三相电压型PWM整流器双开关表直接功率控制策略研究
2015-01-25姚绪梁王旭马赫
姚绪梁, 王旭, 马赫
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
0 引言
自20世纪90年代以来,三相电压型PWM整流器因其具有交流侧电流低谐波、单位功率因数、能量双向流动及恒定直流电压控制等优点,在各个领域得到了广泛的应用。如静止无功补偿(SVG)、有源电力滤波(APF)、统一潮流控制(UPFC)、超导储能(SMES)、高压直流输电(HVDC)、电气传动(ED)、新型UPS以及太阳能、风能等可再生能源的并网发电等。三相电压型PWM整流器的控制策略有很多,如:直接功率控制、直接电流控制、间接电流控制、反馈线性化控制等[1-2]。
三相电压型PWM整流器直接功率控制策略(DPC),采用功率内环、电压外环的双闭环结构,通过开关表控制有功功率与无功功率的变化,给定无功功率为零,达到控制直流输出电压和单位功率因数运行的目的[3-4]。由于直接功率控制与直接电流控制相比,算法和系统结构简单、动态性能好、不受坐标变换影响,因此逐渐成为国内外学者研究的热点。
本文对传统开关表进行改进,采用了三电平滞环比较器,并且增加开关表矢量对于有功功率和无功功率的幅度控制,设计快速开关表和慢速开关表两个开关表。开关表选择器根据当前滞环选择器输出Sp的值和幅度控制Cp的值选择快速或慢速开关表进行控制。与传统DPC控制方法相比较,本文所提控制方法消除了无功功率失控区,改善了系统的动态性能。仿真和实验结果均验证了本方案的正确性和有效性。
1 三相电压型PWM整流器DPC系统
1.1 三相电压型PWM整流器数学模型
三相电压型PWM整流器主电路图如图1所示。
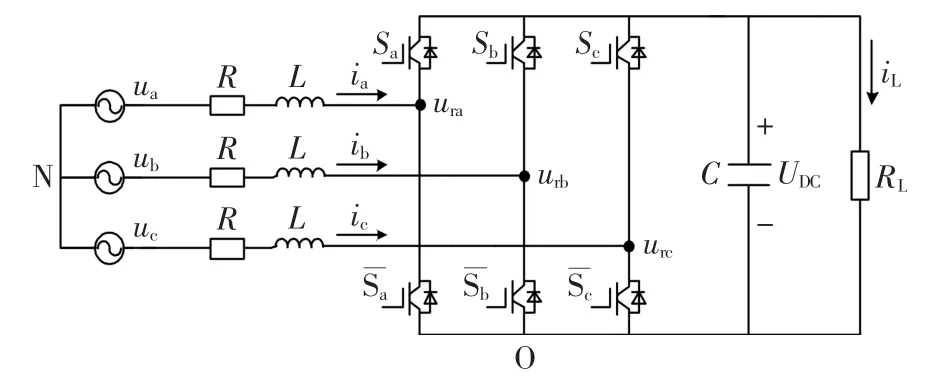
图1 三相电压型PWM整流器主电路Fig.1 Topology of the three-phase voltage source PWM rectifier topology
其中,ua、ub、uc是三相对称电压源,ia、ib、ic是三相线电流,L是滤波电感,R是桥路等效电阻。C为直流侧电容,ura、urb、urc为整流器输入相电压,UDC是直流侧电压,UDC是直流侧电阻,iL是负载电流。Sa、Sb、Sc为整流器的开关函数。S=1,代表上桥臂开通,下桥臂关断;S=0,代表上桥臂关断,下桥臂开通。
根据基尔霍夫第二定律,由图1可得:
式中,Ura=SauDC+uON,Urb=SbuDC+uON,Urc=ScuDC+uON。uON是下桥臂节点O与电源中性点N之间的电压。对于三相对称系统,电压之和、电流之和为0。因此可得

对直流侧应用基尔霍夫第一定律,可得:

根据瞬时功率理论,i是整流器输入电流矢量,u是电压空间矢量,id是i的有功分量,iq是i的无功分量,将u和i用复数来表示为:
由式(4)得到整流器的有功功率和无功功率:

假设电压空间矢量和同步旋转坐标系的d轴重合,此时uq=0,所以:

由式(6)可知,电网电压矢量在d轴投影为一常数,控制id就能实现对p的控制,且id增加时p增加;控制iq就能实现对q的控制,且iq增加时q减少。这就是开关状态Sa、Sa、Sc选择的依据。
1.2 传统DPC系统
DPC控制系统包括直流电压外环、功率内环结构;主电路由交流电压、电流检测电路和直流电压检测电路、滤波电抗器、开关管、直流电解电容器和负载组成。传统DPC控制方法为根据检测到的电流ia、ib、ic及 ua、ub、uc经坐标变换得到两相坐标系下的电压 uα、uβ和电流 iα、iβ,然后得到瞬时有功和无功功率的估算值p、q,p和q与给定的pref和qref比较后的差值信号送入功率滞环比较器得到Spq开关信号,扇形θ划分由uα和uβ确定。pref由直流电压外环PI调节器的输出(代表电流)与直流电压的乘积设定,根据Sp、Sq、θn在开关表中选择所需的驱动信号去驱动主电路开关管[5-8]。
传统直接功率控制策略为了优化整流器性能,将平面分为12个扇区。由uα、uβ确定u的幅角θ=arctg,根据θ确定u的位置。θ由式(7)确定

开关表采用二电平滞环比较器,得到Sp、Sq的两种状态0或1。0代表p或q需要减小,1代表p或q需要增加[9-12]。传统开关表如表1所示。

表1 传统开关表Table 1 Traditional switch table
基于Matlab/SIMULINK搭建了DPC控制系统的仿真模型。从仿真的结果来看,无功功率存在周期性的波动,也就是无功功率的失控区,引起交流侧电流畸变。
这是传统开关表造成的,因为传统开关表为了使有功功率增加,选用了大量零矢量,虽然这样降低了开关频率。但根据瞬时功率理论,选择零矢量u-Ui在iq轴的投影大小为零,所以零矢量对于无功功率增减不能调节。因为传统开关表在Sp=1的时候用了6个非零矢量,18个零矢量,所以系统对于无功功率的调节能力差,使无功功率出现了失控区。因为失控区存在,无功功率不能稳定在0的周围,系统不在单位功率因数下运行,所以交流侧交流电流在对应位置会出现畸变。为了消除无功功率失控区,本文提出了一种改进的直接功率控制策略,建立了新的开关表,并且采用双开关表调节,其结构如图2所示。
2 改进的DPC系统
2.1 三电平滞环比较器
传统的开关表采用两电平滞环比较器,Sp、Sq的状态只有0和1两种。设定有功功率滞环的阈值为HP,Δp=pref从大于0的阶段减小到-HP~0之间时,由于滞环输出的结果还是1,所以有功功率的调节向增加有功功率的方向,一直到Δp小于-HP滞环比较器才会输出0,使有功功率减小。开关频率高的时候对于系统的影响小一些,如果开关频率低就会产生严重的超调,这也是无功功率出现失控区的原因之一。
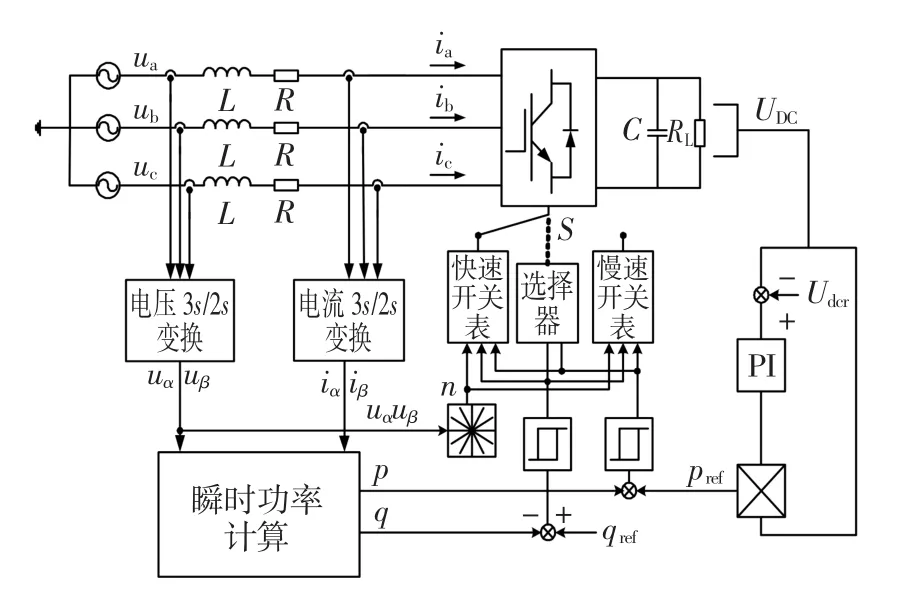
图2 改进DPC系统结构Fig.2 Improved DPC system structure
对此,本文有功功率采用三电平滞环比较器,输出-1、0、1三种状态。滞环比较器输出的结果如下:

在引入三电平滞环比较器的同时还增加了对于有功功率与无功功率控制幅度的调节。式(8)中,当Δp<-HP时,即实际有功功率超过给定功率,则需要快速减小到接近给定功率的大小值附近;当-HP<Δp<HP时,实际有功功率与给定功率之间相差不多,所以让有功功率较慢的增加或者减少到给定功率的附近;当Δp>HP时,实际有功功率比给定功率小的多,需要快速增加有功功率到给定功率的大小值附近。
2.2 开关表的构造
首先,分析开关矢量对于瞬时有功功率与无功功率的作用。假设电源电压矢量u处于第一扇区,各开关矢量对有功功率与无功功率的作用如图3所示。
如图3所示,设id轴与电压矢量u同向,iq轴垂直于id轴。由于各开关矢量大小都是一致的,其对有功功率与无功功率的作用效果只与u-Ui矢量在id轴与iq轴的投影大小有关。由式(6)可知,若在id轴的投影与id同向,则使有功功率增加,反之使有功功率减小;若在iq轴上的投影与iq同向,则使无功功率减小,反之使无功功率增加。根据图3可知,U4、U5、U6都使无功功率减小,U1、U2、U3都使无功功率增加,且随着u-Ui与iq轴夹角变小,控制幅度增大。同理,U1、U6都使有功功率减小,U2、U3、U4、U5都使有功功率增加,且随着u-Ui与id轴夹角变小,控制幅度增大。总结如表2所示。
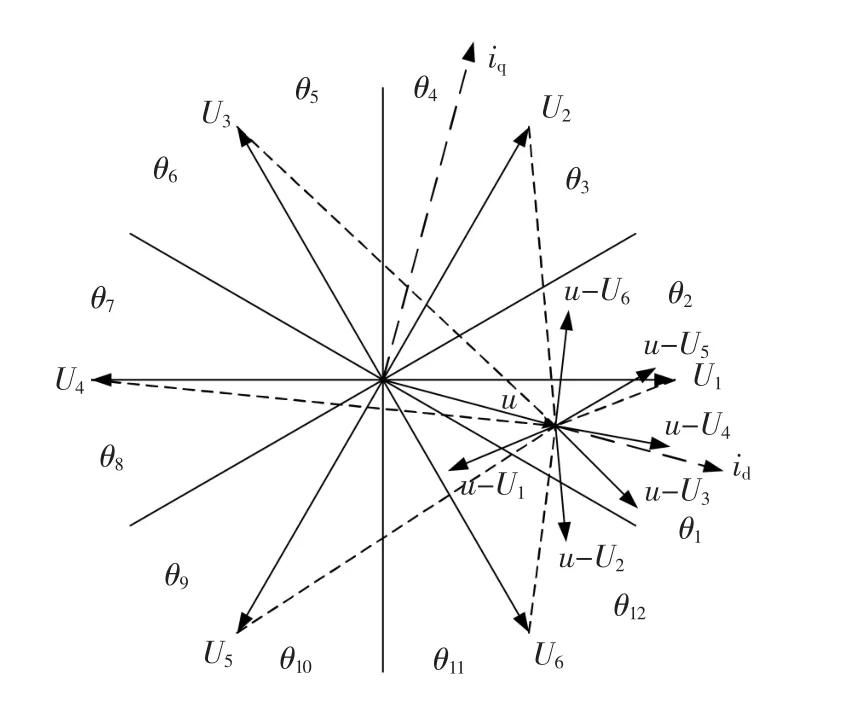
图3 开关矢量对有功(无功)功率作用Fig.3 Effect of active(inactive)power by switch vectors
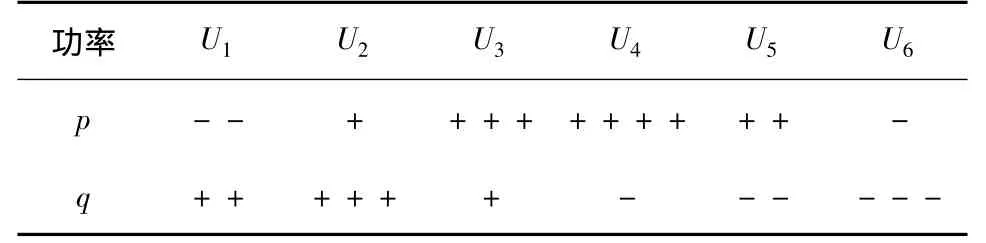
表2 第一扇区开关矢量对功率的控制幅度Table 2 Controlled magnitude of the power by switch vectors in the first sector
表中“+”代表增加的幅度,“+”越多增加幅度越大;“-”代表减小幅度,“-”越多减的幅度越大。同理可以得出其余扇区中各个开关矢量对于有功功率与无功功率的控制幅度。以表2为例,使有功功率减小的只有两种开关矢量,且这两种开关矢量一个是让无功功率增加,一个是让无功功率减少。所以在Δp小于0的时候有功功率减小的幅度控制无法实现,只能在增加有功功率的时候选择不同的开关矢量进行幅度控制。
由此设计快速开关表与慢速开关表。快速开关表就是在有功功率滞环比较器输出0或1时,都选择在各个扇区内让有功功率变化快的开关矢量,例如:在第一扇区,若无功功率需要增加就选择U3矢量;无功功率需要减小则选择U4矢量。慢速开关表就是选择各个扇区内让功率缓慢增加的开关矢量。例如:在第一扇区,若无功功率需要增加就选择U2矢量;无功功率需要减小则选择U5矢量。快慢开关表如表3、表4所示。
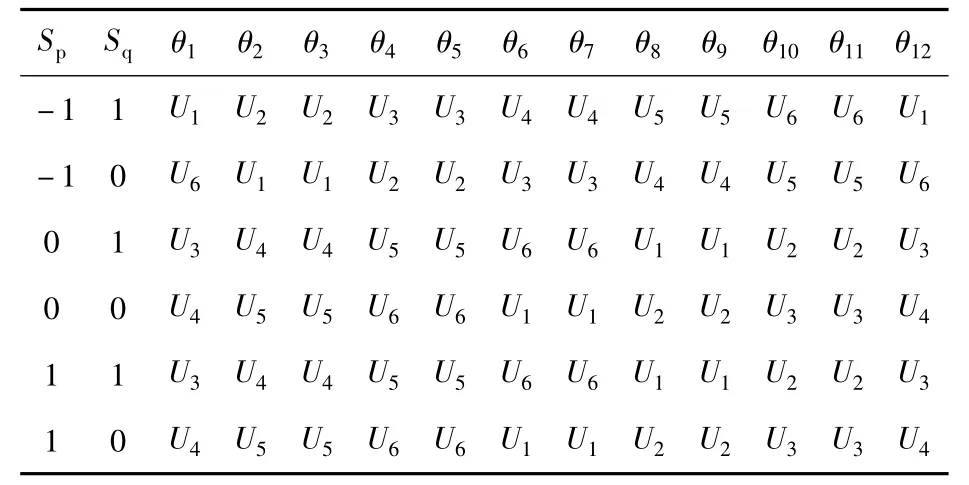
表3 快速开关表Table 3 Fast speed switch tables
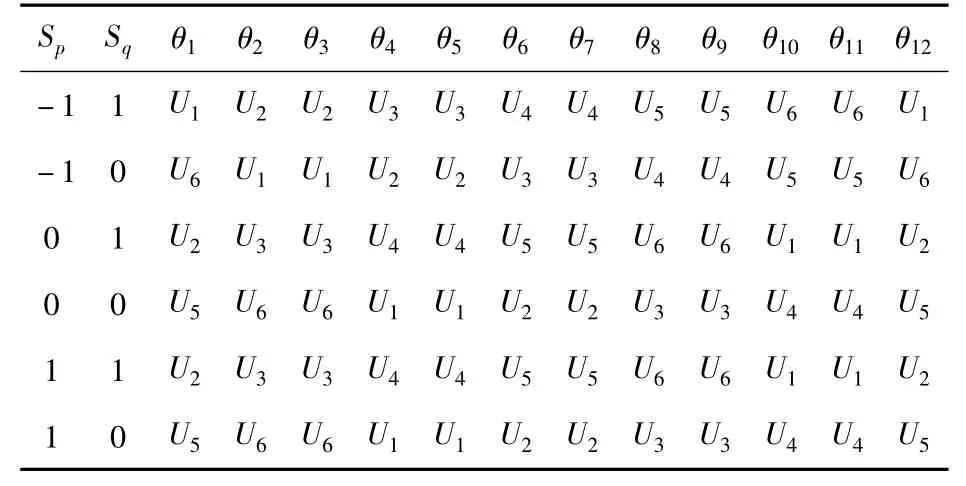
表4 慢速开关表Table 4 Slow speed switch tables
2.3 开关表的切换
根据式(8)中不同幅度控制的区间,设Cp是幅度控制的函数,得到如下关系:
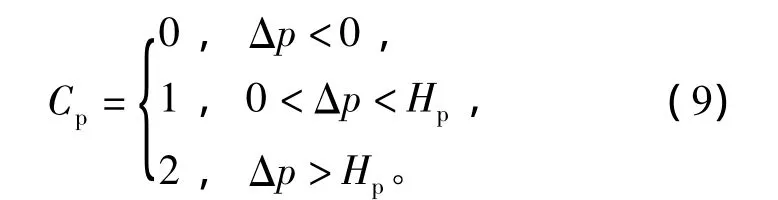
结合式(8),当Sp=0且Cp=1的时候,有功功率正在减小,为了使Δp保持在0~Hp之间,选择慢表;当Sp=1且Cp=2的时候,有功功率已经超过了阈值Hp,所以选择快表让功率快速接近给定功率;当Sp=1且Cp=1的时候,有功功率正在增加,为了使Δp持在0~HP之间,选择慢表;Cp=0且Sp=-1时,从表3、表4可以看出,快慢开关表选择的开关矢量都是一样的,所以选择快速或慢速开关表皆可。因此,开关表选择关系如表5所示。
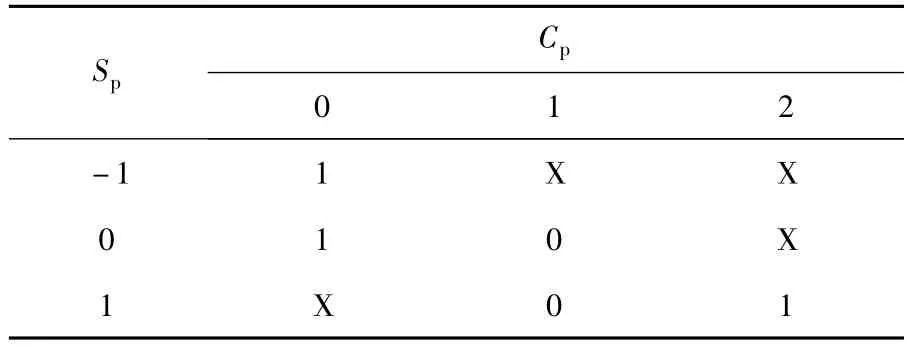
表5 快慢开关表选择Table 5 Switch tables selection between fast and slow
表中,“1”代表快表,“0”代表慢表,“X”代表此状态不存在。
3 仿真与实验结果
3.1 仿真结果
在Matlab/SIMULINK下搭建三相电压型PWM整流器直接功率控制模型,对本文所提方法进行仿真验证。其参数如下:交流侧相电压幅值 Um=频率f=50 Hz,交流侧电路等效电阻 R=0.3 Ω,电感 L=3 mH。直流侧电容 C=1 000 μF,直流侧负载电阻RL=90 Ω,给定电压Udcr=300 V。电压环的PI参数为:比例系数 Kp=0.3,积分系数Ki=20。仿真模型如图4所示,仿真结果如图5~9。

图4 改进DPC系统仿真模型Fig.4 Simulationmodel of improved DPC system structure

图5 新型控制方法的交流侧电压电流波形Fig.5 Simulationcurves ofAC side’s voltage and current by new control method

图6 传统控制方法的有功功率与无功功率波形Fig.6 Simulationcurves ofactive and reactive power by traditional control method
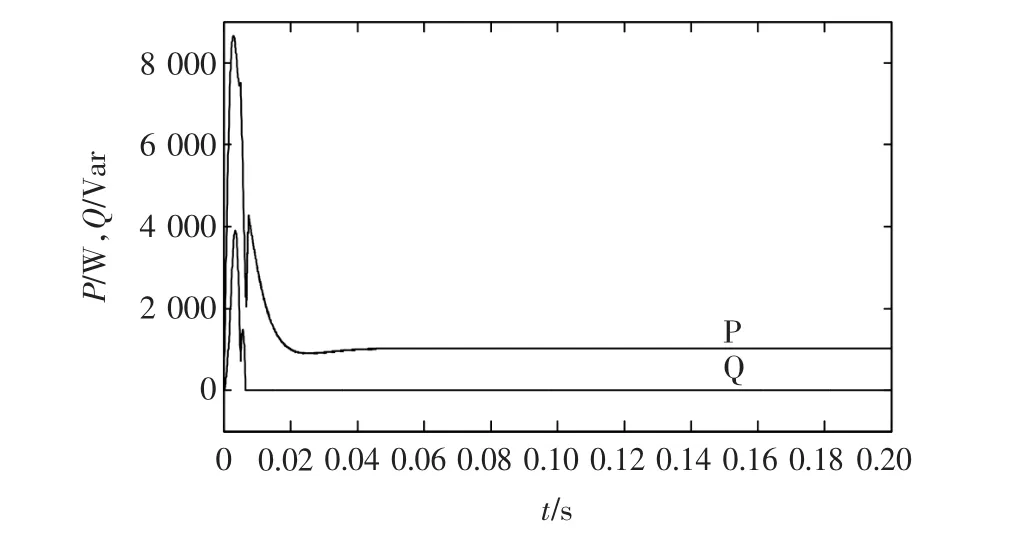
图7 新型控制方法的有功功率与无功功率波形Fig.7 Simulationcurves ofactive and reactive power by new control method
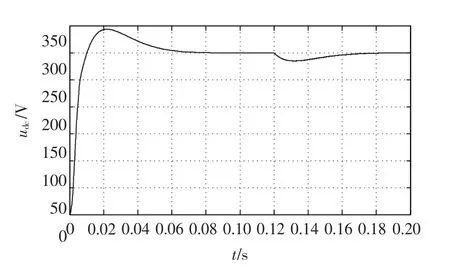
图8 传统控制方法的直流电压输出波形Fig.8 Simulationcurves ofDC voltage by traditional control method
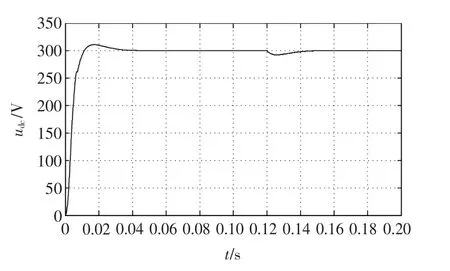
图9 新型控制方法的直流电压输出波形Fig.9 Simulation curves ofDC voltage by new control method
由图5可以看出,改进的直接功率控制系统交流侧的电流和电压是同相位的,且没有电流波形畸变,因此验证了该系统是在单位功率因数下运行。由图6和图7可知,改进的直接功率控制策略消除了无功功率的失控区,由此也改善了有功功率的波形。对比图8和图9的直流电压输出波形可以看出,改进的直接功率控制:上升时间0.011 s、稳定时间0.04 s、电压超调2.26%;而传统的直接功率控制:上升时间 0.013 s、稳定时间 0.098 s、超调9.18%。改进的直接功率控制方案使得上升速度稍快、超调降低了6.92%、稳定时间变为传统直接功率控制的40.8%。
3.2 实验结果
本文搭建了PWM整流器试验样机对仿真结果进行验证,样机如图10所示。采用ST公司的32位ARM芯片STM32F103ZET6为控制器,利用控制器的2路DA通道实现观测内部变量P、Q。
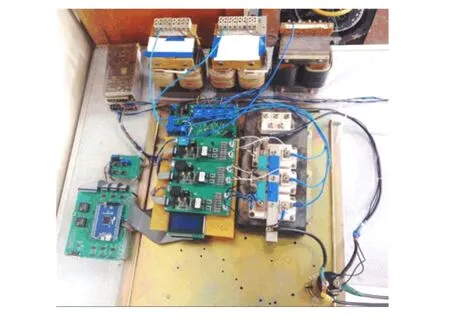
图10 实验样机Fig.10 Experimental prototype
对比图11和图12可知,改进的直接功率控制系统交流侧的电流谐波含量明显降低,图12的电流波形表明系统已接近单位功率因数运行。从图14可以看出,无功功率的波动很小,不会对有功功率产生影响,因此有功功率波形非常平稳,无功失控区已被消除。对比图15和图16实验波形可知,新型控制方法的直流电压的超调量比传统控制方法小、稳定时间比传统控制方法快。可见,本文所采用的双开关表直接功率控制策略能消除无功失控区,且有效改善了系统的动态性能。
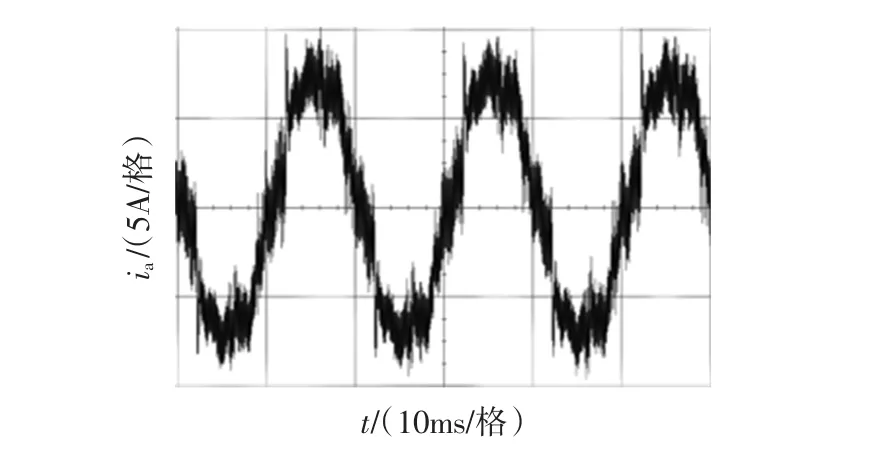
图11 传统控制方法电流实验波形Fig.11 Experimental curves of AC side’s current by traditional control method

图12 改进控制方法的电流实验波形Fig.12 Experimental curves of AC side’s current by new control method

图13 传统控制方法的有功功率与无功功率实验波形Fig.13 Experimental curves of active and reactive power by traditional control method

图14 新型控制方法的有功功率与无功功率实验波形Fig.14 Experimental curves of active and reactive power by new control method
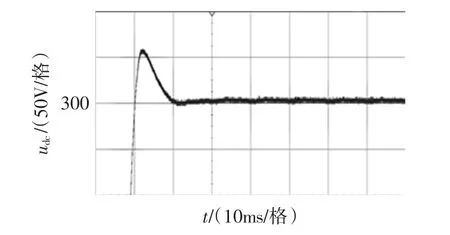
图15 传统控制方法的直流电压实验波形Fig.15 Experimental curves of DC voltage by traditional control method
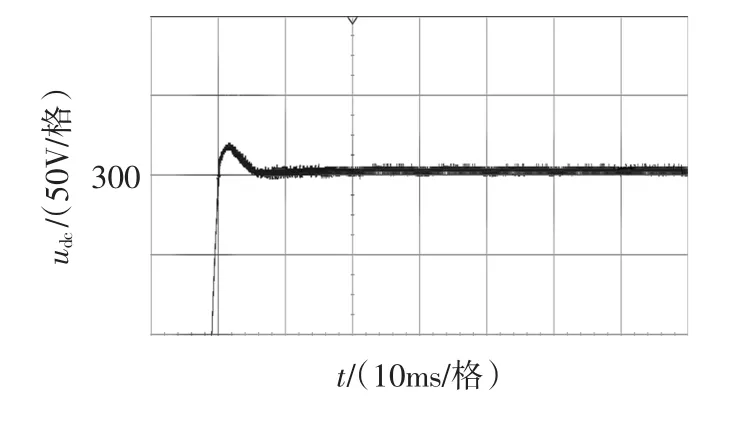
图16 新型控制方法的直流电压实验波形Fig.16 Experimental curves of DC voltage by new control method
4 结论
传统的电压型PWM整流器直接功率控制策略存在无功功率失控区,引起交流侧电流波形畸变,其原因是为了减少开关频率而使用了零矢量,零矢量只能增加有功功率,不能调节无功功率。本文提出了一种新的直接功率控制方案,采用三电平滞环比较器,根据开关矢量对于有功功率和无功功率的控制幅度,设计了快速、慢速开关表。由仿真和实验结果可知,此方案消除了无功功率失控区,同时改善了系统的动态性能,验证了此方案的正确性和有效性。
[1]张崇巍,张兴.PWM整流器及其控制[M].北京:机械工业出版社,2003,12 -14.
[2]王久和.电压型PWM整流器的非线性控制[M].北京:机械工业出版社,2008,6 -9.
[3]卢健康.PWM整流器直接功率控制策略仿真研究[J].计算机仿真.2012,29(8):291 -295.LU Jiankang.Improved direct power control strategy for three-phase pwmrectifier[J].Computer Simulation,2012,29(8):291 -295.
[4]方宇,裘迅,邢岩,等.三相高功率因数电压型PWM整流器建模和仿真[J].电工技术学报,2006,21(10):44 -49.FANG Yu,QIUXun,XING Yan,et al.Modeling andsimulation of three phase high power factor PWMrectifier[J].Transactions of China Electrontechnical Society,2006,21(10):44 -49.
[5]陈伟.三相电压型PWM整流器的直接功率控制技术研究与实现[D].武汉:华中科技大学,2009,28 -49.
[6]赵甜甜.三相电压型PWM整流器的直接功率控制策略研究[D].威海:山东大学威海分校,2012,14-22.
[7]王久和,李华德.一种新的电压型PWM整流器直接功率控制策略[J].中国电机工程学报,2005,25(16):47 -52.WANG Jiuhe,LIHuade.A new direct power control strategy of three phase boost type pwm rectifier[J].Proceedings of the CSEE,2005,25(16):47 -52.
[8]殷振环.PWM整流器直接功率控制研究[D],北京:北京交通大学,2009,16 -27.
[9]韩愚拙,林明耀,郝立,等.电压型PWM整流器三状态直接功率控制策略[J].电工技术学报,2013,28(5):208-212.HANYuzhuo,LINMingyao,HAO Li,et al.Triple-state direct power control sratagy ofthree phase boost type pwmrectifiers[J].Transactions of China Electrotechnical Society,2013,28(5):208-212.
[10]张颖超,赵争鸣,袁立强,等.三电平PWM整流器直接功率控制[J].电工技术学报,2008,23(5):62-68.ZHANG Yingchao,ZHAO Zhengming,YUAN Liqiang,et al.Direct power control for three-level pwm rectifier[J].Transactions of China Electrotechnical Society,2008,23(5):62-68.
[11]黄晶晶,张爱民,陈晓菊,等.三相电压型PWM整流器双开关表直接功率控制策略[J].电力系统自动化,2012,36(18):128-132.HUANG Jingjing,ZHANG Aimin,CHEN Xiaoju,et al.A study on double switching vector table direct power control of threephase pwm Rectifier[J].Automation of Electric Power Systems,2012,36(18):128 -132.
[12]BAKTASH,AMIR V,ABOLFAZLMASOUM M A S.Improved switching table for direct power control of three-phase pwm rectifier[J].Engineering Village,2007,12(3):38 -43.
[13]刘秀种,张化光,褚恩辉,等.三相电压型PWM整流器功率控制方法[J].电机与控制学报,2009,13(1):47-51.LIU Xiuchong,ZHANG Huaguang,CHU Enhui et al.Power control schane for three-phase voltage-type rectifiers[J].Electric Machines and Control,2009,13(1):47 -51.
