滑模变结构在单片机控制中的应用
2015-02-18徐彬
徐 彬
(沈阳工学院机械与运载学院)
一、滑模变结构理论
1880 年至今,智能控制的发展开始出现在各种控制场合中,但还只是起步阶段。直到1900 年后,才出现了“百花齐放,百家争鸣”的控制方式。滑模变结构具有可以从控制的任何时刻、任何角度参与控制,对控制对象和控制中出现的干扰因素都不灵敏,对系统本身的影响不大等优点,所以在离散系统控制中很受欢迎。从典型的离散系统到连续系统,从一阶、二阶到高阶系统,从限定条件到无限定条件,从普通控制到高级控制,近二十年的时间,滑模变结构控制已经应用到了各种控制中。
趋近律方法是变结构控制的典型策略。我国科学家高为炳首次提出了四种趋近律:等速趋近律、指数趋近律、幂次趋近律和一般趋近律。
1.等速趋近律
系统的控制轨迹到达理想状态,速度都一样,而且幅值的大小都不发生变化,所以系统在受控的过程中,一直是等幅振荡,这样的系统如果控制精度不高,那么这种趋近律完全可以使用。如果控制精度要求比较高的话,这样的趋近律加到控制系统中,会引起控制系统不稳定或不可控。
2.指数趋近律
指数趋近律在诸多控制中使用广泛,主要是因为微分形式经过积分后产生很小的常数项,这个常数项趋近于正无穷小,如果控制系统设计得较好,那么这个常数项就会很小,甚至为0。但是指数趋近律一般应用在控制精度很高的控制系统中,如果有这么一个常数项,会使控制系统不稳定。
3.幂次趋近律
幂次趋近律使用较指数趋近律少,主要是不能在有限的时间内趋向理想状态,这与滑模变结构的控制要求有出入,如果不能在有限的时间内到达,则系统将会一直处于振荡状态,有可能造成系统不稳定。
4.一般趋近律
一般趋近律在四种趋近律中应用得最少,但是控制精度不高、控制步骤不多、不复杂的系统例外。通常是通过组合的思想应用到控制系统中,根据不同的控制要求选择不同的函数进行位置跟踪,位置跟踪是机器人控制中的重要研究方向,主要是轨迹跟踪和壁障。
二、单片机理论
单片机就是在一块硅片上集成了微处理器、存储器以及各种输入输出接口的芯片,这样的一块硅片就具有计算机的特性。常用的控制芯片为intel 公司生产的AT89S52,其内部结构是固化好的,40 个引脚分为四大类,时钟、复位、电源为一类;输入、输出每8 位为一组,通常规定为P 口,分为P0、P1、P2、P3。AT89S52 系列,8—表示芯片为8051 内核芯片,9—表示内部含存储器,S—表示该芯片含有可串行下载功能的存储器,即具有ISP 在线编程功能。1—表示芯片内部程序存储空间的大小,程序空间大小决定了一个芯片所能装入执行代码的多少。一般来说,程序存储空间越大,芯片价格就越高,所以本文中选择的是8KB 的存储空间。这样,一来是为了价格方面的考虑,还有就是内部存储的余量,方便进行程序的扩展。
1.单片机的应用范围
单片机是一种通过写程序来控制的设备,它本身是不能单独运用于某项工程或某种设备上的,必须通过外围的数字电路和模拟电路来实习控制。根据外设的不同,可以把应用分为以下几类:
(1)工业自动化。例如:数据采集、测控技术。
(2)智能仪器仪表。例如:数字示波器、数字信号源、数字万用表等。
(3)消费类电子产品。例如:洗衣机、电冰箱、微波炉、汽车电子产品等。
(4)通信方面。例如:调制解调器、手机、交换机等。
(5)武器。例如:飞机、导弹制导、智能武器等。
2.单片机系统设计中的内容
(1)电源。
(2)晶体振荡器。
(3)复位电路。
(4)输入检测电平。
(5)输出控制电平。
(6)定时器:重点设计定时器方式2。
三、滑模变结构与单片机的结合
单片机不能独立完成控制要求,只能通过外围电路,如数字电路或模拟电路等,除了外围电路外,高级的控制方法也可以实现,比如:滑模变结构控制。那么如何来实现,也就是趋近律控制策略。通过引入趋近律到单片机实现控制。仿真的图像如下:
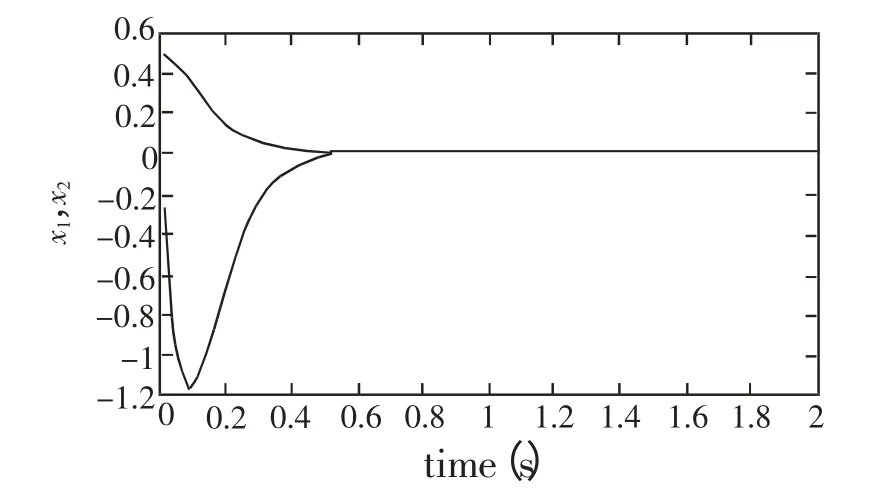
图1 状态定量自线图
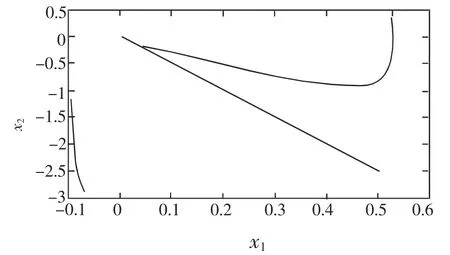
图2 滑模运动相轨迹曲线
本文从选题到最后的仿真结果,都表明滑模变结构应用到单片机实现控制是一个不错的选择,但是从微分方程的计算、化简难度很大,如何选择合适的参数也需要经过不断的仿真才能得出,仿真图形表明,趋近律和曲线拟合下的趋近律在消除抖振方面有很明显的区别,关键在于新趋近律中参数选择有误差,而曲线拟合下的趋近律则采用最小二乘逼近的方法把每一点的误差都过滤掉,表现出很好的动态品质和滑模特性。在轮式小车的路径寻优方面有很好的作用和控制效果。
[1]刘金琨.滑模变结构控制MATLAB 仿真[M].北京:清华大学出版社,2005.
[2]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
