基于联合仿真技术的汽车主动悬架模糊控制仿真分析
2015-01-27鲍晓东张仙妮丁金刚
鲍晓东,张仙妮,丁金刚
(1.北京工业职业技术学院,北京 100042;2.北京汽车动力总成有限公司 技术中心,北京 101106)
0 引言
随着汽车技术的快速发展,人们对汽车乘坐舒适性的要求越来越高。主动用悬架技术能有效提高汽车乘坐的舒适性。目前,国内外许多学者对主动悬架做了大量的研究工作,采用了各种控制方法,主要有PID 控制、LQG 控制、滑模变结构控制、神经网络控制等方法。但大多是建立在数学模型的基础上,对车辆运动进行的仿真研究,事实上汽车在运动过程中许多参数不易测得,所以使用数学模型进行分析,必然使分析结果具有一定的不准确性[1]。把Adams 和Matlab 结合起来使用,充分发挥它们各自的优势,这将给一些复杂系统的研究提供一种新的途径[2]。本文以某轿车为研究对象,运用多体动力学建模软件Adams/car 建立车辆动力学整车模型, 并在Matlab/Simulink 中创建模糊控制器建立一个联合的闭合主动悬架控制环境,利用该环境对汽车联合控制进行仿真。
1 整车模型的建立
使用Adams/car 的建模器模块快速创建前后悬架、发动机、转向系、车身、前后轮胎、制动器等所需模型,然后在标准模块将这些模型的子系统装配成整车虚拟样机。修改Adams/car 中原有的模板文件创建整车虚拟样机。转向系统、前后轮胎系统、前后双横臂主动悬架系统、制动系统以及车身系统和发动机系统在此模板界面下依次被创建。最后将各子系统装配成装有主动悬架的整车虚拟样机[3]。
2 图形分析
使用模糊控制器并结合上面生成的Adams 控制模板与Matlab 建立整车联合仿真模型[4],如图1 所示。
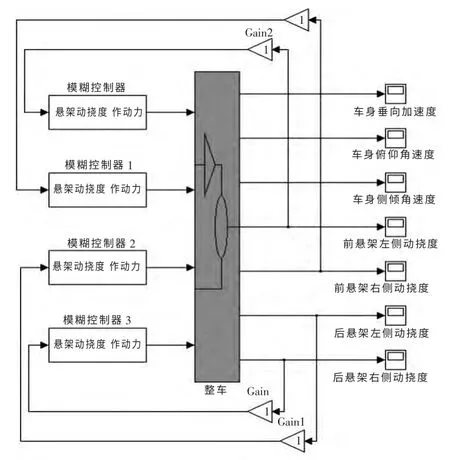
图1 整车联合仿真模型
以下各图为汽车车速20m/s、随机路面下的整车评价指标时域响应:
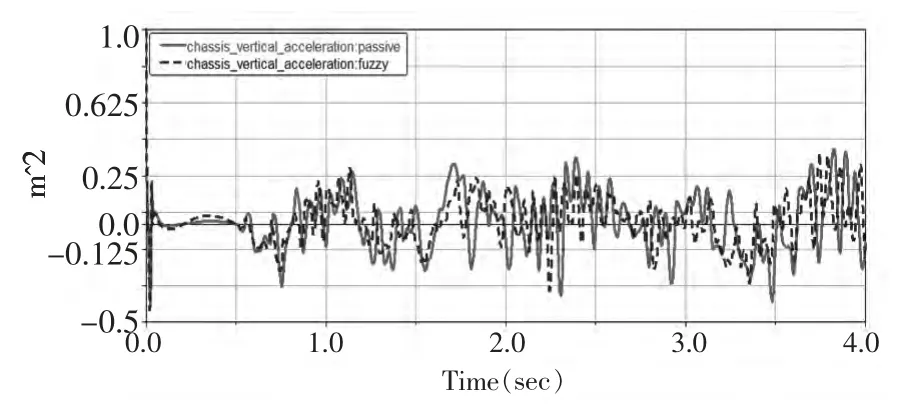
图2 车身垂向加速度时域响应

图3 车身侧倾角速度时域响应

图4 车身俯仰角速度时域响应
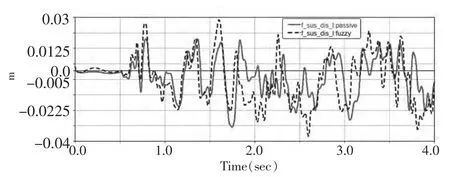
图5 前悬架左侧动挠度时域响应
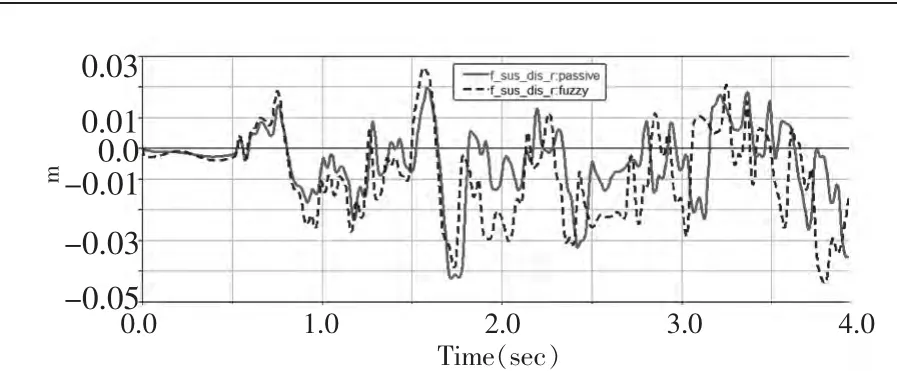
图6 前悬架右侧动挠度时域响应

图7 后悬架左侧动挠度时域响应
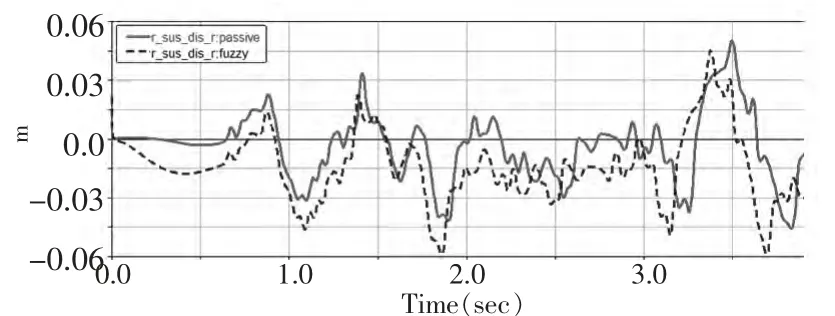
图8 后悬架右侧动挠度时域响应
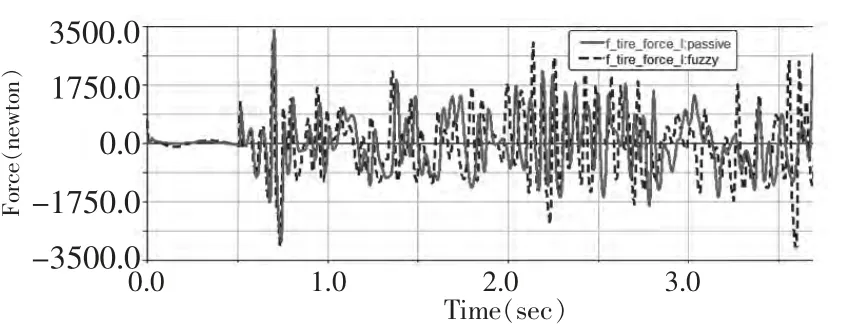
图9 左前轮动载荷时域响应

图10 右前轮动载荷时域响应

图11 左后轮动载荷时域响应
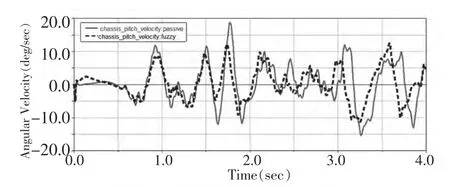
图12 右后轮动载荷时域响应
表1 为仿真数据对比:

表1 车速10m/s仿真数据对比
由图2~图12 和表1 可知,在模糊控制器控制下,相比被动悬架:装有主动悬架的整车的车身垂向加速度、车身侧倾角速度、车身俯仰角速度明显降低,且变化趋于平稳;前后悬架的左右两侧的悬架动挠度均略有增加,但在允许变化范围内;右后轮动载荷及左前轮动载荷均降低,但左后轮动载荷及右前轮动载荷略有增加,但幅度较小,没有影响到操纵稳定性[5]。
以下各图汽车车速10m/s、脉冲路面下的整车评价指标时域响应。

图13 车身垂向加速度时域响应
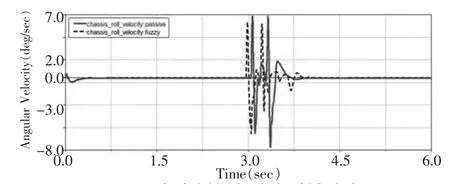
图14 车身侧倾角速度时域响应
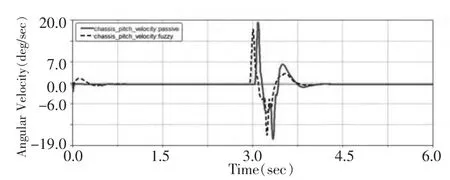
图15 车身俯仰角速度时域响应
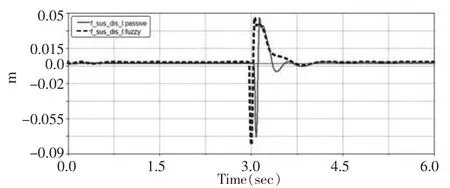
图16 前悬架左侧动挠度时域响应

图17 前悬架右侧动挠度时域响应

图19 后悬架右侧动挠度时域响应

图20 左前轮动载荷时域响应
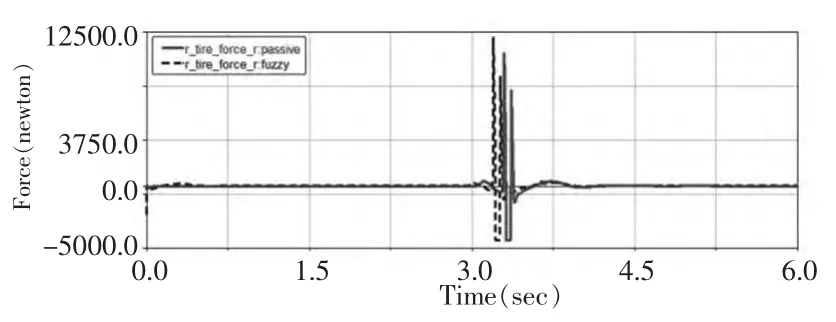
图21 右前轮动载荷时域响应
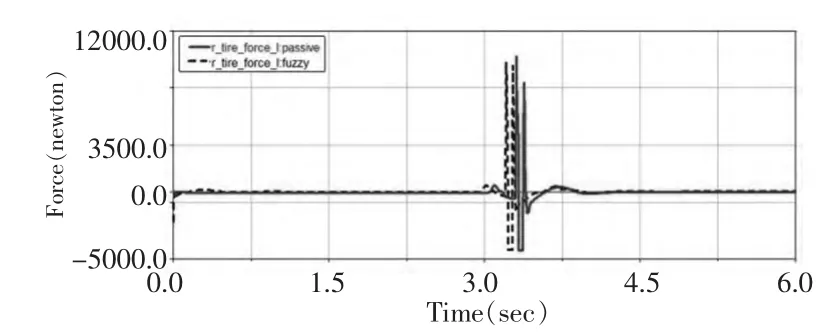
图22 左后轮动载荷时域响应

图23 右后轮动载荷时域响应

表2 车速10m/s仿真数据对比
由图13~图22 和表2 可知,在模糊控制器控制下,相比被动悬架:装有主动悬架的整车的车身俯仰角速度、车身侧倾角速度和车身垂向加速度明显降低,且变化趋于平稳;前悬架的左右两侧的悬架动挠度变化较小,但在允许变化范围内,后悬架的左右两侧的悬架动挠度变化较大,已超出允许范围;左前轮动载荷、右后轮动载荷、右前轮动载荷和左后轮动载荷均略有增加,但幅度较小,没有影响到操纵稳定性。
3 结论
本文设计的采用模糊控制器的主动悬架在随机路面和脉冲路面下均使车辆的行驶平顺性得到提高,对悬架动挠度和轮胎动载荷的控制效果一般,未能提高车辆的操纵稳定性,还有待进一步研究。
[1]郑泉,陈黎卿,等.基于ADAMS/ Car 和Simulink 的主动悬架遗传模糊控制[J].农业机械学报,2009,2.
[2]王涛,张会明.基于ADAMS 和MATLAB 的联合控制系统的仿真[J].机械工程与自动化,2005,3.
[3]王国丽,黄小海,刘树辉,李庆伟. 汽车悬架稳定杆连杆支架的疲劳仿真分析及结构优化[J].工程设计学报,2013,1.
[4]陈龙,汪若尘.半主动悬架及其控制系统的时滞控制研究[J].中国机械工程,2005,25.
[5]管继富,侯朝桢,顾亮,等.基于神经网络的半主动悬架自适应模糊控制[J].汽车工程,2003,6.
