虚拟路径整合的学习效应*
2015-02-05过继成思宛小昂
过继成思 宛小昂
(清华大学心理学系, 北京 100084)
1 问题提出
人行走在三维空间中, 为了到达计划的行进终点, 需要不断地更新自己的空间位置。由于空间环境中往往提供丰富的、具有特殊特征的物体作为寻路线索或路标, 人在行进中能够根据路标等环境线索对自己的空间位置进行更新。但是在沙漠、密林或者火灾现场等特殊环境中, 空间环境中往往缺少路标线索。在这种情况下, 人们可以通过整合自身运动信息来更新自身和空间环境之间的关系。这种依赖自身运动的速度和加速度信息来更新自身位置、朝向的过程被称作路径整合(Gallistel, 1990;Mittelstaedt & Mittelstaedt, 1982)。
路径整合研究早期主要关注的是动物行为, 并与动物的觅食行为紧密联系在一起。研究对象包括沙漠蚂蚁、沙鼠、狗、鹅等多种动物(Mittelstaedt &Mittelstaedt, 1982; Séguinot, Cattet, & Benhamou,1998; von Saint Paul, 1982; Wehner & Srinivasan,1981)。关于人类路径整合能力的研究早期主要以盲人或是蒙住眼睛的健康成人为被试, 研究的是没有视觉信息条件下的路径整合(Klatzky et al., 1990;Loomis et al., 1993), 使用的实验任务为路径完成任务。路径完成任务也被称为返回起点任务, 要求被试在完成由一些直线路段和转角组成的外出路径, 到达外出路径的终点后再自行直线返回起点。在这种路径完成任务中, 被试需要依赖对自身运动信息的整合才能从外出路径的终点直线返回起点,因此测量了被试的路径整合能力(过继成思, 宛小昂, 2014; 周佳树, 张侃, 2005)。
人类进行路径整合可以依赖内源性的运动信息, 也可以依赖外源性的运动信息。在研究没有视觉信息的路径整合时, 视力正常的被试在完成外出路径时需要蒙着眼睛并由主试牵引着走路, 但在返回时则需要自己返回。在这种情况下, 被试依赖的是前庭觉、本体感觉及传出神经系统提供的自身运动信息(Klatzky et al., 1990; Loomis et al., 1993)。近年来使用虚拟现实系统进行的路径整合研究则发现,人可以纯粹地依赖视觉流(Ellmore & McNaughton,2004; Péruch, May, & Wartenberg, 1997; Riecke, van Veen, & Bülthoff, 2002; Wiener & Mallot, 2006), 或是通过自身运动信息和虚拟现实系统提供的视觉流相结合来完成路径整合(Wan, Wang, & Crowell,2010, 2012, 2013)。.
尽管人们可以进行路径整合, 但是成绩却不如动物(Klatzky et al., 1990; Loomis et al., 1993; Passini,Proulx, & Rainville, 1990)。有学者提出这可能是因为人类和其它动物的路径整合研究在方法学上存在差异(Klatzky, Beall, Loomis, Golledge, & Philbeck,1999), 例如在路径完成任务中人没有机会主动选择自己要走的路径, 而动物的觅食研究中则有机会自己择路。但是Wan等(2010)给人类被试主动选择外出路径的机会, 却并没有提高路径完成绩效。这很有可能是因为视力正常的人在日常生活中往往依赖于视觉信息来完成空间任务。我们认为, 人的路径整合能力不如动物, 也有可能是因为人在日常生活中缺乏实践和练习的机会。在对运动员的路径整合能力的研究中, 研究者先让运动员和普通人两组被试预览面前物体的位置, 然后蒙上眼睛前去取物, 结果发现快速运动的条件下只有运动员组的被试能较好地完成任务(Bredin, Keulirzin, & Israël, 2005)。这样的结果说明, 运动训练有可能提升人的路径整合能力。但是,普通人的路径整合能力如何提高?
为了回答这个问题, 本研究检验了人类被试在路径整合中是否存在学习效应, 即检验多次反复地经历同样的外出路径并进行路径整合, 能否提高他们的任务绩效。本研究的结果具有重要的理论意义和实践意义。一方面, 如果重复地在相同空间布局的外出路径上进行路径完成任务可以提高被试的任务表现, 则说明路径整合能力是可以通过训练得到提高的, 揭示了人类路径整合的重要特点; 也从侧面说明, 人的路径整合能力不如动物, 可能是因为人在日常生活中依赖于路标, 而缺乏进行路径整合实践和练习的机会。另一方面, 路径整合能力对于人们在缺乏丰富视觉线索的沙漠、密林或火灾现场等特殊环境中进行寻路、逃生等有重要的作用。如果这种路径整合能力是通过训练可以提高的, 则为预防突发事件的逃生训练提供了新的思路。与已有的研究相比, 本研究的创新之处在于探究了空间布局(configuration)作为一种内隐习得的线索是否能够影响空间任务的表现, 不仅探究了学习效应是否存在, 也研究了学习的具体过程。
2 实验1
2.1 方法
2.1.1 被试
中国大学生24人(年龄在18~22岁之间, 平均19.5岁; 12男12女), 裸眼或矫正视力正常, 无色盲或色弱。所有被试来自一门心理学入门课程且完成实验后会得到实验学分。
2.1.2 仪器与材料
本研究的两个实验均使用Worldviz公司的nVisor SX60头盔式虚拟现实设备。头盔内的显示屏视场为44º(水平)×34º(竖直), 刷新率为60 Hz。被试参加实验时双手持罗技F710无线游戏手柄, 并通过按手柄上的3个按键分别作出行走、角度反应和距离反应。实验程序的控制和数据的记录通过Vizard 4.0软件执行,虚拟场景通过3D Max软件生成。
本研究的两个实验采用的虚拟环境为路段式迷宫,每个外出路径均包括5个路段。如图1(a)所示, 每个路段采用灰色岩壁式墙纸, 长3 m或5 m, 高2.2 m, 宽1 m。如图1(b)所示, 当被试行进到一个路段的终点, 他的面前会出现一个红色的箭头, 箭头指向左或右,指示被试向左或向右转以便面向下一个路段。两个路段之间的夹角为顺时针或逆时针的60°。如图1(c)所示, 当被试到达外出路径的终点时, 他会置身于一个直径为1 m的圆形房间里, 且墙纸的颜色变换为土黄色, 同时出现一根与地面平行的蓝色指示棒, 该指示棒起点在被试的身体而终点在墙壁上, 指示的是被试身体的朝向, 而且会随着被试身体的转动而旋转。如图1(d)所示, 当被试选择了起点的方向后, 一个长1000 m、高2.2 m、宽1 m的土黄色走廊会出现在他所选择的方向。

图1 本研究的虚拟场景示意图
如图2所示, 假设本研究中采用的3种基本的空间布局分别为A、B、C, A1、B1、C1为分别使用了这3种空间布局的外出路径; 外出路径A2、B2、C2分别使用了它们的镜像布局A’、B’、C’。由于这些布局内每个路段的长度都是一致的, 因此改变单个路段的长度会保持整个外出路径的空间布局信息不变, 但是行程距离改变。如前所述, 本研究中采用的路段长度为3 m或5 m, 因此使用3 m路段时的行程距离为使用5 m路段时的60%。因此, 图2中的外出路径A3、B3、B3也分别使用了布局A、B、C, 它们分别是外出路径的A1、B1、C1的比例改变。而外出路径A4、B4、C4则分别使用了布局A’、B’、C’, 是外出路径A1、B1、C1的镜像比例改变,也是外出路径A2、B2、C2的比例改变, 及外出路径的A3、B3、C3的镜像。

表1 实验1的4种实验顺序
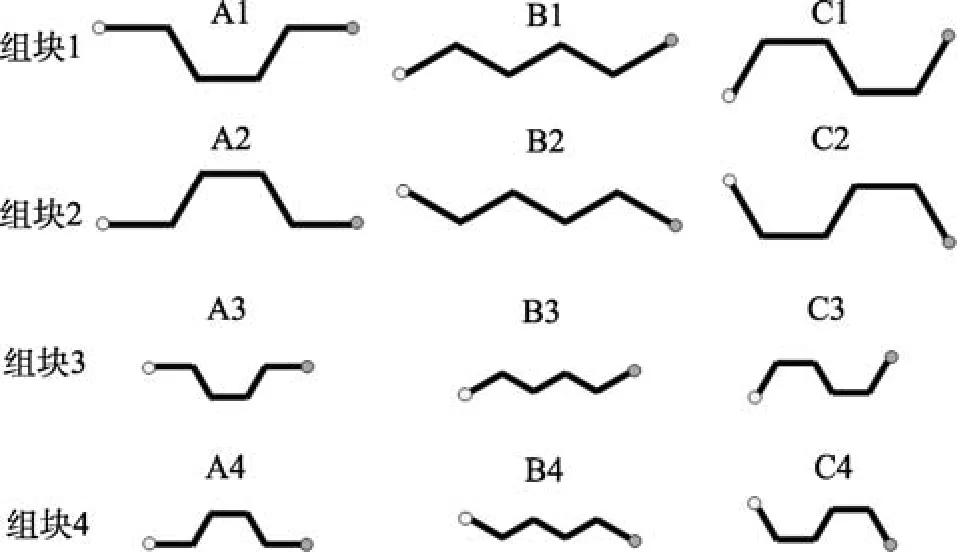
图2 实验1中的4组外出路径。任务要求被试起点(白色圆)出发, 完成5个路段后到达终点(灰色圆)
2.1.3 实验设计与流程
本研究中, 每位被试需要完成24个试次。我们将图2中所显示的外出路径A1、B1、C1编为1号组块, 将外出路径A2、B2、C2编为2号组块, 将外出路径A3、B3、C3编为3号组块, 将外出路径A4、B4、C4编为4号组块。对于每个被试而言, 组块内3个试次呈现的顺序是固定的; 但是对于不同的被试, 组块内3个试次呈现的顺序是不同的, 且我们通过拉丁方设计在被试之间进行了平衡以消除顺序效应。每位被试均需要将这4个组块分别重复2次, 且每个组块及其镜像组块交替呈现。换言之, 本研究中共有使用了6种空间布局, 即组块1和组块3使用了布局A、B、C, 而组块2和组块4使用了布局A’、B’、C’, 被试在整个实验中每种布局出现了4次。
对于一半被试来说, 前一半试次的外出路径中每个路段的长度都是3 m, 而后一半试次的外出路径中每个路段的长度都是5 m; 对于另一半被试则是先5 m后3 m。也就是说, 从第一组实验到第二组实验, 外出路径的空间布局相同, 行程距离也相同; 但是从第一、二组实验到第三、四组实验, 外出路径的空间布局相同, 但是行程距离成比例地改变了。因此, 在被试间进行平衡后, 本研究共有4种实验顺序, 如表1所示。本研究中的男女被试分别平均分配在这4种实验顺序中。在正式实验开始前, 实验员会请被试阅读指导语并完成一些练习,直到被试认为自己已经理解了实验任务后, 再开始进行正式实验。
在每一个试次中, 被试首先出现在整个外出路径的起点上并面对第一个路段, 所看到的虚拟场景如图1(a)所示。然后被试按手中的无线游戏手柄上的一个键进行虚拟的“行走”, 也就是他保持身体不动, 但是眼前呈现的视觉流令他觉得自己在沿着这个走廊直线前进。当被试虚拟地行进到这个走廊终点, 他的面前会出现图1(b)中呈现的红色箭头, 指示他向左或向右转, 直到面向下一个路段。在这个过程中, 被试需要实际转动他的身体。如此循环反复, 直到被试走到第5个路段的终点, 他会置身于图1(c)中显示的土黄色圆形房间中。这时, 任务要求被试做出方向的反应, 即转动自己的身体直到面向外出路段的起点, 并按下无线游戏手柄上的一个键。然后图1(d)中所示的长走廊会出现在他所选择的方向, 被试需要作出距离反应, 即再按下无线游戏手柄上的一个键进行虚拟的“行走”, 直到他认为自己已回到整个外出路径的起点并按另一个键停下。在这个过程中, 被试进行的方向反应及其反应时、距离反应均被程序记录下来。如此循环反复, 直到完成所有试次。整个实验中不提供任何反馈信息。
2.1.4 数据分析
在本研究中, 我们主要通过反应时、位置误差、距离误差、角度误差这4个指标来衡量被试的路径完成成绩。如图3所示, 在一个试次中, 被试从起点H出发, 经过5个路段达到外出路径的终点。如果要从终点直线返回起点H, 他应该转Ac这个角度, 面向起点H, 然后沿着这个方向直线前进距离Dc, 最后达到起点H。但是, 他实际的反应可能是转了Ar这个角度, 然后沿着该方向直线前进一段距离Dr, 到达一个新的位置Hr。他实际到达的位置Hr和外出路径的起点H之间的直线距离, 就是他在路径完成任务中的位置误差。位置误差越小,说明他实际到达的地点越接近起点, 即他的路径完成任务的成绩越好。
而位置误差的大小, 实际上同时受到距离误差和角度误差的影响。仍以图3为例, 距离误差是指反应距离(Dr)和正确距离(Dc)之差的绝对值, 该值越小则说明被试对距离估计得越准确。而反应角度(Ar)和正确角度(Ac)之差的绝对值, 则是被试的角度误差, 该值越小说明被试对方向的估计越准确。
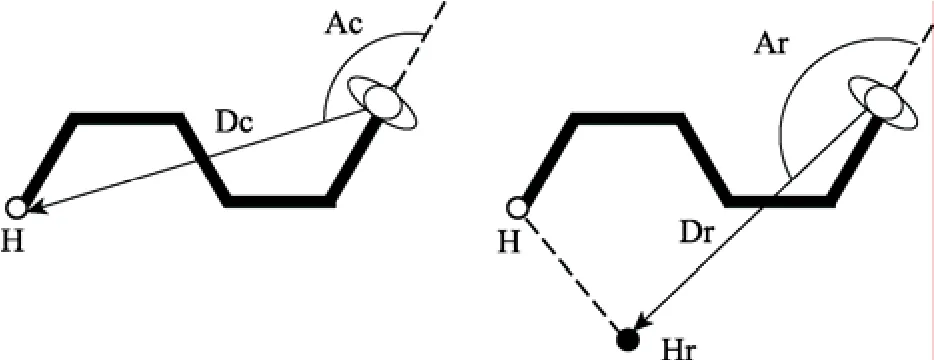
图3 路径完成任务的因变量
对于前文提到的3种基本空间布局来说, 组块1中基本外出路径与组块2中的镜像路径的正确距离Dc相同, 正确角度Ac的绝对值相同但是转的方向不同; 组块1中的基本外出路径与组块3中的比例改变路径的正确距离Dc不同(成比例改变), 正确角度Ac的绝对值相同而且方向也相同; 组块1中的基本外出路径与组块4的镜像比例改变路径的正确距离Dc不同(成比例改变), 正确角度Ac的绝对值相同但是转的方向不同。
2.2 结果
在进行数据分析时, 我们剔除了一些由于被试操作失误而造成的无效试次(反应距离为0或反应角度在3°以下), 剔除的试次占总试次的2.6%。然后我们计算了各种条件下的平均位置误差、角度误差、距离误差和反应时, 结果显示在图4中。我们对每个因变量进行了4(空间布局的出现次数:1、2、3、4)×2(性别:男或女)的混合方差分析, 其中布局重复次数为组内变量, 而性别为组间变量。


2.3 讨论
本实验主要有3个发现。首先, 当被试在同样布局的外出路径上重复地完成路径完成任务, 他们在第二次接触这些外出路径时比第一次时的位置误差和角度误差均减小了, 做出方向判断的反应速度也提高了。第二, 尽管本实验中前一半试次和后一半试次中的空间布局相同, 但是单个路段的长度不同(3 m或5 m), 因此前一半试次和后一半试次中的外出路径在保持空间布局的条件下有了成比例的改变。但是, 我们在第2、3、4组的位置误差和距离误差上均没有发现显著差异。这个结果说明,对外出路径的学习效应可以迁移到同样空间布局但是行程成比例改变的其它外出路径中。第三, 本研究中性别的主效应, 以及性别和路径重复之间的交互作用, 在位置误差和角度误差上均不显著。
本实验中采用的外出路径包括5个路段, 在这样的外出路径上进行路径完成任务, 难度是很高的。但是, 这些外出路径的空间布局具有一定的特殊性, 即每个路段的长度都相等, 且任何两个路段之间的夹角都是60°。因此, 这些外出路径的特殊性也许会使被试更能受益于学习效应。如果使用更为复杂的空间布局, 例如, 每个路段的长度不相等,每两个路段的夹角也具有多样性, 则路径的重复是否能引起学习效应则是未知的。我们在实验2中对这个问题进行了检验。

图4 实验1中的位置误差、距离误差、角度误差、反应时, 误差线表示标准误
3 实验2
3.1 方法
3.1.1 被试
中国大学生24人(年龄在16~22岁之间, 平均19.3岁; 12男12女)参加了本实验。他们的裸眼或矫正视力正常, 无色盲或色弱。部分被试来自一门心理学入门课程, 完成实验后会得到实验学分; 其他被试通过校园广告招募,完成实验后得到30元现金报酬。所有被试均没有参加过实验1。
3.1.2 仪器与材料
本实验采用与实验1相同的仪器设备和非常相似的虚拟场景。主要区别在于本实验采用了空间布局更为复杂的外出路径。本实验中, 每个外出路径均包括5个路段, 但是这5个路段的长度不尽相同,每个路段的长度为3 m或5 m; 而且每两个路段之间的夹角为顺时针或逆时针的60或120°。在这样的限制条件下, 我们通过计算机程序随机选择每个路段的长度(3 m或5 m)及每个夹角(顺时针60°、顺时针120°、逆时针60°、或逆时针120°), 得到大量不同空间布局的外出路径。在每个被试参加实验前,我们通过计算机程序随机选择其中的3种外出路径用于实验。对于一位被试而言, 假设我们使用的3种基本的空间布局分别为A、B、C, 则A1、B1、C1为分别使用了这3种空间布局的外出路径; 外出路径A2、B2、C2分别使用了它们的镜像布局A’、B’、C’。因此, 在本实验中共使用了72个不同布局的外出路径(每位被试3个外出路径×24位被试)。图5以2位被试遇到的基本外出路径为例, 展现本实验中外出路径的复杂多样化。
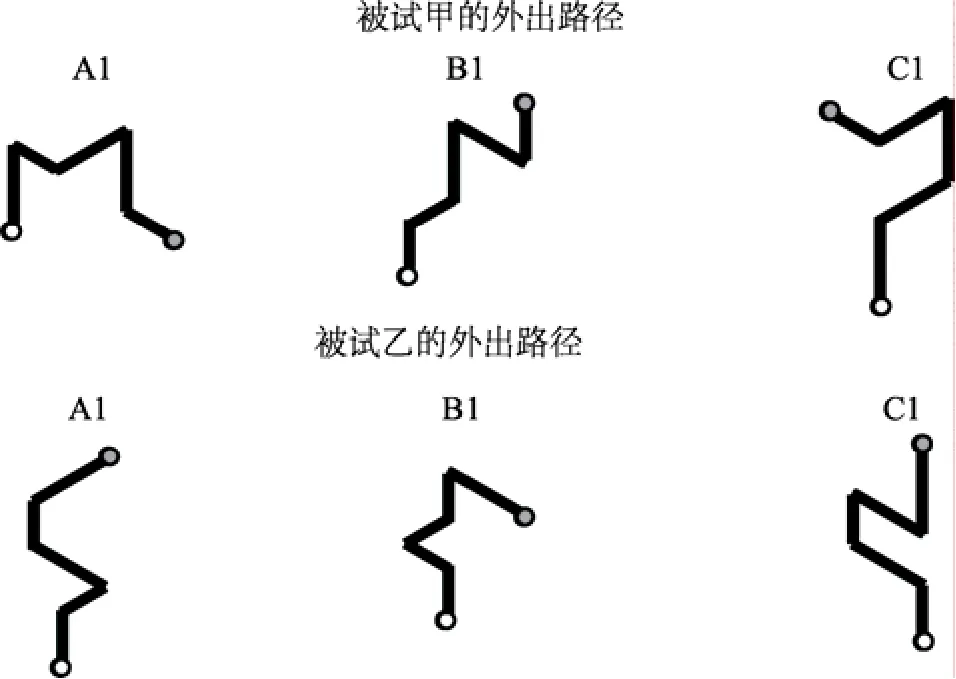
图5 举例说明实验2中外出路径的复杂多样性。任务要求被试起点(白色圆)出发, 完成5个路段后到达终点(灰色圆)。不仅被试甲与被试乙的外出路径具有不同的空间布局, 其他被试的外出路径也各不相同

表2 实验2中的实验顺序
3.1.3 实验设计与数据分析
与实验1相同, 每位被试仍然完成24个试次,但是本实验中不存在空间布局的比例改变。对于每位被试, 我们将基本外出路径A1、B1、C1编为1号组块, 将镜像外出路径A2、B2、C2编为2号组块。实验顺序如表2所示。
由于外出路径的空间布局各不相同, 不同外出路径上的正确反应之间差别很大。我们将本实验中所使用的72个外出路径进行分析, 发现正确距离在4.4 m至18 m之间, 而正确角度在29°至176°之间, 因此不能直接把一种外出路径上的反应误差与另一种外出路径上的反应误差直接进行比较。例如,正确距离为4.4 m时产生1 m的误差, 与正确距离为18 m时产生1m的误差, 误差的绝对值相同, 但是任务的实际表现水平差异其实很大。因此, 除了反应时之外, 我们采用比例位置误差(位置误差与正确距离之间的比值)、比例距离误差(距离误差与正确距离之间的比值)、比例角度误差(角度误差与正确角度之间的比值)来衡量被试在路径完成任务中的表现。
3.2 结果与讨论
与实验1相同, 我们仍然剔除了本实验中由于被试操作失误而造成的无效试次(反应距离为0或反应角度在3°以下), 剔除的试次占总试次的4.0%。然后我们计算了各种条件下的比例位置误差、比例角度误差、比例距离误差和反应时的平均值, 结果显示在图6中。我们对每个因变量进行了4(空间布局的出现次数:1、2、3、4)×2(性别:男或女)的混合方差分析, 其中布局重复次数为组内变量, 而性别为组间变量。

本实验采用了更为复杂多样化的外出路径。一方面, 同一个外出路径内的每个路段的长度不尽相同, 路段的夹角也具有多样性; 另一方面, 不同的被试在不同的外出路径上进行实验。但是, 本实验的结果仍然表明, 路径的重复能够引起学习效应。具体而言, 本实验主要有两个发现。首先, 当被试在同样布局的外出路径上重复地完成路径完成任务, 他们在第四次接触这些外出路径时比第一次时的比例位置误差减小了, 做出方向判断的反应速度也提高了。第二, 本研究中性别的主效应, 以及性别和路径重复之间的交互作用, 均不显著。这个实验结果说明, 男性和女性同样可以受益于复杂路径重复带来的学习效应。

图6 实验2中的比例位置误差、比例距离误差、比例角度误差、反应时。误差线表示标准误。
4 总讨论
本研究主要有两个发现。首先, 当被试在同样布局的外出路径上重复地完成路径完成任务, 他们的位置误差减小, 做出方向判断的反应速度也提高了。当然, 这种学习效应也受到外出路径的空间布局复杂性的影响。实验1中外出路径的空间布局比较特殊, 被试在第二次接触这些外出路径时比第一次时的位置误差、角度误差、反应时均减小了, 说明特殊空间布局的外出路径只接触一次就有可能提高人的路径整合成绩。此外, 实验中前一半试次和后一半试次中的外出路径在保持空间布局的条件下有了成比例的改变, 但是被试在第2、3、4次外出路径重复时的位置误差和距离误差上均没有显著变化, 说明对这种特殊空间布局的学习效应可以迁移到同样空间布局但是行程成比例改变的其它外出路径中。实验2中外出路径的空间布局更为复杂且具有多样性, 则被试在第四次接触这些外出路径时比第一次时的比例位置误差和反应时也减小了, 说明更复杂的空间布局需要更多次数的重复才可以提高人的路径整合成绩。值得注意的是, 本研究中被试在这些外出路径上完成任务的时候, 并没有得到任何关于成绩的反馈。这说明, 通过在同样布局的外出路径进行路径完成任务, 产生了学习效应。第二, 本研究中性别的主效应, 以及性别和路径重复之间的交互作用, 在大部分情况下均不显著。尽管空间任务中的性别差异一直得到较多关注(Linn & Petersen, 1985), 但是也有一些研究表明,这些性别差异是可以通过引导人们改变策略而消除的(Wan, Newcombe, & Fitzhugh, 2013)。本研究的结果说明, 男性和女性同样可以受益于路径重复带来的学习效应。
值得注意的是, 本研究中空间布局的重复提高路径整合表现的结果, 并不足以用来判断路径整合的空间表征和空间更新机制是怎样的。人们的空间表征, 可以是以自身为参考系的(egocentric representation),当人们运动时则需要对这样的表征进行更新; 也可能是不以自身为参考系(allocentric representation)甚或是对周围环境拥有一个认知地图(cognitive map), 当人们运动时只需更新自身在该地图中的位置和朝向。这两种空间更新都可以支持人们进行路径整合。如果是以自我为参考系, 人们在运动中以自身位置为参照点, 更新外出路径的起点相对于自身的位置和朝向(Wan et al., 2012, 2013)。如果不以自我为参考系, 人们在运动中可以外出路径的起点为参照点, 更新自己相对于起点的位置和朝向(Loomis, Klatzky, Golledge, & Philbeck, 1999; Kearns,Warren, Duchon, & Tarr, 2002等)。而后一种路径整合的方式, 则很有可能依赖于被试对外出路径的空间布局的内部表征(Fujita, Klatzky, Loomis, &Golledge, 1993; Klatzky, Loomis, Beall, Chance, &Golledge, 1998)。本研究中被试重复接触同样空间布局的外出路径对两种类型的空间更新都有帮助。一方面, 重复接触同样布局的外出路径, 可以增进被试对于该环境的知识和经验。这样的知识和经验已经被证实对被试的距离估计和寻路任务表现有帮助(Gillner & Mallot, 1998; Péruch, Vercher, &Gauthier, 1995), 也有可能对以自我为参照系的空间更新有帮助。另一方面, 重复接触同样布局的外出路径, 也可能使被试对这些外出路径有更好的内在表征, 从而促进不以自我为参照系的空间更新。毋庸质疑的是, 无论使用以上两种空间更新中的哪一种来进行路径整合(Wiener, Berthoz, & Wolbers,2011), 都可受益于本研究所揭示的学习效应。
此外, 本研究所揭示的学习效应, 也可能类似于视觉认知中的内隐学习(implicit learning)。在视觉搜索的研究中, 如果在视觉搜索任务中让刺激和特定的空间布局(spatial configuration)匹配, 那么当这些空间布局重复出现时, 被试的视觉搜索反应就会显著变快, 体现了重复出现的空间布局对视觉搜索的自上而下方式的注意引导(Chun & Jiang, 1998,1999)。我们认为, 本研究中外出路径空间布局的重复, 也可能有内隐学习的作用。
但是, 本研究也存在一定的局限性。首先, 本研究使用的是头盔式虚拟现实系统, 由于实验空间的限制, 因此被试的直线前进是靠按键完成的, 而没有对于直线运动的身体信息。而被试身体的旋转则是通过真实地旋转身体而完成的, 使被试能从视觉流和身体两方面得到关于方向的运动信息。这可能解释了为什么实验1中学习效应在角度误差上是显著的, 而在距离误差上则不显著。如果能同时提供身体信息和视觉流信息, 被试的表现可能会更好(Sun, Campos, & Chan, 2004)。第二, 尽管已有研究表明人的空间更新系统以相似的方式对真实环境和虚拟环境进行自动加工(Wan, Wang, & Crowell,2009), 但是虚拟现实空间与真实环境存的差异仍是不可忽视的。如果要将本研究的结果直接推广至人们在真实环境中的寻路表现, 则需要非常谨慎。
总而言之, 本研究的结果表明, 重复地在相同空间布局的外出路径上进行路径完成任务可以提高被试的任务表现, 而且对外出路径的学习效应可以迁移到同样空间布局但是行程成比例改变的其它外出路径中。这为训练人类路径整合能力的可行性提供了一定的实证依据。而空间整合能力对于人们在缺乏丰富视觉线索的沙漠、密林或火灾现场等特殊环境中进行寻路、逃生等有比较重要的作用。本研究的结果初步证实了路径整合能力是可以通过训练得到提高的。
Bredin, J., Kerlirzin, Y., & Israël, I. (2005). Path integration:Is there a difference between athletes and non-athletes?
Experimental Brain Research, 167
(4), 670–674.Chun, M. M., & Jiang, Y. H. (1998). Contextual cueing:Implicit learning and memory of visual context guides spatial attention.
Cognitive Psychology,36
(1), 28–71.Chun, M. M., & Jiang, Y. H. (1999). Top-down attentional guidance based on implicit learning of visual covariation.
Psychological Science,10
(4), 360–365.Ellmore, T. M., & McNaughton, B. L. (2004). Human path integration by optic flow.
Spatial Cognition and Computation, 4
, 255–273.Fujita, N., Klatzky, R. L., Loomis, J. M., & Golledge, R. G.(1993). The encoding-error model of pathway completion without vision.
Geographical Analysis, 25
(4), 295–314.Gallistel, C. R. (1990).
The organization of learning
.Cambridge, MA: MIT Press, Bradford Books.Gillner, S., & Mallot, H. A. (1998). Navigation and acquisition of spatial knowledge in a virtual maze.
Journal of Cognitive Neuroscience, 10
(4), 445–463.Guo, J. C. S., & Wan, X. A. (2014).Psychological and neural mechanisms of human path integration.
Journal of Psychological Science, 37
(2), 494–498.[过继成思, 宛小昂. (2014). 人类路径整合的心理机制与神经基础.
心理科学, 37
(2), 494–498.]Kearns, M. J., Warren, W. H., Duchon, A. P., & Tarr, M. J.(2002). Path integration from optic flow and body senses in a homing task.
Perception, 31
, 349–374.Klatzky, R. L., Beall, A. C., Loomis, J. M., Golledge, R. G., &Philbeck, J. W. (1999). Human navigation ability: Tests of the encoding-error model of path integration.
Spatial Cognition & Computation, 1
(1), 31–65.Klatzky, R. L., Loomis, J. M., Beall, A. C., Chance, S. S., &Golledge, R. G. (1998). Spatial updating of self-position and orientation during real, imagined, and virtual locomotion.
Psychological Science, 9
(4), 293–298.Klatzky, R. L., Loomis, J. M., Golledge, R. G., Cicinelli, J. G.,Doherty, S., & Pellegrino, J. W. (1990). Acquisition of route and survey knowledge in the absence of vision.
Journal of Motor Behavior, 22
, 19–43.Linn, M. C, & Petersen, A. C. (1985). Emergence and characterization of gender differences in spatial abilities: A meta-analysis.
Child Development, 56
, 1479–1498.Loomis, J. M., Klatzky, R. L., Golledge, R. G., & Philbeck, J.W. (1999). Human navigation by path integration. In R. G.Golledge (Ed.),
Wayfinding behavior: Cognitive mapping and other spatial processes
(pp. 125–151). Baltimore:Johns Hopkins University Press.Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G.,Pellegrino, J. W., & Fry, P. A. (1993). Nonvisual navigation by blind and sighted: Assessment of path integration ability.
Journal of Experimental Psychology: General,122
(1),73–91.Mittelstaedt, H., & Mittelstaedt, M. L. (1982). Homingby path integration. In F. Papi & H. G. Wallraff (Eds.),
Avian navigation
(pp. 290–297). New York: Springer.Passini, R., Proulx, G., & Rainville, C. (1990). The spatio-cognitive abilities of the visually impaired population.
Environment and Behavior, 22
, 91–116.Péruch, P., May, M., Wartenberg, F. (1997). Homing in virtual environments: Effect of field of view and path layout.
Perception, 26
, 301–311.Péruch, P., Vercher, J. L., & Gauthier, G. M. (1995).Acquisition of spatial knowledge through visual exploration of simulated environments.
Ecological Psychology,7
(1), 1–20.Riecke, B. E., van Veen, H. A. H. C., & Bülthoff, H. H. (2002).Visual homing is possible without landmarks: A path integration study in Virtual Reality.
Presence, 11
, 443–473.Séguinot, V., Cattet, J., & Benhamou, S. (1998). Path integration in dogs.
Animal Behaviour,55
, 787–797.Sun, H. J., Campos, J. L., & Chan, G. S. (2004). Multisensory integration in the estimation of relative path length.
Experimental Brain Research, 154
(2), 246–254.von Saint Paul, U. (1982). Do geese use path integration for walking home? In F. Papi & H. G. Wallraff (Eds.),
Avian Navigation
(pp. 298–307). New York: Springer.Wan, X. A., Newcombe, N. S., & Fitzhugh, S. (2013).Elimination of sex difference in direction giving.
Cognitive Processing, 14
, 197–199.Wan, X., Wang, R. F., & Crowell, J. A. (2009). Spatial updating in superimposed real and virtual environments.
Perception & Psychophysics, 71
, 42–51.Wan, X. A., Wang, R. F., & Crowell, J. A. (2010). The effect of active selection in human path integration.
Journal of Vision, 10
(11), 25.Wan, X. A., Wang, R. F., & Crowell, J. A. (2012). The effect of landmarks in human path integration.
Acta Psychologica,140
, 7–12.Wan, X. A., Wang, R. F., & Crowell, J. A. (2013). Effects of basic path properties on human path integration.
Spatial Cognition & Computation, 13
, 79–101.Wehner, R., & Srinivasan, M. V. (1981). Searching behaviour of desert ants, Genus Cataglyphis.
Journal of Comparative Physiology,142
, 315–338.Wiener, J. M., Berthoz, A., & Wolbers, T. (2011). Dissociable cognitive mechanisms underlying human path Integration.
Experimental Brain Research,208
, 61–71.Wiener, J. M., & Mallot, H. (2006). Path complexity does not impair visual path integration.
Spatial Cognition &Computation, 6
, 333–346.Zhou, J. S., & Zhang, K. (2005). Kinesthetic, irrelevant motion and path integration.
Journal of Psychological Science, 28
(6), 1306–1308.[周佳树, 张侃. (2005). 运动觉、布局无关运动与路径整合.
心理科学, 28
(6), 1306–1308.]