电励磁同步电机转子高频电流信号提取无速度传感器控制
2015-01-25吴轩钦谭国俊何凤有李浩
吴轩钦, 谭国俊, 何凤有, 李浩
(中国矿业大学信息与电气工程学院,江苏徐州221116)
0 引言
电励磁同步电机相比于异步电机、永磁同步电机在功率因数、控制精度、弱磁比、过载能力等方面有其自身的优势,广泛应用于矿井提升机、轧钢机、船舶推进器等大功率传动场合[1-8],在高性能驱动领域发挥着重要的作用。高性能的交流电机矢量控制变频传动系统一般需要在转子轴上安装编码器检测速度及转子位置进行闭环控制,编码器的使用增加了电机与控制系统的电缆连接和接口电路,导致编码器信号及控制系统易受到干扰,降低了系统的可靠性,同时机械式传感器容易受温度、湿度及振动的影响,无法应用于一些特殊场合[9-14]。对此,国内外学者开展了无速度传感器交流传动系统的研究。研究主要针对异步电机和永磁同步电机[13-17],对于电励磁同步电机的无速度传感器控制极少涉及。目前,适用于电励磁同步电机转子位置和速度估算方法主要有:①电机反电动势估算法;②模型参考自适应(MRAS)方法;③高频信号注入法。
文献[15]通过反电动势估算转子位置和速度,结构简单,易于实现。该方法存在磁链圆偏心现象,当电机运行频率很低时偏心现象尤其明显,甚至在高速运行时磁链轨迹偏移现象依旧存在。适用于控制性能要求不高的场合。
文献[16]采用模型参考自适应方法辨识转子位置、速度。该方法的估计精确度与参考模型的选取密切相关。若要准确辨识转子位置和速度,必须提高作为参考模型的电压模型的运算速度,以克服电压模型积分初始值等问题。
文献[15]、[16]所提的辨识方法均对电机参数比较敏感,对此文献[17]采用基于转子高频电压信号注入的位置和速度辨识算法。但对于变频控制系统,通过PWM调制的定子电压混杂着与开关频率相关的特征谐波,增加高频信号提取滤波器的设计难度,导致辨识精确度降低。
针对上述辨识方法存在的问题,本文在高频信号注入辨识方法基础上,对比分析了电励磁同步电机定、转子绕组分别注入高频电压信号时,利用包含转子位置信息的感应电流信号辨识转子位置方法。在此基础上,提出了对电机参数具有较强鲁棒性的定子q轴高频电压注入,提取转子感应的高频电流信号进行转子位置和速度辨识方法。
本文的基本架构如下:第一部分介绍电励磁同步电机数学模型;第二部分详细分析电励磁同步电机高频信号注入转子位置辨识方法;第三部分为基于dSPACE平台实验实施及结果分析;第四部分给出了全文研究结论。
1 电励磁同步电机数学模型
所研究的具有阻尼绕组电励磁凸极同步电机基本模型示意如图1所示[1,6-7]。转子励磁绕组轴线为直轴(d轴),与其正交的轴线为交轴(q轴),阻尼绕组等效为d轴和q轴两个绕组。下文建立的电励磁同步电机数学模型的假设条件为:(1)定子三相绕组在空间对称分布,气隙磁势和磁通密度空间正弦分布;(2)忽略磁路饱和及铁心损耗;(3)忽略温度对电动机参数的影响;(4)采用电动机惯例设定正方向。(5)对文中物理量做如下规定,u、i、ψ、R、L 分别表示电压、电流、磁链、电阻和电感;σ代表漏磁量;下标s、m、f、D、Q分别表示定子、气隙、励磁、阻尼绕组;下标A、B、C表示ABC坐标系下的分量;α、β表示αβ坐标系下的分量;d、q表示dq坐标系下的分量;ωr为转子电气角速度;θr为转子位置角;上标表示观测量。
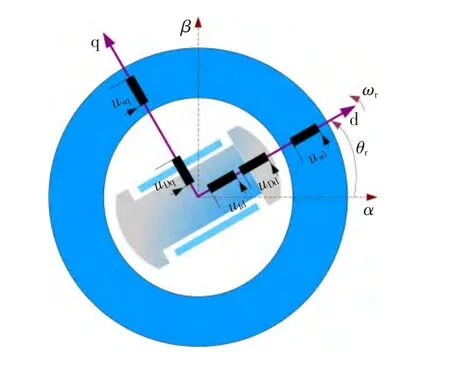
图1 电励磁凸极同步电机模型示意Fig.1 Model schemes of the electrically excited salient pole synchronous motor
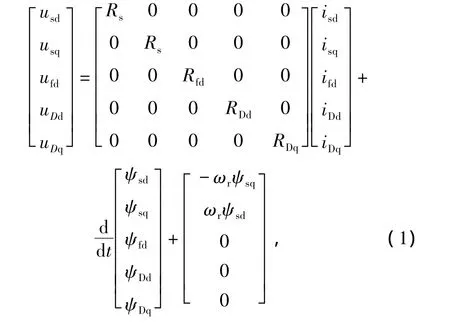
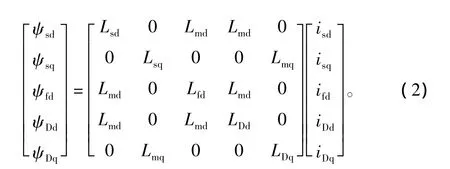
在坐标系中,定子d、q轴绕组与转子绕组同步旋转,如式(1)、式(2)所示的电励磁同步电机电压、磁链数学模型为常微分线性方程组[1,7]。
2 基于高频信号注入转子位置角辨识分析
由式(1)、式(2)可得电机静止状态(ωr=0)下的电压方程为

通过对定子绕组注入一个幅值为UHF、角频率为ωHF的高频电压激励信号,并有ωHF远大于电机基波角频率ωe,则式(3)中关于高频信号的电流响应将以电感项为主导,电阻压降可忽略,式(3)可简化为
由式(4)可得高频感应电流表达式为

从式(5)可以看出,由于阻尼绕组两端短路,无法注入高频电压信号,因此可有转子绕组和定子绕组d、q轴注入高频电压信号三种方式。结合图2所示的注入频率为500 Hz高频信号后定、转子电流频谱对比图可知:第一种方法,在转子绕组注入高频电压信号,定子d轴感应高频电流信号,但对于采用变频控制的电励磁同步电机调速系统,定子电流的快速控制会阻碍定子高频感应电流信号的出现,同时定子电流混杂着大量不同频率的特征谐波,如图2(a)所示,导致高频信号提取滤波器的设计难度增加,降低辨识精确度。第二种方法,与永磁同步电机高频注入辨识算法相同,在定子d轴绕组注入高频电压信号,利用定子q轴感应高频电流信号=0进行转子位置辨识,但同样存在有效信号提取困难问题。
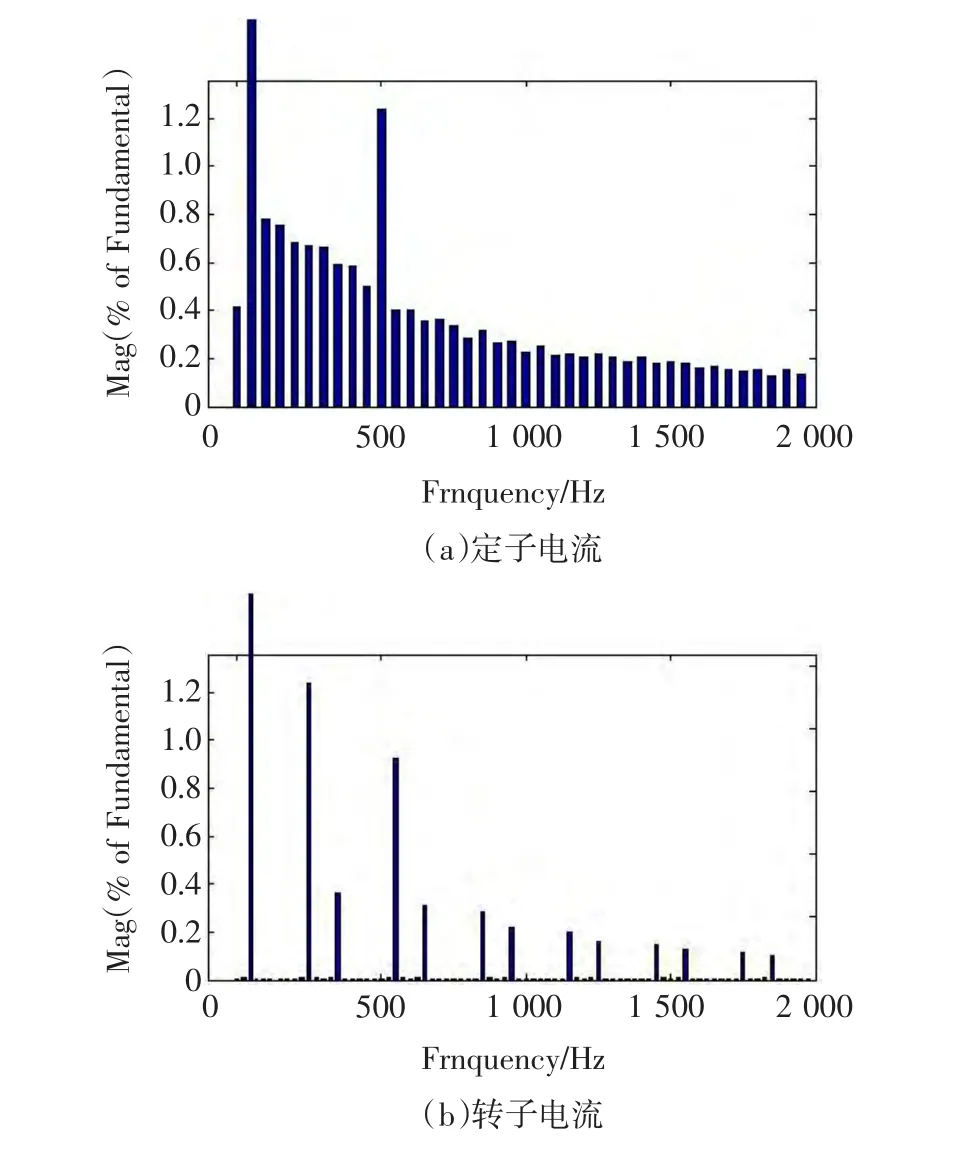
图2 注入高频信号后定、转子电流频谱对比图Fig.2 Stator and rotor current spectrum comparison chart after the injection of high-frequency signal

由上述分析可知,定子q轴注入高频电压信号,转子电流特征谐波分布相对单一,可降低高频感应电流提取滤波器设计难度,有利于转子位置信息的快速提取,提高辨识精确度。
如图3所示,假设真实的转子位置角为θr,估计的转子位置角为,定义变量=θr-为两者之间的角度差。误差角度的Park变换矩阵为


其中,


图3 转子高频感应电流与误差角关系Fig.3 Relationship between high-frequency induction current and error angle in motor


采用式(11)所示的软件锁相环[18](SPLL)可辨识转子位置角、电机速度。

式(12)中,Q为陷波器的品质因数。
图4为取Q=100时陷波器幅频特性图。从图中可以看出,陷波器对角频率为1 904 rad/s的信号增益接近-150 dB。转子电流的直流分量和高频信号分量的角频率均远离陷波角频率,陷波器对两者的增益等于1。从而降低了滤波延时对辨识精确度的影响程度,提高了系统的性能。
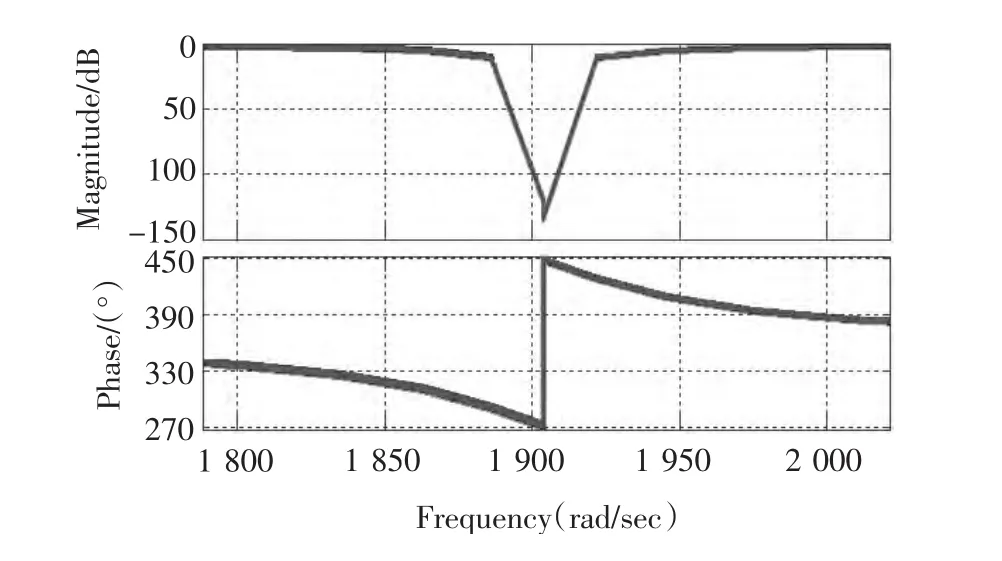
图4 陷波器幅频特性图Fig.4 Notch filter amplitude-frequency characteristic diagram
结合上述分析可得图5所示的基于定子q轴高频电压注入,通过提取转子感应的高频电流信号辨识转子位置角和转速的控制框图。

图5 所提的转子位置辨识控制框图Fig.5 The proposed rotor position identification control block diagram

图6 两种方式转子位置、速度辨识效果对比Fig.6 Simulation waveforms of rotor position identification and high-frequency signal extraction
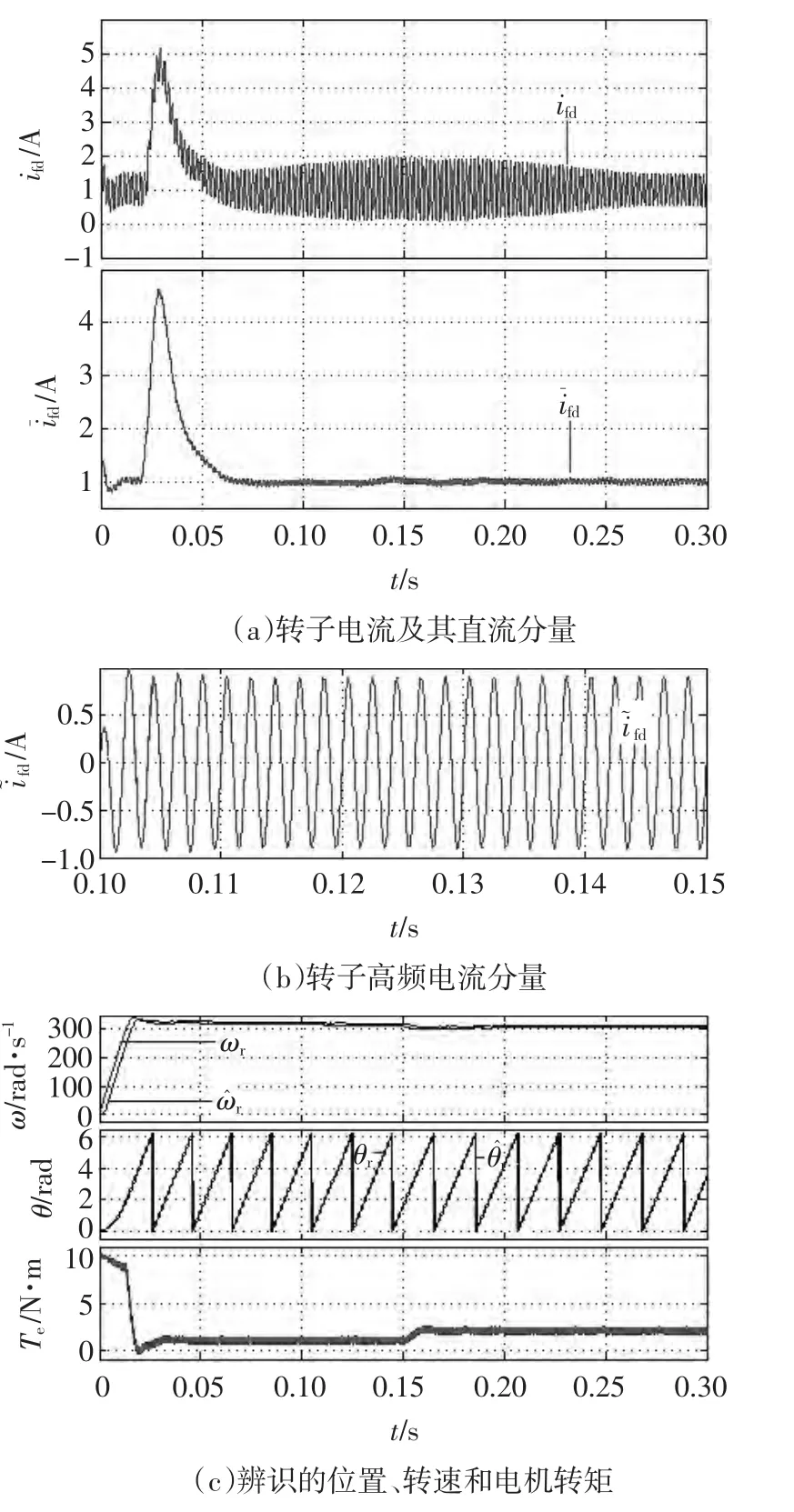
图7 转子高频信号提取及位置辨识仿真波形Fig.7 Simulation waveforms of rotor position identification and high-frequency signal extraction
图7 为所提的转子位置、转速辨识方法仿真波形。其中,图7(a)为转子电流ifd经过陷波器和低通滤波器综合信号处理后的直流分量¯ifd,图7(b)为转子绕组感应的高频信号,图7(c)为转子位置和速度辨识效果。由仿真结果可以看出,通过陷波器的引入,可设计截止频率的较高低通滤波器的,直流分量估计值迅速收敛到稳态,实现了电流高频分量和基频分量的快速分离,提高辨识收敛速度,实现转子位置及速度信号的快速跟踪。
3 实验实施及结果分析
为验证所提的电励磁同步电机转子高频电流信号提取无速度传感器控制方案的可行性和评估这种控制方式的性能,搭建了如图8所示的PWM功率变换器电励磁同步电机矢量控制系统实验平台,实验是建立在dSPACE1103实时控制系统基础上,系统控制框图如下图9所示。将MATLAB中基于电励磁同步电机定子高频脉振信号注入无速度传感器控制系统模型下载到DS1104核心处理器,实现速度跟踪控制、转子高频电流信号提取、转子位置及转速辨识、电流闭环控制、故障诊断等功能,实验中编码器反馈值只作为辨识量的验证,不作为控制参数。在实验实施过程中,利用dSPACE在线监视软件ControlDesk中的绘图仪在线实时显示所需变量值。

图8 电励磁同步电机实验平台Fig.8 Electronically excited synchronous motor experiment platform

图9 系统控制框图Fig.9 System control block diagram
定子q轴注入高频电压信号uHFsq频率为500 Hz,幅值为15 V,直流母线电压约为80 V,其注入电压的示波器测量波形如图10所示。
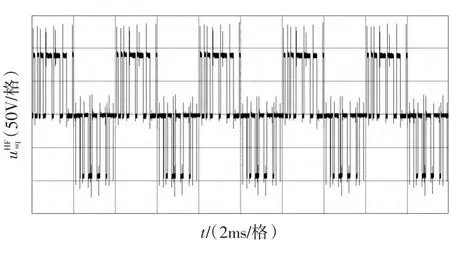
图10 高频电压波形Fig.10 High frequency voltage waveforms
3.1 低速段实验效果分析
图11 为电机运行角频率ωr=4πrad/s时提取的转子绕组高频电流信号以及辨识的转子位置角和编码器实测的转子位置角θr实验波形。从图中可以看出,转子高频电流信号采用本文所提的陷波器及低通滤波器处理,具有良好的滤波效果,提升了转子位置跟踪能力。
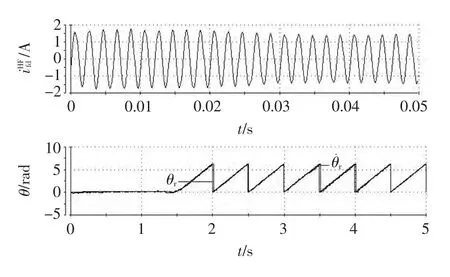
图11 低速段高频电流波形及转子位置辨识实验波形Fig.11 Experiment waveforms of High-frequency current and rotor position identification in low-speed segment
图12 为电机低速段突加负载实验波形。由图12(a)可以看出在负载变化过程中,定子电流响应迅速,电流无相位突变和振荡,系统具有良好的转矩特性。从图12(b)、(c)可知,在此过程中辨识的转子位置快速跟踪实际位置,跟踪性能优越。同时依据锁相环构建的转速估计器可精确反映出转速实际值,并且跟踪给定值。表明该方法能够实现于低速范围内的电励磁同步电机无速度传感器控制,具有良好的低速带载性能。
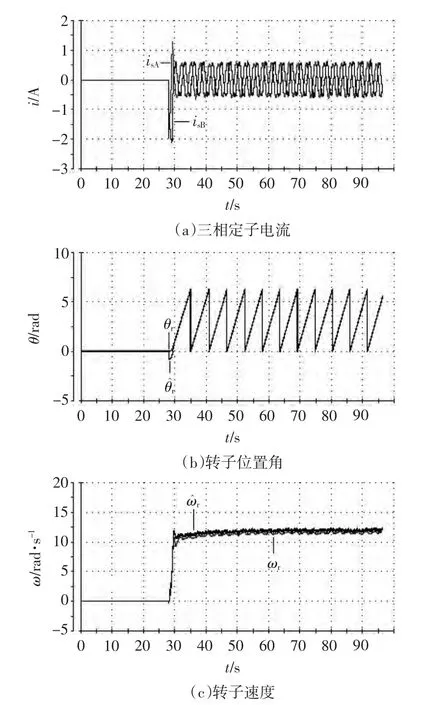
图12 低速段负载动态变化实验波形Fig.12 Experiment waveforms of dynamic oad changes
3.2 中、高速段实验效果分析
图13 、14为电机中、高速段无速度传感器实验波形。
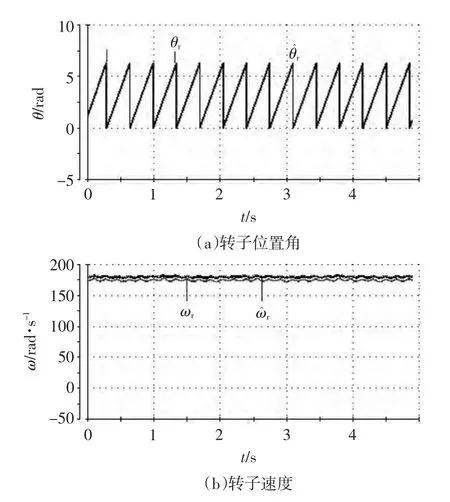
图13 中速段实验波形Fig.13 Experiment waveforms in the medium-speed segment
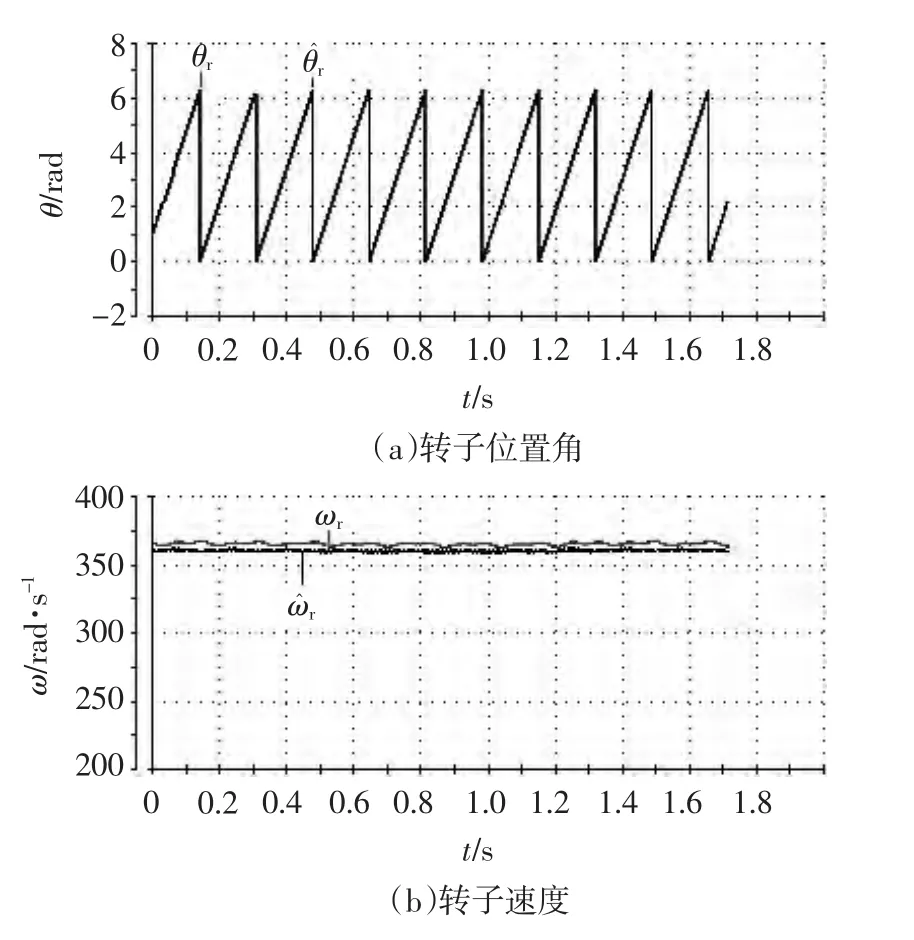
图14 高速段实验波形Fig.14 Experiment waveforms in the high-speed segment
4 结论
本文对所提出的定子q轴高频电压注入、转子高频电流提取的电励磁同步电机转子位置角、转速辨识方法进行了理论分析、仿真和实验研究。在此基础上提出了具有宽调速范围的电励磁同步电机无速度传感器控制方法。实验结果分析得出以下结论:
1)相比于其他高频信号注入-提取辨识方式,采用定子q轴高频电压注入,通过提取转子高频电流分量进行转子位置辨识方法滤波器设计简单,可提高辨识收敛速度,具有良好的辨识精确度。
2)采用本文所提的无速度传感器控制方法能够有效地检测转子位置,具有良好的低速性能,同时能快速响应负载的变化,具有优异的矩响应特性。
3)本文所提的控制方法概念清晰,算法简单,无需增加硬件成本。
[1]李崇坚.交流同步电机调速系统[M].科学出版社,2006.
[2]AMIN M A,BASSIOUNY M M.Synchronous motor vector control using multi-level inverter[C]//IEEE International Conference on industrial technology,Busan,Korea,2004,02:328-333.
[3]DASILVA K F,JACOBINA C B,et al.Vector control in synchronous machine drives[C]//IEEE International Conference on Industrial Electronics,Control and Instrumentation,Kobe,1991,10:177-181.
[4]PYRHONEN O,NIEMELA M,PYRHONEN J,et al.Excitation control of DTC controlled salient pole synchronous motor in field weakening range[C]//IEEE AMC’98-COIMBRA,1998,294-298.
[5]J LUUKKO,M NIEMELA,J PYRHONEN.Estimation of the flux linkage in a direct torque controlled drive[J].IEEE Transactions on Industry Applications,2003,50(2):283-287.
[6]J Kaukonen.Salient pole synchronous machine modeling in an industrial direct torque controlled drive application[D].Lappeenranta University of Technology,Finland,1999.
[7]谭国俊,吴轩钦,李浩,等.Back-to-Back双三电平电励磁同步电机矢量控制系统[J].电工技术学报,2011,26(3):36-43.TAN Guojun,WU Xuanqin,LI Hao,et al.Vector control system of electrically excited synchronous motor fed by back-to-back dual three-level converter[J].Transactions of China Electrotechnical Society,2011,26(3):36-43.
[8]吴轩钦,谭国俊,宋金梅,等.基于混合磁链观测器电励磁同步电机矢量控制[J].电机与控制学报,2010,14(3):62-67.WU Xuanqin,TAN Guojun,SONG Jinmei,et al.Electrically excited synchronous motor vector control based on hybrid airgap flux estimator[J].Electric Machines and Control,2010,14(3):62-67.
[9]SHAO Liwei,LIAO Xiaozhong,ZHANG Yuhe,Application of active disturbance rejection controller and extend state observer for PMSM[J].Transactions of China Electro technical Society,2006,21(6):35-39.
[10]秦峰.基于电力电子系统集成概念的PMSM无传感器控制研究[D].杭州:浙江大学电气工程学院,2006.
[11]Gheorghe-Daniel Andreescu,Cristian Ilie Pitic.Combined flux observer with signal injection enhancement for wide speed range sensorless direct torque control of ipmsm drives[J].IEEE Transaction on Energy Conversion,2008,23(2):393-402.
[12]Piippo A.Hinkkanen M.Luomi J.Analysis of an adaptive observer for sensorless control of interior permanent magnet synchronous motors[J].IEEE Transactions on Industrial Electronics,2008,23(2):393-402.
[13]Ion Boldea,Mihaela Codruta Paicu.Active flux DTFC-SVM sensorless control of IPMSM[J].IEEE Transactions on Energy Conversion,2009,24(2):314-322.
[14]Holtz,J.Sensorless control of induction machines-with or without signal injection?[J].IEEE Transactions on Industrial Electronics,2005,53(1):7-30.
[15]J HU,B WU.New Integration algorithms for estimating motor flux over a wide speed range[J].IEEE Transactions on Power Electronics,1998,13(5):969-977.
[16]Roberto Cárdenas,Rubén Pena,Jon Clare et al.MRAS observers for sensorless control of doubly-fed induction generators[J].IEEE Transactions on Power Electronics,2008,23(3):1075-1084.
[17]邓先明,马志勋,李新宇,等.转子注入高频的同步电机无传感器控制[J].电机与控制学报,2010,10(4):61-67.DENG Xianming,MA Zhixun,LI Xinyu,et al.Sensorless control of synchronous motor based on high-frequency signal injection into the rotor[J].Electric Machines and Control,2010,10(04):61-67.
[18]洪小圆,吕征宇.基于同步参考坐标系的三相数字锁相环[J].电工技术学报,2012,27(11):203-210.HONG Xiaoyuan,LÜ Zhengyu.Three-phase digital phase-locked loop based on synchronous reference frame[J].Transactions of China Electrotechnical Society,2012,27(11):203-210.
[19]续艳珍.电网电压不平衡时三相PWM整流器控制策略的研究[D].山东大学硕士学位论文.2005.