基于相位校正信号的变频系统时延测量方法
2015-02-18焦义文王元钦
焦义文, 王元钦, 姜 坤, 廉 昕, 许 可
(1. 装备学院光电装备系, 北京 101416; 2. 北京跟踪与通信技术研究所, 北京 100094;
3. 中国西安卫星测控中心, 陕西 西安 710043)
基于相位校正信号的变频系统时延测量方法
焦义文1, 王元钦1, 姜坤2, 廉昕1, 许可3
(1. 装备学院光电装备系, 北京 101416; 2. 北京跟踪与通信技术研究所, 北京 100094;
3. 中国西安卫星测控中心, 陕西 西安 710043)
摘要:针对现有群时延测量方法在宽带变频系统测量中,测量效率低、没有有效的群时延解模糊方法的问题,提出了一种基于相位校正(phase calibration,PCAL)信号的高精度时延测量方法和基于扩展中国余数定理(Chinese remainder theorem,CRT)的时延解模糊方法。利用PCAL信号梳状谱的频率特性,通过一次测量即可得到整个测试带宽内不同孔径下的群时延特性。推导了扩展CRT算法稳健的条件,给出了详细的群时延解模糊策略。计算机仿真结果表明,新方法的相对时延测量精度和相对解模糊精度最高可达到ps量级。实际设备测试结果表明,相对时延测量精度达到了0.01 ns量级,CRT相对解模糊精度约为0.1 ns量级。
关键词:群时延; 相位校正信号; 中国余数定理; 时延测量; 解模糊
0引言
时延表示信号通过某一传输系统或网络时,输出信号相对于输入信号的滞后时间。在超宽带通信[1]、卫星导航定位、航天测控、深空探测等领域,射频接收机作为一种典型的变频系统,其时延特性对系统测量精度具有重要影响。一是接收机的时延测量误差将作为系统差影响系统定位精度;二是接收机的时延随频率变化特性将会造成接收信号的线性失真。
由于变频系统的输入和输出频率不同,给变频系统时延测量带来了难度。目前,国内外关于变频系统时延测量方法主要有基于矢量网络分析仪(vector network analyzer,VNA)的静态法和基于载波调制的动态法[2]。
基于VNA的静态法可分为2类。一是使用2个频率变换器件串联,分别做上下变频,使输入和输出同频;二是在并联位置的参考通道上给被测器件产生一个相位参考信号。基于VNA的静态法测量过程复杂,且需要一个互易的参考器件,校准过程繁琐、灵活性差。
基于载波调制的动态法是由包络时延引出的。对于一个窄带系统,当调制信号频率远小于载波频率时,包络时延和群时延是等价的。采用的调制方法有幅度调制(amplitude modulation, AM)、频率调制(frequency modulation, FM)和相位调制(phase modulation, PM)[3-4]。由于FM调制具有较强的抗噪性能,因此较常采用。文献[5]提出了一种基于FM包络时延的群时延测量方法,该方法通过将某一低频侧音调制到载波上,通过附加的调制、解调和相位求取单元测量被测设备(device under test,DUT)的时延。优势在于相位求取单元工作在低频段,相位求取精度可以更高,但在信号经过调制解调后,整个测量系统的相频响应较为复杂,误差分析困难。文献[6]为了提高FM包络时延的测量精度,对2个主要限制因素:测试带宽内的群时延变化和测试设备失配误差,进行了理论分析。指出增大FM信号的调制指数可以有效减小设备之间的失配误差;对于非线性系统,减小FM信号的频率偏移(即群时延的测量孔径),可以减小非线性测量误差,但同时会减弱对噪声的抑制能力。
文献[7]针对变频系统的群时延测量,提出了一种基于软件无线电平台的双频相差法。该方法利用初始相位相同的双频信号同时作用于被测系统,通过测量2个频点的相位差,得到系统的群时延。在孔径为1 kHz条件下,群时延实际测量精度优于15 ns。在该方法中,双频信号的频率差受待测系统群时延限制,否则会出现时延模糊,且该方法一次只能测量一个孔径下的系统群时延。对于宽带变频系统,在相同孔径条件下,需要进行多次重复测量,才能得到整个通带内的群时延特性,测试效率低。
文献[8]提出了一种利用梳状谱发生器进行变频系统群时延测量的新方法。该方法通过一个基频参考信号(cos(ωMt))调制产生梳状谱,作为系统测试信号。将系统输出信号采集记录后,利用平方律解调得到经过待测系统后的基频信号。采用相关法提取调制前后基频信号之间的相位差φM1。改变基频参考信号为cos[(ωM+Δω)t]再次进行测量,得到相位差φM2,则被测变频系统的群时延值为(φM1-φM2)/Δω。由于两次测量参考信号的频率不同,当被测带宽内相频特性为非线性时,会造成中频群时延失真(intermediate frequency group delay distortion,IFGDD)。文章详细讨论了调制频率ωM和系统失配误差对测量结果的影响,指出ωM必须小于被测系统带宽,系统的IFGDD随着ωM的增大而增大。失配误差由被测系统的反射系数决定。
文献[9]针对群时延测量过程中分辨率和测量精度之间的矛盾,提出了一种基于Taylor展开的群时延新定义,将群时延分为一阶线性群时延和高阶非线性群时延。给出了一种基于VNA测量结果,进行3次样条插值和Taylor级数展开的测量方案。对非变频线性器件的相对测量精度为0.01 ns,绝对精度约为0.3 ns。该文的重要贡献在于群时延求取的后处理方法,在测量方法上采用的仍是传统VNA法。
通过对国内外文献的对比发现,现有变频系统群时延测量方法存在两个问题:一是测试方法都是针对窄带系统,一次测量只能得到一个孔径下的群时延。对于宽带变频系统,在相同测量孔径下,需要进行多次测量才能得到整个测试带宽内的群时延特性,测试效率低。二是现有测量过程都是在群时延无模糊的前提下进行的,没有有效的群时延解模糊方法。
针对这两个问题,提出了一种基于相位校正信号的宽带变频系统时延测量方法和基于中国余数定理(Chinese remainder theorem,CRT)的群时延解模糊方案。与现有方法相比,该方法通过一次测量即可得到整个测试带宽内的相频特性,根据被测设备线性特性,对不同孔径下的相频特性进行最小二乘拟合,即可得到被测带宽内不同孔径下的群时延特性,测量效率高。
1相时延和群时延
相时延表示单频信号经过系统传输,系统输出信号对输入信号的滞后时间,是该频率信号的相移与角频率之比,数学表达式为
(1)
群时延是指群信号经过线性系统或网络传播时,系统或网络对信号整体产生的时延,数学表达式为
(2)
对于图1所示的多级变频系统,τ1为第1级下变频前系统时延值,fLO1为第1级本振频率;τ2为第2级下变频前系统时延值,fLO2为第2级本振频率;τ3为第2级下变频后系统时延值。

图1 多级下变频系统示意图
不失一般性,以2个点频为例,设
(3)
式中,f0、f1为测试信号频率;φ0、φ1为信号初相。经过系统后,计算得到的输出信号相位为
(4)
式中,σ2为相位提取方差。由相时延和群时延定义可知,测试信号经过图1所示变频系统后,求得的相时延为
(5)
群时延为
(6)
由式(5)可知,相时延能够准确表征系统变频前的时延值(τ1),却不能准确表征整个变频系统的绝对时延值(τ1+τ2+τ3)。对于变频系统而言,相时延相当于对变频后的时延值进行了加权,各级权值大小由各级本振频率和信号频率之比决定。由式(6)可知,群时延能够准确表征非变频系统和变频系统的绝对时延值。由式(6)的第4项可知,在计算系统群时延时,不仅需要知道信号经过系统后的相位差、频率差,还需要知道信号的初相差,从而对测试信号的设计提出了特殊要求,否则,当信号初相不为零时,求取的群时延会存在偏差。
2测试方案
2.1测试信号选择
相位校正(phasecalibration,PCAL)信号是由本地参考信号激发阶跃二极管(或隧道二极管)而产生的周期性窄脉冲[10],对于周期脉冲信号

(7)
式中,A为脉冲幅度;τ为脉宽;T为脉冲周期。x(t)在一个周期内的能量是有限的,满足Dirichlet条件,将其展成傅里叶级数
(8)

(9)
可得周期性脉冲信号的傅里叶变换为
(10)
由式(10)可知,PCAL信号的频谱是一系列等间隔的梳状谱线,谱线间隔f0=1/T,频谱覆盖范围为f=1/τ。信号频谱中相邻频点间的初相差恒为-πf0τ。对于脉宽为20ps的PCAL信号而言,其梳状谱频率覆盖范围可达50GHz,可实现对S频段(2~4GHz)、C频段(4~8GHz)、X频段(8~12GHz)和Ka频段(26.5~40GHz)接收机时延特性的测量。
2.2测试框图
基于PCAL信号的变频系统时延测量框图如图2所示。

图2 测试系统框图
整个测试系统主要由4部分组成:PCAL信号发生器、信号采集卡、原子钟和数据处理单元。PCAL信号发生器既可以使用专用信号发生器[11-12],也可以使用商用的安捷伦U9391C/F/G梳状谱发生器(comb generators)[13]。信号采集单元为可选设备。若DUT为纯模拟设备,则需要信号采集单元对DUT的输出信号进行采集。若DUT为模拟、数字混合设备,自身就包含有数据采集模块,如数字化接收机,则无需信号采集单元。为了实现高精度测量,必须保证PCAL信号发生器和信号采集单元与1 pps具有固定的相位关系,并且要保证PCAL信号发生器、DUT和信号采集单元共源。数据处理单元负责提取DUT被测带宽内各个梳状谱的相位,得到测量带宽内的相频特性,并对提取的相位进行多项式拟合,得到线性时延和非线性时延值。
2.3基于DFT的梳状谱信号相位提取
当前,大部分变频系统时延测量方案在点频信号相位提取方面采用的都是相关法[4-5,7]。相关法的优点在于不需要知道DUT的本振信息,缺点在于需要对参考信号和DUT输出信号同时进行采样处理,且计算量随着提取频点个数的增加而增长。本节根据PCAL信号的特点,提出了一种基于DFT的PCAL多频点相位高效提取方法,其信号处理示意图如图3所示。

图3 测试信号处理示意图
由于PCAL信号的周期一旦确定,其各频点的频率值就是确定的。通常被测变频系统的下变频频率也是已知的。因此可以根据窄脉冲的脉冲重复频率(pulse repetition frequency,PRF)f0和被测变频系统的本振频率fLO直接计算出被测带宽内各梳状谱频点的频率值pf0~qf0。图3中第1幅图表示产生的PCAL信号。第2幅图示意DUT的本振频率。第3幅图表示经过DUT后的输出信号,其包络反映了DUT通带内的幅频特性。第4幅图表示在数据处理时,将输出信号变为零中频,降低采样速率。第5幅图表示通过DFT求取的DUT通带相频特性,通过对DUT相频特性的最小二乘拟合,即可得到DUT的群时延。
由文献[10]可知,PCAL信号梳状谱越密集,PCAL各频点的信噪比越低,进而相位提取精度就越差,可以利用PCAL信号的周期性以及噪声的不相关性,通过对信号进行分段累加(增加积分时间)的方法,提高PCAL信号梳状谱密集条件下的相位提取精度。
在实际测试时,首先根据梳状谱信号信噪比大小对采集的N点测试信号x(n)进行分段累加。分段数据长度应满足以下条件:保证梳状谱频率间隔f0为DFT频率分辨率的整数倍,以避免频谱泄露。从而分段数据长度L=MFs/f0,Fs为信号采样频率,f0为窄脉冲信号的PRF,M为整数,则分段累加后的数据为
(11)
根据测试信号中第一个梳状谱频点距离零中频的频率偏移foffset=pf0,将梳状谱各个频点移至DFT频率分辨率的整数倍处,则
(12)
对累加后的数据做DFT,得
(13)
从而可得梳状谱各频点的相位为
(14)
式中,K为测试信号中包含的梳状谱信号频点个数。由式(14)可知,该方法通过一次DFT运算就可以得到DUT测量带宽内所有梳状谱频点的相位值,通过相邻相位值的差分,即可得到带内各频点的群时延。该时延值的均值可等效为整个测试带宽内的时延值。由文献[14]可知,在梳状谱信号相位提取方面,新方法与相关法相比:相位提取精度相同、计算效率高。
2.4基于CRT的时延解模糊
现有群时延测量方法都是在已知DUT群时延预测值的条件下,通过对群时延测量孔径进行限制,从而避免时延模糊的产生。然而,在某些复杂情况下,DUT的群时延预测值是无法或难以获取的。为此,提出了一种基于扩展CRT的DUT时延解模糊方法。
2.4.1扩展CRT
在利用单一频率间隔的PCAL信号测量DUT时延时,受到PCAL信号周期的限制,其能测量的最大无模糊时延为PCAL信号的周期。当DUT时延大于其周期时,测得的时延含有模糊,必须求解出模糊数,才能得到真实时延。传统CRT能够利用一组两两互质的模数及相应余数来估计一个整数[15]。这里的整数相当于DUT的无模糊时延,质数相当于PCAL的周期,余数相当于测量得到的有模糊时延。根据这一映射关系,可以由不同窄脉冲周期下的有模糊时延,求解DUT的实际时延。传统CRT对模数互质的要求限制了其应用范围,扩展CRT在传统CRT的基础上,将其应用范围扩展到非互质的模数。

(15)
式中
(16)
(17)
Qi=M/Li
(18)
(19)
(20)
ri=mi-biC
(21)

2.4.2扩展CRT误差分析
CRT存在一个重要的问题是算法不稳健。由式(16)可知,由于δi≫1,从而导致bi的极小误差就可能引起被估整数相当大的误差。文献[17]通过推导证明,式(16)中的加权系数δi的性质为
(22)
当bi的误差Δbi相同时,可得x0的估计误差为
(23)
从而减小了估计误差的灵敏度。文献[15]在推导Δbi相同的条件时考虑不全面,本文对该问题进行了重新分析。设余数mi的测量误差为Δmi,即mi=mi0+Δmi,则由式(19)和式(21)可得
(24)
为了保证Δbi相同,需满足
(25)
此时,被估整数x的估计误差为
(26)
式中,Δm1为第一个余数的测量误差。
为了验证扩展CRT算法及误差分析的正确性,进行如下仿真。设DUT的真实时延为800ns,梳状谱信号1的频率间隔为4MHz,对应的无模糊时延为250ns(模数1),时延测量值为50ns(余数1)。梳状谱信号2的频率间隔为5MHz,对应的无模糊时延为200ns(模数2),时延测量值为0ns(余数2)。可知,模数1和模数2非互质。设余数1、2的测量误差为0~80ns,步进1ns,量化单位为1ns。按照扩展CRT分别利用有模糊的时延值求取DUT无模糊时延,仿真结果如图4所示。经计算,模数1和模数2的最大公约数C=50,没有误差时的公共余数ri=0(i=1,2)。由式(25)可知,当2个余数的误差均在[0ns50ns]及[50ns80ns]时(见图4中的红色区域),两者具有相同的误差Δbi(i=1,2)。此时CRT估计结果的误差灵敏度大大降低,其误差仅由余数测量误差的均值决定,估计结果误差较小。当2个余数的测量误差不满足式(25)时(见图4中黄色和蓝色区域),由于δi的作用,余数测量误差被加权放大,造成较大的估计误差。

图4 CRT估计误差与余数测量误差关系
2.4.3基于扩展CRT的时延解模糊方法
根据扩展CRT,可将时延解模糊方法总结如下:
步骤 1根据被测系统带宽B,分别将PCAL发生器输出信号周期设为T0、T1(对应梳状谱频率间隔为f0、f1),在2种频率间隔下对DUT的时延进行测量,得到线性群时延值τ0,τ1和测量误差δτ0,δτ1。设集合A∈[τ0-3δτ0,τ0+3δτ0],集合B∈[τ1-3δτ1,τ1+3δτ1],若A∩B≠∅,则说明测量得到的时延值没有模糊,否则需要进行解模糊。为了保证时延求取精度,T0,T1的选择应确保被测带宽内至少包含3个梳状谱频点,同时尽量使T0,T1具有较大的最小公倍数,从而在解模糊时具有较大的无模糊时延。
步骤 2设量化单位为u,对各参数进行量化,得到量化后的模数Li=round(Ti/u),余数mi=round(τi/u),余数测量误差Δmi=round(Δτi/u)。
步骤 3按照式(15)~式(21)计算x,最终求得的时延为
(27)
步骤 4设置PCAL发生器输出信号周期T2>τg,对DUT时延进行再次测量,得到线性群时延值τ2和测量误差δτ2,若τg∈[τ2-3δτ2,τ2+3δτ2],则说明解模糊正确,否则,说明还存在模糊,利用已经测得的多个模糊时延按照步骤2及步骤3的方法继续解模糊,直到解模糊正确为止。
3仿真验证
为了验证本文所提时延测量方法的正确性,以图5所示基于软件无线电的数字化射频接收机为例进行仿真验证。

图5 软件无线电数字化射频接收机
射频信号首先经过抗混叠滤波,抗混叠滤波器的通带范围为0~510MHz。以1 024MSps的采样率对射频信号进行数字化采样。采样后的信号首先经过第一级下变频和低通滤波LPF1。LPF1的通带截止频率为24MHz,阻带截止频率为32MHz,滤波器阶数为438阶。对滤波后的信号进行16倍抽取,将采样率降为64MHz。对降频后信号进行第二级下变频及低通滤波,得到最终的基带输出信号。LPF2的通带截止频率为14.5MHz,阻带截止频率为16MHz,滤波器阶数为146阶。为了方便验证,仿真时扣除数字滤波器LPF1和LPF2以外的所有时延值。由数字滤波器群时延与滤波器阶数M和采样频率Fs的关系
(28)
可知,整个仿真系统理论上的时延真值应为
(29)
在PCAL信号频率间隔为100kHz,信噪比为0~50dB,步进2dB条件下,分别进行100次蒙特卡罗仿真,得到变频系统时延估计误差均值随梳状谱信号信噪比的变化关系如图6所示。时延估计误差定义为时延测量值与时延真值之差。由图6可知,时延估计误差随着SNR的提高而减小,当SNR高于35dB时,时延估计误差可达到ps量级。

图6 PCAL信号不同信噪比下时延测量误差
由于仿真系统的时延约为1 354.5 ns,对应的最大无模糊PCAL信号频率间隔约为738 kHz。为了验证本文所提时延解模糊算法的正确性,分别在不同信噪比下,利用频
率间隔为0.8 MHz和2 MHz的PCAL信号求取仿真系统的模糊时延,并通过扩展CRT进行解模糊。2个PCAL信号对应的最大无模糊时延分别为1 250 ns和500 ns,利用扩展CRT能够求解的最大无模糊时延为2 500 ns。在不同信噪比下,利用PCAL信号测得的仿真系统时延及时延标准差如表1和表2所示,求得的无模糊时延如表3所示。由仿真结果可知,基于PCAL信号的变频系统时延测量及解模糊方法能够准确求取变频系统时延值,计算精度最高可达ps量级。
4测试实验
X频段数字化射频接收机由低噪声放大器(low noise amplifier, LNA)、混频器、模拟滤波器和数字基带转换器[18]组成,是一个典型的模拟数字混合设备。由于不能组成一个模拟闭合环路,无法使用矢量网络分析仪对该设备的群时延进行测量。为此,将该设备当作一个黑匣子,采用本文所提方法进行测试,验证其在实际测量过程中的有效性。实验框图如图7所示。其中原子钟为Symmetricom Datum X72铷钟,可产生10 MHz参考频标和1 pps脉冲。梳状谱信号发生器采用专用设备,窄脉冲脉宽为25 ps,可产生频率间隔为5 MHz/n(n=1,2,…,100)的梳状谱信号。

表1 DUT仿真测量结果(PCAL间隔0.8 MHz)

表2 DUT仿真测量结果(PCAL间隔2 MHz)

表3 时延解模糊结果
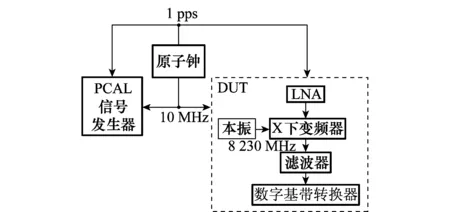
图7 X频段数字化射频接收机群时延测量框图
在待测设备群时延未知的情况下,按照第2.4.3节所述策略进行测量。为了减小非线性误差的影响,设定测试带宽为2 MHz。PCAL信号的信噪比为25 dB,间隔分别为250 kHz和156.25 kHz,对应的最大无模糊时延分别为4 μs和6.4 μs,通过扩展CRT可求取的最大无模糊时延为32 μs。利用PCAL信号实际测量得到的群时延均值分别为2 072.824 6 ns和1 273.026 4 ns,均方根误差为0.035 ns和0.048 ns。由第1次测量结果可知,求取的群时延存在模糊。设量化单位为0.1 ns,利用扩展CRT,根据第1次测量结果求得的无模糊时延为14 073.2 ns。为了验证解模糊的正确性,再次选择PCAL间隔为50 kHz的测试信号(对应的最大无模糊时延为20 μs),进行第2次验证测量。实际测量结果为14 072.226 9 ns,均方根误差为0.059 ns。由第2.4.3节的步骤4可知,解模糊结果正确。对一段时间内的信号进行连续处理,得到CRT解模糊值与实际测量值随时间的变化情况如图8所示。

图8 CRT解模糊值与实际测量值随时间变化情况
将梳状谱间隔为50 kHz时测得的DUT时延值作为真值,得到CRT解模糊误差如图9所示。通过计算可知,CRT解模糊的均方根误差约为0.225 ns。

图9 CRT解模糊误差随时间变化情况
需要说明的是,系统测量误差包括测试设备误差、设备失配误差和测量误差,比如测试设备引入的电缆时延等。由于在测量过程中,未能消除测试设备引入的时延。因此,文中的时延测量精度均为相对测量精度。由于测试设备引入的时延误差通常为固定值,可通过系统校准进行消除,从而得到系统时延的绝对值。
5结论
针对变频系统群时延测量问题,提出了一种基于PCAL信号的测量方法和基于扩展CRT的解模糊方法。新方法通过一次测量能够得到整个测试频带内的群时延特性,测量效率高。通过待测设备的有模糊时延测量值,可以正确求取真实群时延。通过对某一X频段数字化射频接收机的实际测试结果表明,在PCAL信号信噪比为25 dB时,新方法的群时延相对测量精度达到0.01 ns量级,CRT解模糊精度约为0.1 ns量级。
参考文献:
[1] Jin Y N, Kwak K S. A robust non-coherent receiver for TR UWB with the impact of group delay ripple[J].TheInstituteofElectronics,InformationandCommunicationEngineers(IEICE)Trans.onCommunications, 2012, E95B(6):1983-1989.
[2] Di S, Zhang G H, Feng K M. Introduction and analysis of methods of measuring the group delay of frequency-translating devices[J].JournalofAstronauticMetrologyandMeasurement,2007,27(1):1-5.(邸帅,张国华,冯克明.频率变换器件群时延测量方法的探讨与分析[J].宇航计测技术,2007,27(1):1-5.)
[3] Badger D. Low-cost techniques determine group delay[J].MicrowavesandRF, 1985, 24(1): 83-86.
[4] Dennis T, Williams P A. Achieving high absolute accuracy for group-delay measurements using the modulation phase-shift technique[J].JournalofLightwaveTechnology, 2005, 23(11): 3748-3754.
[5] Wardrop B. The measurement of group delay[J].MarconiReview,FourthQuarter, 1972, 35(1): 316-337.
[6] Woods G, Maskell D. Improving group delay measurement accuracy using the FM envelope delay technique[C]∥Proc.oftheIEEERegion10TENCON, 2005: 1-6.
[7] Yu C J, Chen Y Y. Precise method for group delay measurement of frequency-translating devices based on software defined radio technology[J].ChineseJournalofScientificInstrument, 2010, 31(1): 166-171. (于长军, 陈芸芸. 一种基于软件无线电技术的变频系统群时延精确测量方法[J]. 仪器仪表学报, 2010, 31(1): 166-171.)
[8] Scott J, Hoy M. Group-delay measurement of frequency-converting devices using a comb generator[J].IEEETrans.onInstrumentationandMeasurement, 2010, 59(11): 3012-3017.
[9] Zhu X W, Li Y L, Yong S W, et al. A novel definition and measurement method of group delay and its application[J].IEEETrans.onInstrumentationandMeasurement,2009,58(1):229-233.
[10]Jiang K, Wang Y Q, Hou X M, et al. High efficient extraction of phase calibration signals and error analysis[J].JournalofSignalProcessing, 2014, 30(2): 197-204. (姜坤, 王元钦, 侯孝民, 等. 相位校准信号高效提取方法及误差分析[J]. 信号处理, 2014, 30(2): 197-204.)
[11] Li W, Wang J Q, Xue Z H. Principle and design of new phase-calibration unit in VLBI digital backend[J].AnnalsofShanghaiObservatoryAcademiaSinica, 2009(30): 60-70. (李炜, 王锦清, 薛祝和. 新一代VLBI数字终端相位校正单元的原理与设计[J]. 中国科学院上海天文台年刊, 2009(30): 60-70.)
[12] Li Q L, Jiang W S, Xu Y F, et al. Analysis and design of wide-band comb generator based on SRD[C]∥Proc.oftheInternationalConferenceonMicrowaveandMillimeterWaveTechnology, 2012: 1-3.
[13] Agilent Technologies. Agilent U9391C/F/G Comb Generators[EB/OL].[2014-8-6]. http:∥221.179.130.43:83/1Q2W3E4-R5T6Y7U8I9O0P1Z2X3C4V5B/cp.literature.agilent.com/litweb/pdf/5989-7619EN.pdf.
[14] Jiang K, Hou X M, Xu K. High efficiency parallel extraction of multi-tone PCAL signals[J].JournalofSpacecraftTT&CTechnology, 2012, 31(6): 32-36. (姜坤, 侯孝民, 许可, 等. PCAL信号多频点高效并行提取方法[J]. 飞行器测控学报, 2012, 31(6): 32-36.)
[15] Wang W J, Jiang H Y, Xia X G, et al. A wireless secret key generation method based on Chinese remainder theorem in FDD systems[J].ScienceChinaInformationSciences, 2012, 55(7): 1605-1616.
[16] Cheng G H, Qi X M, Luo Y L. Design and implementation of modular inversion circuits in AES algorithm[J].JournalofChineseComputerSystems,2011,32(6):1240-1244.(程桂花,齐学梅,罗永龙.AES算法中模逆运算电路设计与实现[J].小型微型计算机系统,2011,32(6):1240-1244.)
[17] Wang C, Yin Q Y, Chen H Y. Robust Chinese remainder theorem ranging method based on dual-frequency measurements[J].IEEETrans.onVehicularTechnology,2011,60(8):4094-4099.
[18] Jiang K, Jiao Y W, Hou X M, et al. Design and implementation of the deep space interferometry DBBC sub-system[C]∥Proc.ofthe11thIEEEInternationalConferenceonSignalProcessing, 2012: 448-451.
焦义文(1985-),男,博士研究生,主要研究方向为飞行器测量与控制、数字信号处理。
E-mail:jiaoyiwen@gmail.com
王元钦(1963-),男,教授,博士,主要研究方向为航天测控、数字信号处理。
E-mail:jerry_mickey@sina.com
姜坤(1984-),男,工程师,博士,主要研究方向为航天测控、数字信号处理。
E-mail:jiangkunzzy@126.com
廉昕(1987-),男,博士研究生,主要研究方向为航天测控、数字信号处理。
E-mail:lianxin 20032002@aliyun.com
许可(1988-),男,硕士,主要研究方向为航天测控、数字信号处理。
E-mail:xk361@163.com

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20140922.1654.001.html
Delay measurement method for frequency converting system
using phase calibration signal
JIAO Yi-wen1, WANG Yuan-qin1, JIANG Kun2, LIAN Xin1, XU Ke3
(1.DepartmentofOpticalandElectronicEquipmentAcademy,Beijing101416,China;
2.BeijingInstituteofTrackingandTelecommunicationTechnology,Beijing100094,
China; 3.ChinaXi’anSatelliteControlCenter,Xi’an710043,China)
Abstract:There are two problems in the measurement of the wideband frequency converting system using existing methods. One is inefficiency in measurement, the other is without effective group delay ambiguity resolution method. A new delay measurement method based on phase calibration (PCAL) signal is proposed and a group delay ambiguity resolution method based on extended Chinese remainder theorem (CRT) is given for solving the problems. The whole group delay characteristic of the tested bandwidth can be obtained by only one measurement according to the frequency characteristic of the PCAL signal. The robust condition of the extended CRT is derived. The ambiguity resolution strategy is detailed. Computer simulation results show that the delay measurement relative accuracy and the ambiguity resolution relative accuracy can reach the order of ps. The field experiment results show that the delay measurement relative accuracy reaches the order of 0.01 ns and the ambiguity resolution relative accuracy reaches the order of 0.1 ns.
Keywords:group delay; phase calibration (PCAL) signal; Chinese remainder theorem (CRT); delay measurement; ambiguity resolution
作者简介:
中图分类号:TN 98
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.06
基金项目:国家自然科学基金(61271265)资助课题
收稿日期:2014-05-09;修回日期:2014-08-06;网络优先出版日期:2014-09-22。
