基于LSSVM的多输入多输出开关磁阻电机建模
2015-01-25徐宇柘曹彦萍钟锐
徐宇柘, 曹彦萍, 钟锐
(1.山东省海洋环境监测重点实验室,山东青岛266001;2.山东省科学院海洋仪器仪表研究所,山东青岛266001;3.东南大学国家专用集成电路系统工程技术研究中心,江苏南京210096)
0 引言
作为一种无需稀土材料的无刷直流电机,开关磁阻电机(SRM)具有结构简单、转矩大、成本低等突出特点,并在宽广的速度和功率范围内都能保持较高效率[1]。近年来,随着稀土资源的日益减少,永磁无刷电机成本日益上升,SRM已逐渐引起电动车行业的重视[2-3]。
精确的SRM模型是电动车应用研究与控制的基础。但是由于SRM定转子的双凸极结构,使其呈现出高度非线性及多变量耦合的特点,因此,使用传统建模方法很难得到精确的电机模型。随着智能技术的不断成熟,神经网络不断应用于开关磁阻电机建模中[4-6],作为智能控制技术的一种,神经网络具有很强的非线性映射能力,无需知道模型的任何先验知识,而是利用实际可测量的输入输出来辨识模型,使得所建模型具有很强的自适应性和鲁棒性[7]。然而神经网络存在所需样本大、局部极小点、过学习以及结构和类型的选择过分依赖于经验等固有缺陷。支持向量机[8](SVM)是Vapnik在统计学习理论基础上提出的一种新型机器学习方法,它基于结构风险最小化,具有严格的数学依据,为解决小样本问题提供了很好的解决方案,并能有效避免神经网络上述缺陷。文献[9]利用支持向量机建立转子位置预测模型,能准确预测转子位置,实现了SRM的无位置传感器控制。最小二乘支持向量机由于在损失函数和等式约束条件上的修正,较之标准的 SVM算法,在快速上有了很大提高。文献[10]建立了LSSVM速度控制器并代替原始PI控制器,实现了开关磁阻电机的快速准确调速。在SRM建模方面,文献[11-12]利用LSSVM分别建立了基于自感特性及矩角特性的SRM模型,并通过实测证明建模方法的正确性和有效性,克服了神经网络建模过学习和训练速度慢的缺点;文献[13]利用LSSVM建立了基于磁链特性的SRM模型,避免了神经网络建模局部极小点、过学习和过分依赖经验等固有缺陷,并分析了LSSVM方法在小样本建模方面的优势。
本文基于SRM磁特性,采用LSSVM方法建立多输入多输出开关磁阻电机模型。与以上最小二乘支持向量机SRM建模相比在结构上进行改进,以进一步提高模型精确度。给出样本数据获取方法以及核参数的优化方法,训练多输入多输出LSSVM模型,并分析其在精确度上的优势,搭建基于LSSVM的多输入多输出SRM仿真模型,并将仿真结果和实测结果对比,验证该建模方法的正确性。
1 LSSVM基本原理
支持向量机基于结构风险最小化理论,将低维空间非线性样本经过核函数映射为高维空间中的线性样本,从而降低求解复杂性。其基本原理如图1所示。
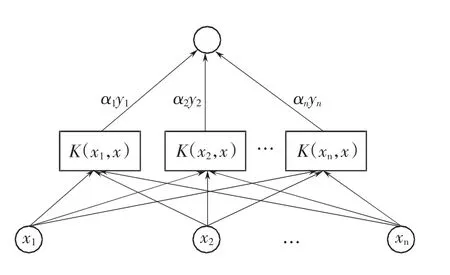
图1 支持向量机基本原理图Fig.1 Basic schematic of support vector machine
最小二乘支持向量机是支持向量机的一种改进,它是将传统支持向量机中的不等式约束改为等式约束,且将误差平方和损失函数作为训练集的经验损失,从而把解二次规划问题转化为求解线性方程组问题,提高了求解问题的速度和收敛精确度。
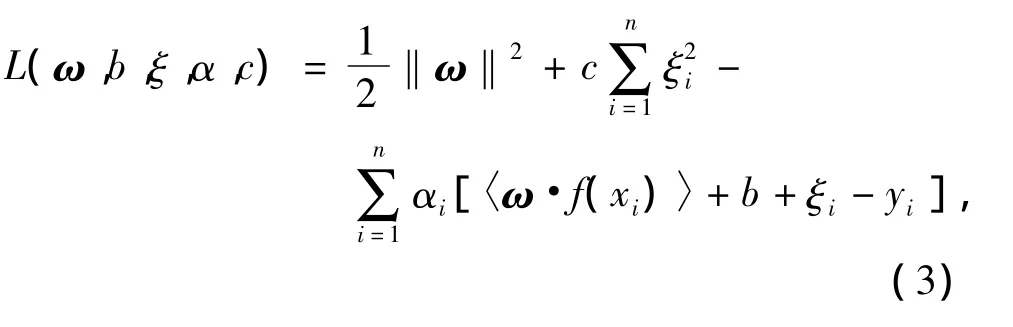
给定非线性系统的n个输入输出样本数据集(xi,yi),i=1,…,n(其中 xi∈Rd为输入变量,yi∈R为期望值,d为自变量维数)。根据这些样本用支持向量机来建立该系统的非线性模型。首先通过一个非线性变换x→φ(x),将输入空间的样本点xi映射到一个高维的特征空间(Hilbert空间);而后在该特征空间进行线性建模,构造最优决策函数

式中:ω为权重向量,ω∈Rd;b为阈值,b∈R;<·>表示向量内积。
利用Vapnik结构风险最小化原则,寻找ω,b是优化以下问题

式中,ζi为松弛因子,c为正则化参数,用拉格朗日法求解优化问题
式中,αi≥0为拉格朗日乘子。对式(3)求极值,令

解得

消去ω和ξ,得

式中:y=[y1,…,yn]T;

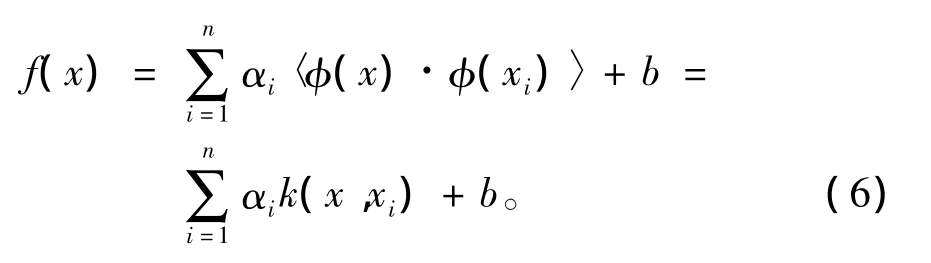
用最小二乘法求解式(5),求出α和b,得到用核函数表示的非线性系统模型为
2 基于LSSVM的开关磁阻电机建模
2.1 样本数据的获取
最小二乘支持向量机模型输入为角度(θ)、磁链(ψ),输出为电流(i)、转矩(T)及磁链对角度的偏导(∂ψ/∂θ),如图 2 所示。其中,输出∂ψ/∂θ是为了仿真中方便求解反电动势。

图2 SRM多输入多输出LSSVM模型Fig.2 MIMO LSSVM model of SRM
实验样机的额定参数为:12/8极,额定功率500 W,额定转速3 600 r/min,额定转矩1.1 N·m。
电机的电压方程[14-15]为

由式(7)可推出磁链方程得

磁共能方程

由式(9)推出转矩方程

因此,采用以下方法获取样本数据:固定角度,利用改进的DC脉冲法[16]得到测量电压、电流,由式(8)计算出磁链,得到角度-电流-磁链数据,此改进DC脉冲法能有效消除损耗影响,测量结果更准确;然后由三次样条插值求导[17]得到(∂ψ/∂θ)数据,再由式(9)和式(10)经三次样条积分和求导求得转矩,得到角度-电流-转矩数据。
2.2 LSSVM和参数选择
核参数的选取对LSSVM模型的精确度有很大的影响,由于开关磁阻电机的高度非线性及多变量耦合特点,本文选取非线性映射能力强,误差小的RBF核函数,基本形式为

且RBF核参数相对较少,更适用于SRM建模。该核函数有两个参数需要确定,校正因子γ和核宽度系数σ。采用交叉验证与凑试法结合的方法选取最优参数对[18]。
首先用交叉验证法寻优,进行几次后,选取训练点误差最小的两个参数值作为初始优化值,并统计参数的变化趋势对误差大小的影响。
然后在确保训练点误差较小的前提下,分别以初始值为中心,根据以上总结的趋势适当缩放参数的值,最后选取使得训练点误差最小的一组参数值为最终优化值。其中,误差分为两种形式,一种是最大绝对误差,定义如式(12);另一种是均方根误差,定义如式(13)。其中,yri为实测样本值,ypi为LSSVM预测的值。

2.3 LSSVM模型训练
最后确定最优参数对为(γ,σ):γ=[10000 10500 22000];σ =[0.1 0.06 0.12]。图 3 和图4分别是训练好的多输入多输LSSVM模型仿真得到的转矩与磁链特性曲线[18-20],可看出训练曲线与样本点吻合度很高。
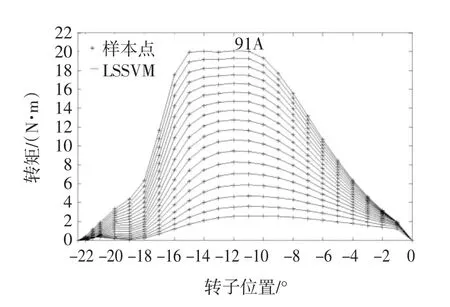
图3 LSSVM模型仿真得到的转矩特性曲线Fig.3 Torque curves based on LSSVM model simulation
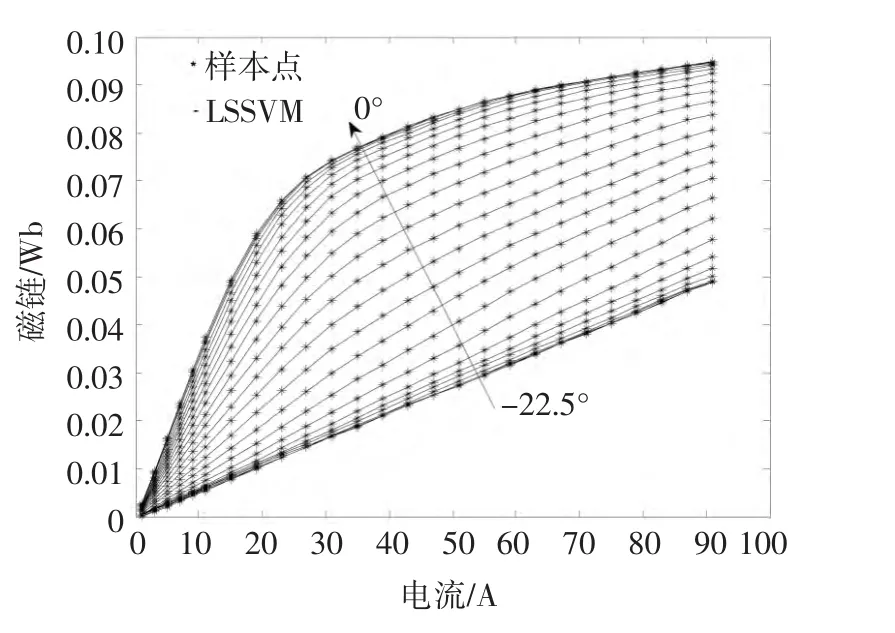
图4 LSSVM模型仿真得到的磁链特性曲线Fig.4 Magnetization curves based on LSSVM model simulation
2.4 多输入多输出LSSVM模型与多输入单输出LSSVM模型比较
LSSVM建模相对于神经网络建模的优势在文献[12]和文献[13]中已经明确阐述并得到验证,这里不再阐述。但是,这些LSSVM开关磁阻电机模型都是基于单输出LSSVM,文献[12]中SRM模型由两个单输出LSSVM模型矩角模型和自感模型组合而成,这很容易造成累积误差,降低模型的精确度甚至是速度。为了验证本文建立的多输入多输出LSSVM模型的优势,建立并优化了多输入单输出(MISO)LSSVM模型,和图2中多输入多输出模型相对比,如图5所示。

图5 SRM多输入单输出LSSVM模型Fig.5 MISO LSSVM model of SRM
表1为两种方法建模结果对比,其中,εm和εr分别为输出转矩的为最大绝对误差和均方根误差,t为训练时间。

表1 多输出与单输出LSSVM建模性能指标对比Table 1 Comparison of performance between multi-output and single-output LSSVM models
由表1可以看出多输出LSSVM模型的均方根误差、最大绝对误差和训练时间均小于单输出的LSSVM模型。且文献[12]中模型转矩的最大绝对误差和均方根误差分别为3.5e-4和8.7e-4也大于本文的多输出模型。由此可见,由于设计成多输入多输出,能更好的适应SRM各参数间的强耦合性,避免了上述单输出模型组合而产生的累积误差,不仅稍微加快了模型速度而且使得模型精确度更高。
2.5 基于多输入多输出LSSVM的SRM系统模型的建立
在Matlab的SIMULINK中建立系统的仿真模型,包括功率变换模块、控制模块和电机本体模块,这里只讨论电机本体模块仿真模型的建立。仿真模块中用S函数实现磁链计算、LSSVM预测、反电动势计算及电感计算。经S函数封装后模块输入为角度、磁链、角速度,输出为电流、转矩、反电动势和电感。SIMULINK仿真原理框图如图6所示。
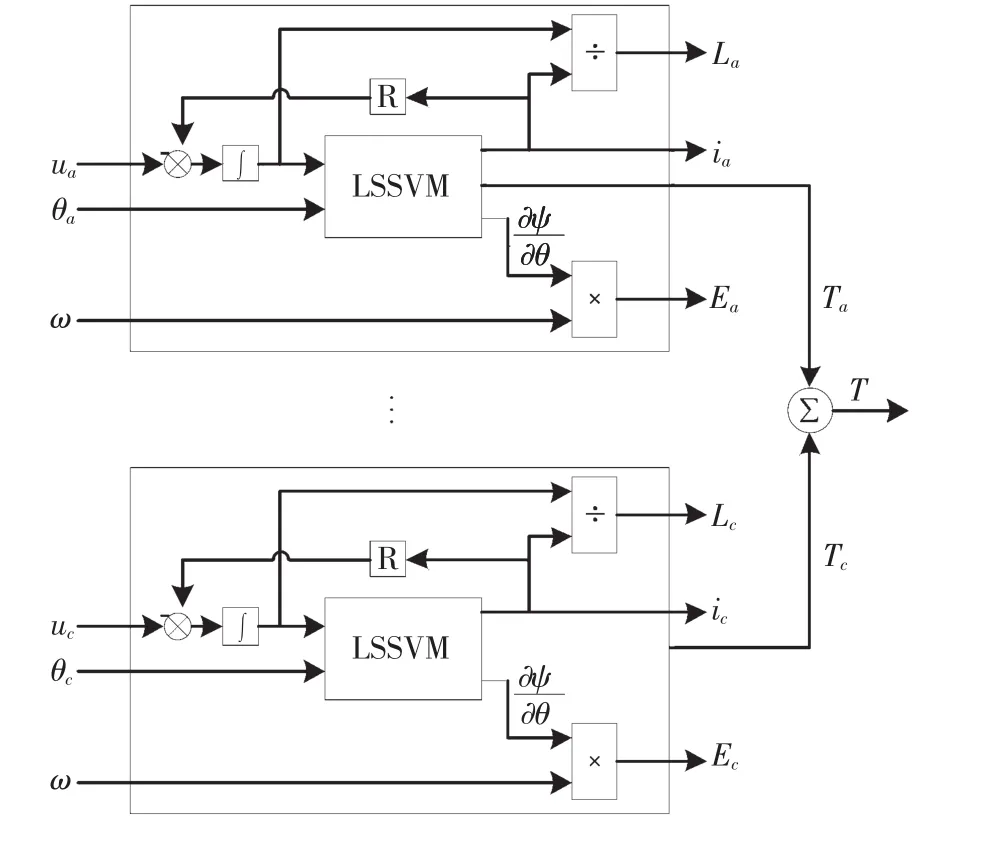
图6 SRM本体simulink仿真原理Fig.6 The simulation block diagram of SRM body in simulink
反电动势由式(14)得出,电感由式(15)得出。
3 仿真与实测验证
为了验证本文建模方法的正确性,将仿真结果和SRM调速系统实验平台实测结果进行了对比,设置相同的工况:直流供电电压48 V,负载2.75 N·m,控制方式APC,斩波限90 A,A相开通角-3.293 7°,关断角12.958 1°。仿真A相电流和实测A相电流分别如图7和图8所示。
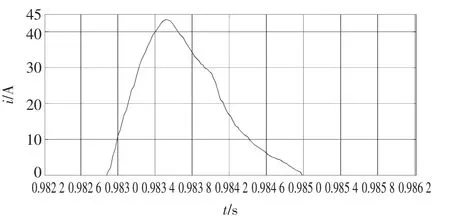
图7 仿真得到A相电流波形Fig.7 Current waveform of phase A obtained by simulation
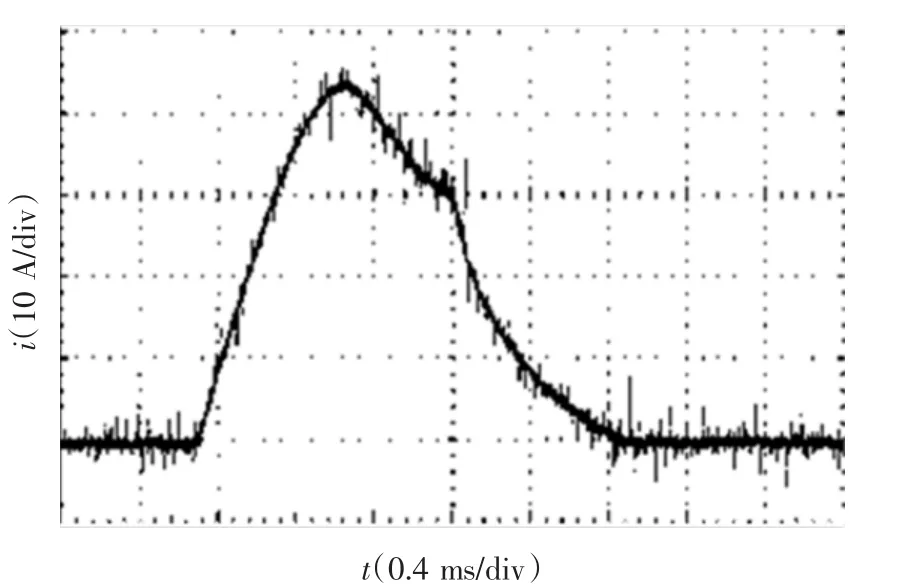
图8 实测A相电流波形Fig.8 Current waveform of phase A obtained by experimental measurement
仿真与实测对比结果如表2所示。

表2 仿真与实测A相电流结果对比Table 2 Comparision of results by simulation and experimental measurement
由上两图和表2可以看出,仿真和实测电流相比不仅波形吻合性很好,而且能够保持较小的误差,这充分说明了本文所述的基于最小二乘支持向量机的多输入多输出开关磁阻电机建模方法的正确性和可行性。
4 结论
本文基于最小二乘支持向量机建立了SRM的非线性多输入多输出模型,训练精确度进一步提高,避免了以往最小二乘支持向量机建模方法产生的累积误差;并且仿真和实测结果验证了此建模方法的准确性和有效性,对开关磁阻电机非线性建模来说具有很大的应用价值。此模型精确度可通过优化核函数进一步提高,是下一步研究的重点。
[1]SOARES F,BRANCO P J C.Simulation of a 6/4 switched reluctance motor based on Matlab/Simulink environment[J].IEEE Transactions on Aerospace and Electronic,2001,37(3):989-1009.
[2]SPONG M,PERESADA S,TAYLER D.Feedback linearizing control of switched reluctance motors[J].IEEE Transactions on Automatic Control,1987,32(5):371 -379.
[3]KRISHNAN R.Switched reluctance motor drives:modeling,simulation,analysis,design,and applications[M].New York:CRC Press,2001:1 -25.
[4]ELMAS C,SAGIROGLU S,COLAK I,et al.Modeling of a nonlinear switched reluctance deriver based on artificial neural networks[C]//Proceedings of Fifth International Conference on Power Electronics and Variable-Speed Drivers,October 26 - 28,1994,London,UK.1994:7-12.
[5]CAI Jun,DENG Zhiquan,LIU Zeyuan.Nonlinear Modeling of Switched Reluctance Motor Using Different Methods[C]//Applied Power Electronics Conference and Exposition(APEC),2010 Twenty-Fifth Annual IEEE,Feb 21 -25,2010,Palm Springs,CA,USA.2010:1018-1025.
[6]蒯松岩,张旭隆,王其虎,等.开关磁阻电机神经网络无位置传感器控制[J].电机与控制学报,2011,15(8):18-22.KUAI Songyan,ZHANG Xulong,WANG Qihu,et al.Position sensorless control of SRM using neural network [J].Electric Machines and Control,2011,15(8):18 -22.
[7]高隽.人工神经网络原理及仿真实例[M].北京:机械工业出版社,2003:1-50.
[8]CRISTIANINI Nello,TAYLOR John Shawe著,李国正,王猛,曾华军译.支持向量机导论[M].北京:电子工业出版社,2004:1-50.
[9]HE Ziming,XIA Changliang,ZHOU Yana,et al.Rotor Position Estimation for Switched Reluctance Motor Using Support Vector Machine[C]//Control and Automation,2007,ICCA 2007,May 30-June 1,2007,Guangzhou,China.2007:1683-1687.
[10]ZHOU Jie,LI Hui,SUN Yongkui.Variable Speed Control in Switched Reluctance Drive Based on Least Square-Support Vector Machine[C]//Mechatronics and Automation,2008,ICMA 2008,Aug 5-8,Takamatsu,Japan.2008:792-796.
[11]QU Bingni,SONG Jiancheng,JIA Huiyong,et al.Nonlinear Modeling of Switched Reluctance Machine[C]//Electrical Ma-chines and Systems(ICEMS 2011),Aug 20-23,2011,Beijing,China.2011:1 -4.
[12]宋建成,郑建斌,曲兵妮,等.开关磁阻电机的最小二乘支持向量机建模与仿真[J].电机与控制学报,2010,14(5):32-36.SONG Jiancheng,ZHENG Jianbin,QU Bingni,et al.Modeling and simulation for switched reluctance motor based on least squares support vector machine[J].Electric Machine and Control,2010,14(5):32 -36.
[13]司利云,林辉,刘震.基于最小二乘支持向量机的开关磁阻电机电动机建模[J].中国电机工程学报,2007,27(6):26-30.SI Liyun,LIN Hui,LIU Zhen.Modeling of switched reluctance motors based on LS-SVM[J].Proceedings of the CSEE,2007,27(6):26-30.
[14]王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,1999.
[15]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
[16]CARSTENSEN C E,FUENGWARODSAKUL N H,DE DONCKER,R W.Flux Linkage Determination for Correct Modeling of Switched ReluctanceMachines-DynamicMeasurementversus Static Computation[C]//Electric Machines& Drives Conference,IEMDC 2007,May 3 -5,2007,Antalya,Turkey.2007:1317-1323.
[17]丁文,梁得亮,鱼振民,等.基于磁链与转矩特性的开关磁阻电机建模研究[J].西安交通大学学报.2007,41(2):214-218.DING Wen,LIANG Deliang,YU Zhenmin,et al.Modeling for switched reluctance motor based on flux linkage and torque characteristics[J].Journal of Xi’an Jiao Tong University,2007,41(2):214-218.
[18]陈帅,朱建宁,潘俊,等.最小二乘支持向量机的参数优化及其应用[J].华东理工大学学报:自然科学报,2008,34(2):278-282.CHEN Shuai,ZHU Jianning,PAN Jun,et al.Parameters optimization of LS-SVM and its application[J].Journal of East China University of Science and Technology:Natural Science Edition,2008,34(2):278-282.
[19]王晶,靳其兵,曹柳林.面向多输入多输出系统的支持向量机回归[J].清华大学学报:自然科学报,2007,47(S2):1737-1741.WANG Jin,JIN Qibing,CAO Liulin.Support vector machine algorithm for multi-input multi- output systems[J].Journal of Tsinghua Univ:Sci&Tech,2007,47(S2):1737 -1741.
[20]郭小荟,马小平.基于Matlab的支持向量机工具箱[J].计算机应用与软件,2007,24(12):57-59.GUO Xiaohui,MA Xiaoping.Support vector machines toolbox in matlab environment[J].Computer Application and Software,2007,24(12):57-59.