模块化多维直线运动机电平台
2015-01-27马俊林郑黎明
马俊林,沙 欧,郑黎明
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130000)
0 引言
光机电产品在人们的日常生活,在航天航空产品,在工业生产和检测中的应用越来越广泛。光机电产品水平已经时一个国家工业基础能力的重要标志之一[1]。调焦机构作为光机产品必不可少的功能机构,越来越受到人们的普遍重视,它直接影响光测设备的测量结果[2]。调焦或叫对焦、聚焦是改变镜头光心到底片平面的距离以获得本物体清晰像的调节过程。实现这一功能必须引入直线运动,也就是说需要一个直线运动作为该功能的载体。而对于大多数独立光学机构来说,直线运动平台是调焦的主要机械载体。很多光机产品不仅需要在一维方向上调焦,往往需要在二维,甚至三维空间上进行调焦,这样就需要该直线运动平台不仅可以在一个方向上做直线运动,也需要在二个甚至三个方向上做直线运动。本文提出的模块化多维直线运动机电平台,很好的解决了这一问题。该直线运动平台通过电机、丝杠、直线导轨和滑块、固定座等电气组件和机械元件组成一维直线运动机电平台,并将一位运动平台模块化,通过滑块和底座的一体化形成二维,进而形成三维运动机电平台,去实现多维度的直线位移运动,从而实现多维度的光机系统的调焦。
1 一维直线运动机电平台的实现
该直线运动平台的设计思想是通过器件搭建的思想和方法实现直线运动。为了更加方便和可靠的搭建整个平台,尽量用可以采购的产品去构建,减少相关机械件的加工,并尽可能的减少装调。本文通过一维直线运动机电平台的搭建过程详细说明整体设计思路。
设计加工出平台底座。在平台底座上加工出和直线导轨相配合的凸台,和电机组件相配合的安装孔,和限位开关安装位置相配合的安装孔,还有平台的安装孔等等,如图1 所示。
选用安装成套的直线电机组件。该直线电机组件包含有直线电机,和电机已经连接为一体的丝杠,和丝杠配套的螺母滑块,丝杠螺母调教方式的优点是机构简单成本低[3]。根据平台的精度和回程误差要求选择精度相匹配的丝杠和电机的分辨率。加工出和直线电机相配合的直线电机座,并将直线电机固定在平台底板上。加工出和螺母滑块相配合的滑块安装块,将其和螺母滑块相连接。

图1 直线电机安装图Fig.1 Installation of line motor
选用和安装直线导轨和滑块。如图2 所示,根据导轨的承载和精度选取导轨和滑块的型号,选取导轨的跨距和尺寸选取滑块的数量和大小。将两组直线导轨和滑块组件安装到平台底板相应的导轨凸台位置。

图2 限位开关和零点开关的安装Fig.2 Installation of limit switch and zero points witch
选用和安装限位开关和零位开关。在滑块运动的极限位置安装两个限位开关,在零点位置安装光电开关。
设计加工出平台上板。如图3 所示,根据相机的安装条件设计加工出平台上板,平台上板和直线导轨滑块和滑块安装块通过螺钉相连接,这样就完成了整个直线运动机电平台的搭建。
平台的运动原理:电机的动力通过丝杠传递给螺母滑块,螺母滑块和滑块固定块相连接,这样就把动力传递给螺母滑块,进而将动力传递给与螺母滑块相连接的滑块固定块,进而将动力传递给与滑块固定块相连接的平台上板,再将动力传递给与平台上板相连接的滑直线导轨滑块机构,从而使平台上板做直线运动,如图4 所示。这样,一维直线运动机电平台就搭建完毕。将相机安装在平台上板上,就可以实现相机在平行于电机输出轴方向上的直线运动,即该方向上的调焦运动。
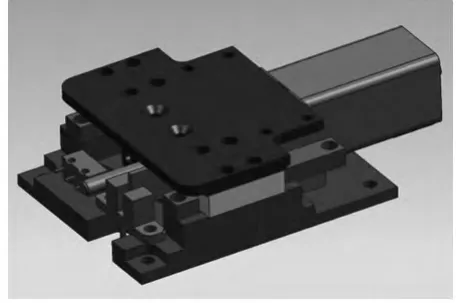
图3 平台上板的安装Fig.3 Installation of head plate of the platform

图4 平台运动原理Fig.4 Movement principle of the platform
2 多维直线运动机电平台的实现
第一节实现了一维直线运动机电平台的搭建,应用广义模块化的思想(广义模块化思想是具有固定拓扑结构的参数化模块[4]),采用横向系类模块化设计方法(不改变产品主要参数,利用模块化发展变形产品[5]),只需要将两个或者三个同样的一维直线运动机电平台结构在另一个方向上罗列叠加起来,就可以实现在该方向的直线运动,进而实现二维和三维直线运动。
2.1 二维直线运动机电平台的实现
为了实现二维直线运动机电平台,需要将两个一维直线运动机电平台叠加起来。将一维直线运动机电平台的平台上板和另一台一维直线运动机电平台的平台底板做成一个机械件,即将其一体化,并将电机的方向垂直交叉就可以实现,如图5 所示。从图中可以看出,下面一维直线运动机电平台的上板和上面一维直线运动机电平台的底板设计加工成了一个机械件——连接板。这样在上面一维直线运动机电平台的上板上安装相机,就可以实现相机在二维方向上的调焦功能。
2.2 三维直线运动机电平台的实现

图5 二维直线运动机电平台Fig.5 Two-dimensions modularity rectilinear electromechanical platform
为了实现三维直线运动机电平台,需要一个一维直线运动机电平台和一个二维直线运动机电平台叠加起来。将一维直线运动机电平台的平台上板和二维直线运动机电平台的平台底板做成一个机械件,即将其一体化,并将三个电机轴线方向形成一个三个方向的垂直坐标系就可以实现,如图6 所示。从图中可以看出,一维直线运动机电平台的上板和上面二维直线运动机电平台的底板设计加工成了一个机械件——垂直连接板。这样在二维直线运动机电平台的上板上安装相机,就可以实现相机在三维方向上的调焦功能。

图6 三维直线运动机电平台Fig.6 Three-dimensions modularity rectilinear electromechanical platform
3 结论
本文提出一种模块化的多维直线运动机电平台。每一维运动平台通过直线电机,丝杠,直线导轨滑块和相应配合的机械件组成。应用模块化的思想,将一维移动平台通过滑块和底座的一体化形成二维直线运动机电平台,进而在形成三维直线运动机电平台,从而去满足光机产品在多维度方向上的调焦功能。当然,作为一种独立的机电产品,该多维直线运动平台不仅可以应用到光机产品中,还可以应用到任何一种需要直线位移运动的产品和场合中,来实现多维度的直线运动。
[1]刘娇,等.浅谈光机电一体化技术及其发展前景[J].科技向导,2012,30.
[2]刘焕雨,等.图像法自动调焦原理及系统实现[J].控制系统,2008,24.
[3]王智,等.传输型立体测绘相机的调焦机构设计[J].光学精密工程,2009,5.
[4]高卫国,等.广义模块化设计原理及方法[J].机械工程学报,2007,6.
[5]蔡业彬,等.模块化设计方法及其在机械设计中的应用[J].机械设计与制造,2005,8.
