精度和稳定性。传感器的精度和稳定性主要取决于反馈回路的精度和稳定性。
(2)线性度好,量程大
由于相对零位偏差小,所以反馈回路的非线性影响也小,量程就可增大。
(3)动态性能好
由控制理论可知,电路中采用校正网络用纯电的方法调节传感器的等效阻尼和固有频率,使闭环传感器的阻尼比达到一个最佳值,可获得较宽的工作频带和较理想的动态特性。
当系统的闭环增益足够高时,传感器输出电压取决于反馈回路,并与被测磁场呈线性关系,而不受外界因素的影响。因此引入负反馈后,传感器的非线性误差、线性量程、温度稳定性等性能指标得到改善。
3 传感器信号处理及反馈电路设计
3.1激励信号发生电路
激励信号发生电路的设计采用美国美信公司开发的新一代信号发生集成芯片MAX038,它克服了早期用于信号发生的单片集成芯片精度不高,频率上限只有300 kHz,无法产生更高频率的信号,且调节方式不够灵活的缺点。MAX038频率范围从0.1 Hz~20 MHz,最高可达40 MHz。精度高,波形失真小,正弦波失真度小于0.75%。同时,利用MAX038设计的信号发生电路外围电路简单、体积小、性能稳定可靠。本实验采用此电路产生频率为1 MHz,幅值为1 V的正弦信号。
3.2信号处理电路
非晶带两端输出一般为幅值仅有十几毫伏的电压信号,非常微弱,需要一个具有高输入阻抗的前置放大级作为阻抗匹配。本实验设计如图3所示的前置放大电路。该电路由两级放大电路组成,前级放大组成同向比例放大形式,具有高输入阻抗,低输出阻抗的特点。由于非晶带两端输出的信号中含有一负的直流信号,为了后续检波方便,后级放大组成反向比例放大形式,将负的直流信号放大为正的直流信号。
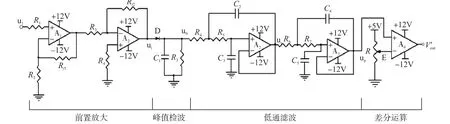
图3 信号处理电路
为了得到反映外加磁场变化的信号,采用如图3所示的二极管峰值包络检波电路,对非晶带输出信号进行解调。它主要由检波二极管及RC低通滤波器组成。该电路具有简单,易于实现等优点。本实验R3和C1的大小确定如下:
二极管采用点接触锗二极管2AP系列,取其正向电阻r=320 Ω,反向电阻rb= 8×105Ω。载波(正弦激励信号)频率f = 1 MHz,调制信号最高频率设为fmax=10 kHz。负载电阻R3越大,检波效率越高。但对于二极管的反向电阻rb,若不满足

则整流效率会变差。
根据式(6),估计出R3的最大值为rb的1/5,即160 kΩ。
另外,在检波达到最前面峰值时,电容C1被充分充电,因此

其中r是二极管的正向电阻,ω为载波角频率。
同时,为了实现良好的保持,时间常数R3C1必须远远大于载波的一个周期。而且为了能够无失真地跟随解调信号的变化,R3C1又必须远远小于调制信号的最高频率ωmax的一个周期,故需满足

即

综合式(7)、式(9),故C1值取62.5 pF左右比较合适。
为提取信号中有用信号,保证通带范围内幅频特性的最佳平坦,设计图3所示压控电压源型四阶巴特沃斯低通滤波器(BLPF)对信号平滑处理。该滤波器的输入阻抗高、输出阻抗低,相当于一个电压源,具有电路性能稳定,增益容易调节等优点。为提高外磁场的动态测量频率范围,又有效地滤除载波及高频干扰信号,将滤波器的截止频率设为10 kHz。同时要求滤波器在高于截止频率时,能够快速地衰减,定义阻带边界频率为24 kHz,此时衰减为30 dB。设C2=10C3=0.01 μF,C4= 2C5= 0.002 μF,经计算,取标称值,得R4、R5、R6、R7分别为10 kΩ、2.4 kΩ、24 kΩ和5 kΩ。
3.3 V/I转换电路
V/I转换电路的设计直接影响着整个闭环传感器的性能。V/I转换电路是将电压转化成电流信号,不仅要求输出电流与输入电压具有线性关系,而且要求输出电流应保持稳定且不随负载的变化而变化,即转换后的电流相当于一个可调的恒流源。图4所示是由运放和阻容等元件组成的V/I转换电路。A1是比较器,A3是电压跟随器,构成负反馈回路。输入电压V'out与反馈电压Vf比较,在比较器A1的输出端得到输出电压V1,V1控制运放A2的输出电压V2,从而改变晶体管T1的输出电流iL,而输出电流iL又影响反馈电压Vf,达到跟踪输入电压V'out的目的。输出电流iL的大小可通过下式计算: iL= V'out/(Rw+R7),当选用器件的性能参数比较稳定,运放A1、A2的放大倍数较大,电路的转换精度可以达到较高的要求。可见,输出电流与输入电压成正比,且与负载电阻RL无关。因此,通过改变Rw、R7可以改变V/I转换电路的转换系数。通过不断改变V/I转换电路的转换系数,得到适当的闭环传感器的反馈深度。当系统的闭环增益足够高时,传感器的输出电压仅取决于反馈回路,且与被测磁场之间呈线性关系,而不受外界因素的影响。
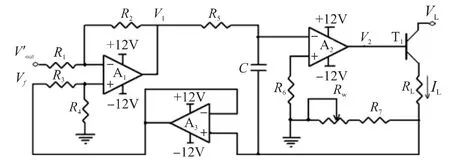
图4 V/I转换电路
将图2差分电路的输出接至图4所示的V/I转换电路的输入端V'out,再将其输出接到图2所示反馈线圈(线圈匝数为260匝)上。闭环传感器的输出信号由与反馈线圈串联的电阻Rf(选用温度系数低的精密金属膜电阻)两端取出,Rf= 47 Ω,即图4中电阻RL等效于图2中的反馈线圈和取样电阻Rf。
4 实验结果与分析
采用亥姆霍兹线圈作为标定工具对传感器进行检定。传感器放置在亥姆霍兹线圈的中心位置,注意磁场方向应与地磁场垂直。将亥姆霍兹线圈接入稳压电源,产生直流磁场,磁场大小由下列公式计算得到:
其中N、R、I分别代表亥姆霍兹线圈匝数、半径以及通入电流大小。通过改变通入亥姆霍兹线圈电流大小,记录下此时传感器输出电压,电压值由数字万用表读出。
根据预先测得的输出电压与外加磁场之间的关系,将开环传感器的测量范围设定为128 A/m~208 A/m。通过调节流过亥姆霍兹线圈的电流,使其在0.08 A~0.13 A之间变化,即外加磁场在128 A/m~208 A/m之间变化,记录此时传感器的输出值。为了同时测量传感器的迟滞性,外加磁场由小逐渐增大,然后由大逐渐减小,并重复测量多次。部分实验结果如表1所示。采用最佳直线拟合方法得到拟合方程为: Y=-0.329+0.022X(V)。经计算,传感器灵敏度K = 0.022 V/A·m-1,线性度δL= 0.844%,重复性δR=2.006%(置信度为99.73%),迟滞δH=0.899%,总精度2.355%。该传感器灵敏度远高于普遍使用的霍尔传感器(一般灵敏度约0.031 25 mV/A·m-1),且其分辨力约为5×10-2A/m(远高于霍尔传感器的分辨力40 A/m),非常适合对微弱磁场的检测。不过由敏感元件和信号处理电路等环节组成的开环系统,传感器测量范围、线性度等不是很理想,需采用反馈控制技术组成闭环系统,进一步提高传感器的精度。
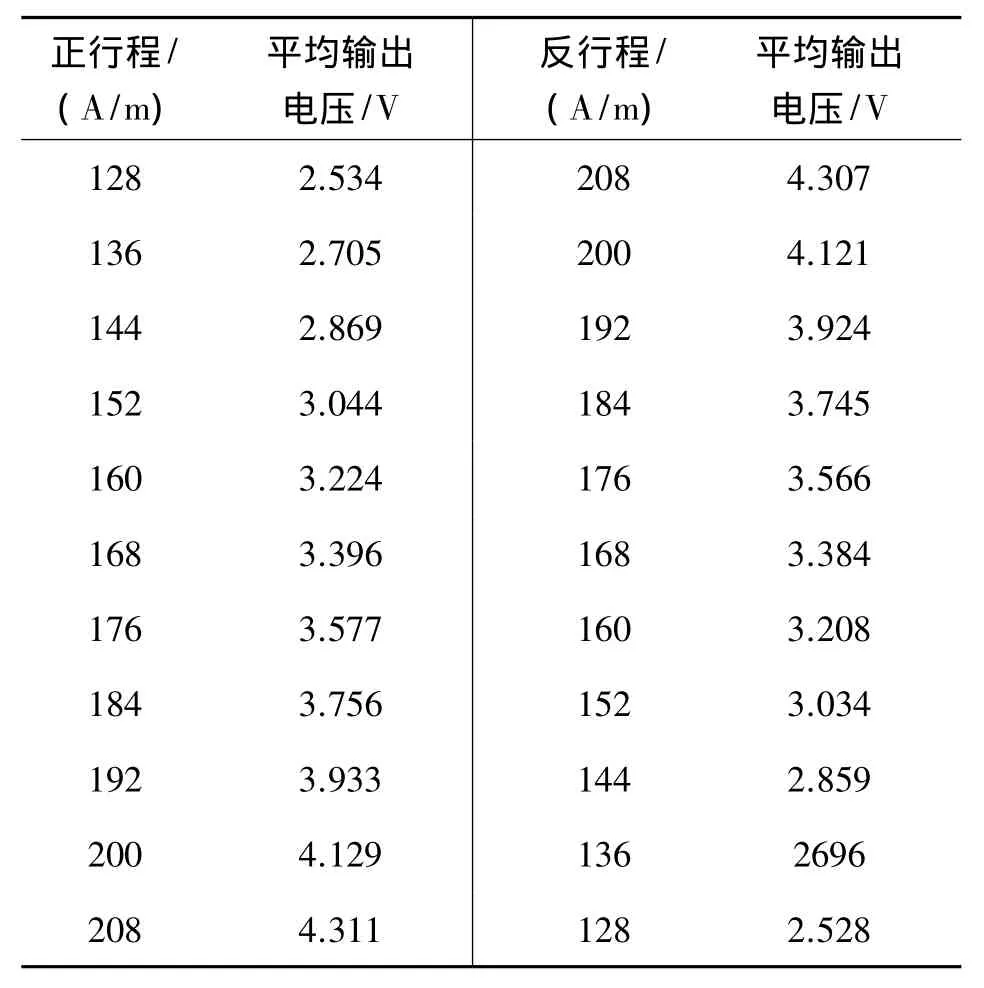
表1 开环测量数据记录表
调节图4所示V/I转换电路中电阻Rw的大小,将该电路的转换系数设定为8 mA/V。同时为了实现正、反两个方向磁场的测量,通过改变偏置线圈内电流的大小来调节非晶带磁芯的工作点。此时,若外加磁场与偏置磁场方向相同,净磁场增加,输出电压值为正;若所加磁场与偏置磁场方向相反,净磁场减小,输出电压值为负。闭环传感器测试结果如表2所示。利用最佳直线拟合方法得到拟合方程为: Y=-0.0023+0.0032X(V)。传感器在线性量程为±260 A/m范围内,线性度为0.49%,满量程输出1.66 V。加了反馈电路后,传感器测量范围明显增大,并且线性度也得到提高。实验还发现闭环传感器的稳定性和开环相比,也得到了明显改善。

表2 闭环测量数据记录表
5 结束语
利用退火处理后的非晶带作为敏感元件,在对传感器工作原理分析的基础上,增加负反馈电路,研制出一种基于非晶带GMI效应的闭环磁场传感器。通过实验对传感器进行了测试,利用负反馈技术提高了传感器的测量范围和精度。
参考文献:
[1]Mohri K,Kohzawa T,Kawashima K,et al.Magneto-Inductive Effect (MI Effect) in Amorphous Wires[J].IEEE Transaction on Magnetics,1992,28(5) : 3150-3152.
[2]Nicholas L,Anurag C,Phan M H,et al.Enhanced Giant Magneto-Impedance Effect and Field Sensitivity in Co-Coated Soft Ferromagnetic Amorphous Ribbons[J].Journal of Applied Physics,2011,109(7) : 07C706-07C706-3.
[3]Taysiolu A A,Kayas Y,Peksoz A,et al.Giant Magneto-Impedance Effect in Thin Zinc Oxide Coated on Co-Based(2705X) Amorphous Ribbons[J].IEEE Transactions on Magnetics,2010,46(2) : 405-407.
[4]Dong C,Chen S,Hsu T Y.A Modified Model of GMI Effect in A-morphous Films With Transverse Magnetic Anisotropy[J].Journal of Magnetism and Magnetic Materials,2003,263(1-2) : 78-82.
[5]Pirota K R,Knobel M,Gomez-polo C.Recent Experiments and Models on Giant Magneto-Impedance[J].Physica B: Condensed Matter,2002,320(1-4) : 127-134.
[6]Chiriac H,Tibu M,Moga A E,et al.Magnetic GMI Sensor for Detection of Biomolecules[J].Journal of Magnetism and Magnetic Materials,2005,293(1) : 671-676.
[7]Kurlyandskaya G,Levit V.Magnetic Dynabeads Detection by Sensitive Element Based on Giant Magneto-Impedance[J].Sensors and Actuators A,2005,20(8) : 1611-1616.
[8]Kudo T,Tsuji N,Asada T,et al.Development of A Small and Wide-Range Three-Phase Current Sensor Using An MI Element [J].IEEE Transaction on Magnetics,2006,42(10) : 3362-3364.
[9]Yu G L,Bu X Z,Xiang C,et al.Design of A GMI Magnetic Sensor Based on The Longitudinal Excitation[J].Sensors and Actuators,2010,161(1-2) : 72-77.
[10]蒋颜玮,房建成,盛蔚,等.软磁非晶丝巨磁阻抗效应传感器研究进展与应用[J].电子器件,2008,31(4) : 1124-1129.
[11]蔡晶,郑金菊,柳渊,等.低温漂巨磁阻抗磁敏开关的设计[J].传感技术学报,2012,25(5) : 577-580.
[12]鲍丙豪,任乃飞,骆英.横向偏置场作用的非晶带巨磁阻抗效应理论[J].物理学报,2011,60(3) : 037503-037503-6.
[13]蒋达国,黄坚革.Fe78Si9B13非晶薄带的巨磁阻抗效应[J].机械工程材料,2011(1) : 43-45.
蒋 峰(1981-),男,汉族,江苏盐城人,讲师,硕士研究生,主要从事功能材料及传感器研究,jf_415@ 126.com。
Design of an Embedded Fingerprint Collecting and Storage Device Based on STM32 and FPC1011F*
LI Duo1,YE Hua1,2*
(1.School of Automation,Southeast University,Nanjing 210096,China; 2.Key Laboratory of Measurement and Control of Complex Systems of Engineering,Ministry of Education,Southeast University,Nanjing 210096,China)
Abstract:According to practical requirements in research of fingerprint recognition algorithm or raw data collection of fingerprint database,the design of an embedded fingerprint collection and storage device is introduced.STM32F103RCT6 is chosen as the microprocessor,which controls the fingerprint sensor FPC1011F through SPI interface to collect fingerprints.Besides,an embedded file system FatFS is ported to STM32 so the collected fingerprints are saved as BMP in SD card,making it easier to browse and process fingerprints directly on computers.What’s more,a friendly GUI is implemented using the touch screen,offering practical management functions such as browse addition and removal of fingerprints.The experimental results verify the low cost,fast collection speed,high image quality,abundant storage capacity and user-friendly GUI of the prototype developed,which satisfies the application needs for fingerprints.
Key words:embedded System; fingerprint collecting and storage; STM32; FPC1011F fingerprint sensor; FatFS file system; SD card
doi:EEACC: 121010.3969/j.issn.1005-9490.2015.02.027
收稿日期:2014-05-07修改日期: 2014-06-06
中图分类号:TP212
文献标识码:A
文章编号:1005-9490(2015) 02-0357-05
