螺杆泵直驱单元组合超细长永磁电机振动研究
2015-01-25张炳义刘忠奇丁宏龙刘凯冯桂宏
张炳义, 刘忠奇, 丁宏龙, 刘凯, 冯桂宏
(沈阳工业大学电气工程学院,辽宁沈阳110870)
0 引言
潜油螺杆泵作为一种无杆采油的机械装备,可以解决传统采油设备抽油杆和油管的磨损问题,广泛用于水平井、高含沙井等复杂井况采油。其驱动电机工作在地下数千米的油层套管中,通常是立式悬吊在高温高压的原油中[1-2]。潜油电机振动导致系统零部件磨损是电泵机组主要故障点之一。潜油永磁电机取代了两极三相鼠笼式异步机加减速器的传统结构,实现螺杆泵低速大转矩直驱,成功避免了异步机加齿轮减速系统效率低、功率因数低的缺陷[3]。然而,油井套管有限的径向尺寸严格限制了潜油电机的定子外径,为简化电机细长定子下线工艺,采用近极槽比集中绕组电磁方案,仍然存在转矩脉动问题,再加上细长永磁转子加工工艺复杂产生转子偏心加剧电磁振动[4-5]。因此,有必要对近极槽比超细长永磁电机转子偏心引起的振动情况进行分析,为单元组合式潜油永磁电机的可行性提供理论依据。
关于潜油电泵机组振动问题,许多学者进行了较深入的研究,文献[6]通过建立潜油电动机启动过程中电潜泵和油管柱组合振动模型,得出不同工况下举升油管的运动规律。文献[7]对多极少槽盘式永磁同步电动机电磁噪声进行了计算,对比分析了不同定转子结构的气隙磁密谐波以及电磁力波分布。文献[8]详细分析了几种不同槽配合的分数槽电机径向力的振动模数,在同样极数下,分数槽绕组会产生模数更低的电磁力,从而更容易引起电机的振动和噪声。文献[9]建立了转子偏心下的表贴式永磁电机空载气隙磁场解析模型。
本文采用一种单元组合式潜油永磁电机,将超细长比的潜油电机分成若干单元电机并联运行,各电机像电池一样头尾连接,功效上等同于一台超细长永磁电机,对其电磁振动问题进行研究。基于永磁电机径向电磁力波产生原理,对10极12槽潜油永磁电机径向气隙磁密和径向电磁力波的频谱特性进行分析。对潜油电机细长永磁转子偏心挠度进行计算,利用有限元仿真细长永磁转子偏心对近极槽比配合电机电磁力波频谱特性的影响。并利用样机试验进行试验数据和理论计算值的对比分析。
1 单元组合超细长潜油永磁电机结构
传统潜油螺杆泵系统框图如图1所示,位于井底的潜油异步电机通过减速器驱动螺杆泵将原油抽到地面。其中潜油异步电机和减速器均是影响系统可靠性的主要因素。而单元组合潜油永磁电机,可以取消减速器,实现低速直驱螺杆泵。将超细长比结构的潜油电机分成若干个单元永磁同步电动机(简称单元电机)组合运行,实现各单元电机间机械串联、电气并联,具体的电机结构如图2所示[10]。系统可以根据需要的转矩选择单元电机台数,总输出转矩为各单元电机输出转矩之和。装配时,各单元电机依次压装到细长套管中。

图1 传统潜油螺杆泵系统框图Fig.1 System diagram of traditional submersible screw pump
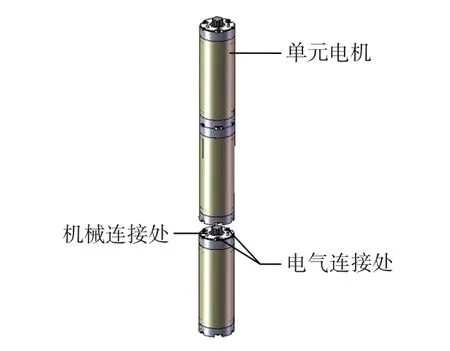
图2 单元组合潜油永磁电机示意Fig.2 Structure diagram of unit combination submersible permanent magnet motor
新型的单元组合式潜油永磁电机与传统的鼠笼式异步电机相比有以下优点:①各级转子功率分配均匀,不存在转差率差异,能够同步旋转。②采用永磁电机低速大转矩直驱,系统效率高,功率因数高,能大大降低能耗。③每台电机都有扶正轴承和推力轴承保证气隙均匀,提高可靠性。④简化了潜油电机定子绕组下线工艺,降低制造成本。
2 潜油永磁电机振动分析
2.1 近极槽比永磁电机径向力波频谱计算
永磁电机电磁振动是由电机气隙磁场作用于电机铁心产生径向电磁力波所激发[11]。根据Maxwell应力张量理论,定转子气隙圆周上径向电磁力Fγ的表达式可表示为

式中:γ为径向电磁力波次数;μ0为空气磁导率;br、bta分别为气隙磁密的径向、切向分量,计算电磁振动时通常忽略气隙磁密的切向分量[12]。

式中:u为定子绕组产生的磁密谐波次数;v为转子永磁体产生的磁密谐波次数;bu(θ,t)、bv(θ,t)分别为定子绕组及转子永磁体产生的磁通密度沿位置角θ随时间t变化的瞬时值。

式中:p为电机极对数;ω1为定子绕组角频率;ωv为v次谐波角频率;φv为定、转子相同次谐波向量之间的夹角;Bu、Bv分别为定、转子磁密各次谐波幅值。
采用近极槽比电磁方案会产生大量的低数次、分数次及整数次谐波磁密,进而导致径向电磁振动加剧。Fγ的具体表达式参见文献[13]、[14],其产生的径向电磁力波次数γ及对应频率fγ可表示为

式中:f为基频;fv为转子谐波频率。
样机的主要参数如表1所示,适用于国标114/116 mm系列潜油电机。建立样机的整体有限元模型,定子绕组添加三相正弦电流源。电机整体磁密分布如图3所示,图中定子齿磁密出现不均匀分布,在x轴轴线上的两个定子齿均发生明显的齿顶漏磁,导致气隙磁密分布不均如图4所示,加剧径向力波谐波幅值。
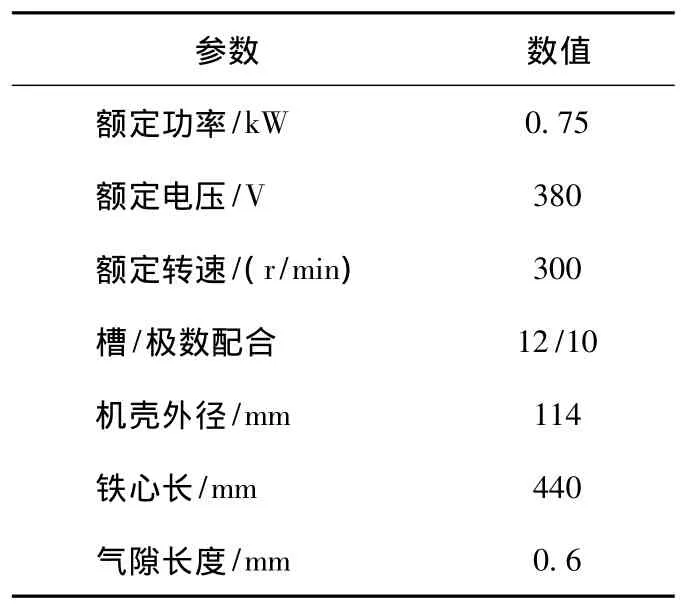
表1 样机主要参数尺寸Table 1 Main parameters of prototype
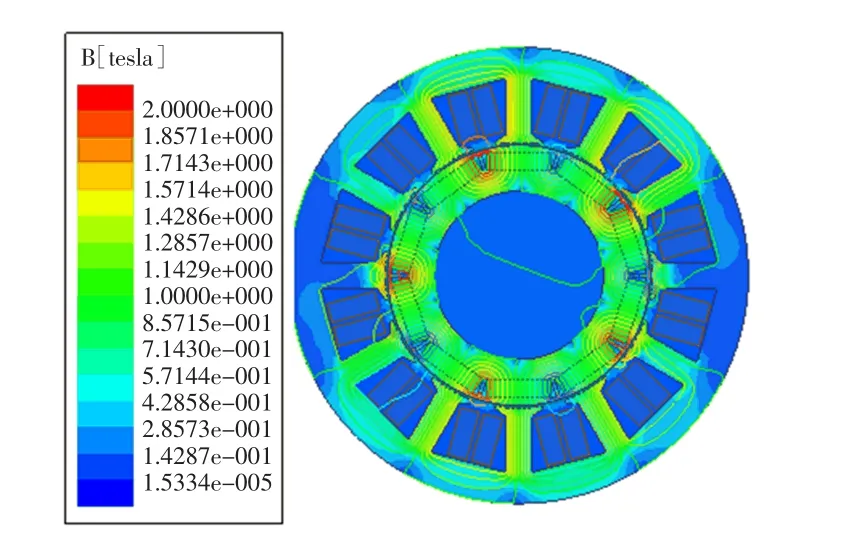
图3 磁密分布云图Fig.3 Distribution nephogram of magnet density

图4 径向磁密沿气隙圆周分布曲线Fig.4 Distribution curve of radial flux density
取整个电枢圆周周长作为基准波,其他谐波次数均相应增加p倍。对径向磁密进行傅立叶分解,得到其频谱如图5所示,主要含有5次、7次、15次、19次、25次、29次和31次谐波。其中5、15和25对应整数次谐波,由转子磁动势产生;7、19、29和31对应分数次谐波,由定子磁动势产生。根据式(4)得到,定、转子谐波相互作用产生的力波次数主要有2次和4次。

图5 径向磁密频谱Fig.5 Frequency spectrum of radial magnet density
取定子齿表面上点P1(0,30)为研究对象,如图8所示,分析该点处的磁密变化,计算出其所受径向电磁力随时间变化情况如图6所示,40 ms对应一个单元电机,并得到力波频谱如图7所示,其中最大的分量为基波分量,其在定子圆周上均匀分布,不产生电磁振动。其次较大的电磁力频率发生在50 Hz、100 Hz、75 Hz,对应的力波次数分别为 2、4、3,在定子圆周上非均匀分布,是产生永磁电机电磁振动的主要部分。
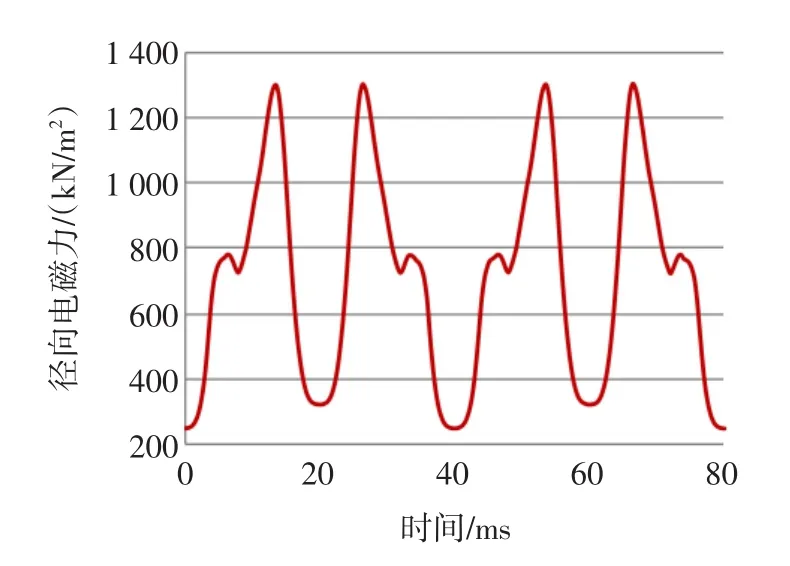
图6 点(0,30)径向电磁力Fig.6 Radial electromagnetic force at point(0,30)

图7 点(0,30)径向电磁力频谱Fig.7 Radial electromagnetic force spectrum at point(0,30)
2.2 细长永磁转子偏心对力波频谱特性的影响
潜油电机结构细长,其长径比高达100:1,甚至更高。在系统运行时常出现转子偏心振动扶正轴承磨损,尤其在启动过程中振动现象更加明显。图8为转子偏心物理模型,令转子沿y轴正方向发生偏心量e,产生单边磁拉力,导致定子内表面的径向磁拉力沿对角线方向代数和不再平衡,Y轴正半平面磁拉力增大,对应图8中Fi1力组;Y轴负半平面磁拉力减小,对应图中Fi2力组。(Fi1-Fi2)即为新增的径向力波分量,加剧电机振动。转子偏心导致的单边磁拉力[15]可表示为

式中:β为经验系数;D2为气隙直径;Lef为铁心长度;b为气隙磁密;e0为气隙偏心长度;δ为气隙长度。
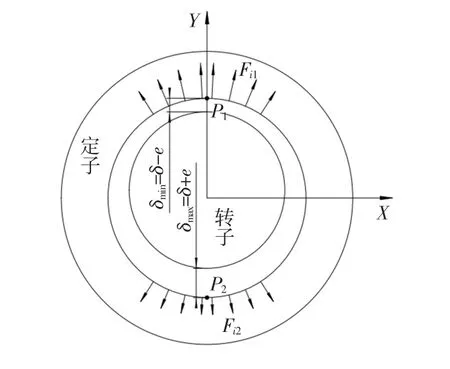
图8 转子偏心模型Fig.8 Eccentric rotor model
采用单元电机串接方案,为了提高组合后的有效铁心长度,需加大单台单元电机铁心长度,设计样机长径比为7.5:1,转子两侧轴承间距574 mm,进一步加剧了工艺制作难度。故对转子不同偏心度所引起的径向电磁振动变化进行分析,为单元电机新型结构可行性提供理论依据。
潜油永磁电机属特种电机,制造工艺复杂,在样机试制时,气隙装配误差(定义为静偏心量)最大值emax1=0.2 mm,导致气隙偏心产生单边磁拉力,增加转子挠度(定义为动偏心量),加剧电机振动幅度。根据公式(5),取e0=emax1,对转子动偏心量进行有限元计算,得到转子挠度分布如图9所示。从图中可以看出,挠度最大值emax2=0.0421 9 mm发生在转子中间位置,并沿轴向分别向两侧递减。转子累计偏心最大值emax=emax1+emax2=0.24219 mm。
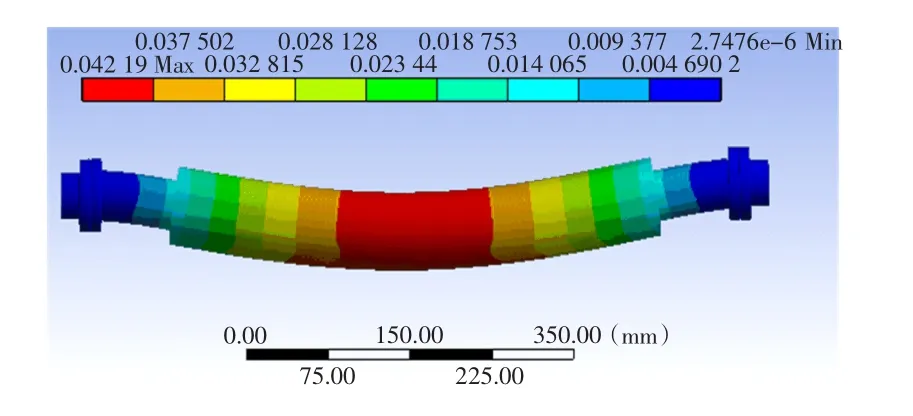
图9 转子动偏心量挠度云图Fig.9 Rotor dynamic eccentricity deflection nephogram
在0~0.25 mm范围内,参数化转子偏心量e,计算不同偏心量所引起的气隙磁密变化以及径向电磁力幅值变化情况[16-17]。图10对比了转子未发生偏心和偏心量为emax时的气隙磁密曲线,较“偏心0 mm”曲线,“偏心0.25 mm”曲线波形发生了进一步的突变,波峰出现明显的锯齿波,空间位置相差机械角度180°的2点磁密幅值呈相悖变化趋势。
点P1、P2为相对变化最大的一组点,具体的变化趋势如图11所示,图中基准线为偏心0 mm时点P1、P2处的电磁力 F1、F2幅值随时间变化曲线,F1、F2大小相等、方向相反,合力为零,即单边磁拉力为零。当偏心0.25 mm时,点P1、P2处的径向磁拉力呈磁密的平方倍数变化,F1增大,F2减小,(F1-F2)即为新增的径向力波分量。
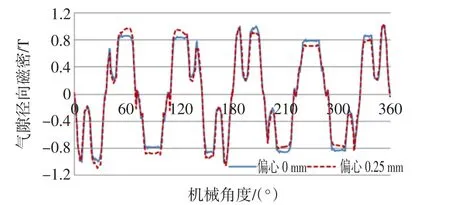
图10 转子偏心量对气隙磁密的影响Fig.10 Influence on air gap flux density with rotor eccentricity
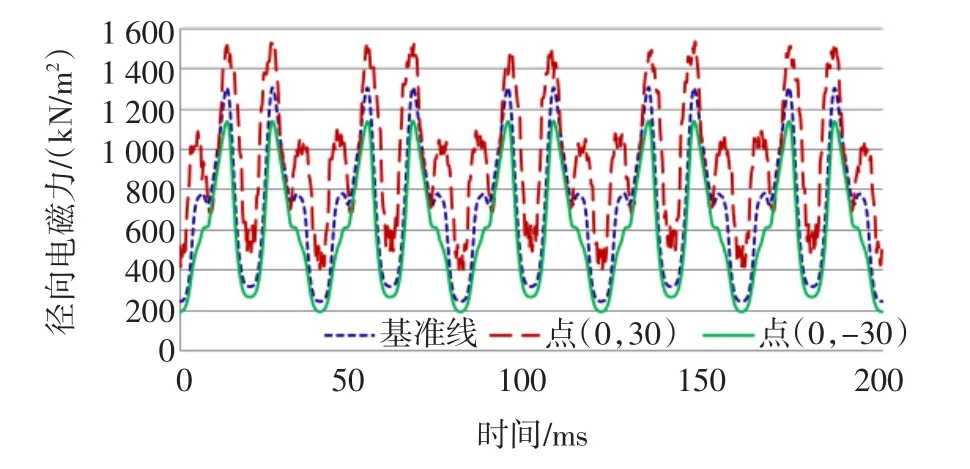
图11 偏心0.25mm电磁力变化曲线Fig.11 Electromagnetic force curve with eccentricity of 0.25 mm
取0.05 mm为步长,对不同偏心量e所对应的电磁力波频谱进行计算,分别得到点P1、P2电磁力波频谱随偏心量e的变化情况如图12、图13所示。
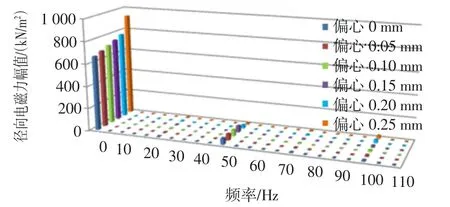
图12 点(0,30)力波频谱柱状图Fig.12 Force wave spectrum histogram at point(0,30)
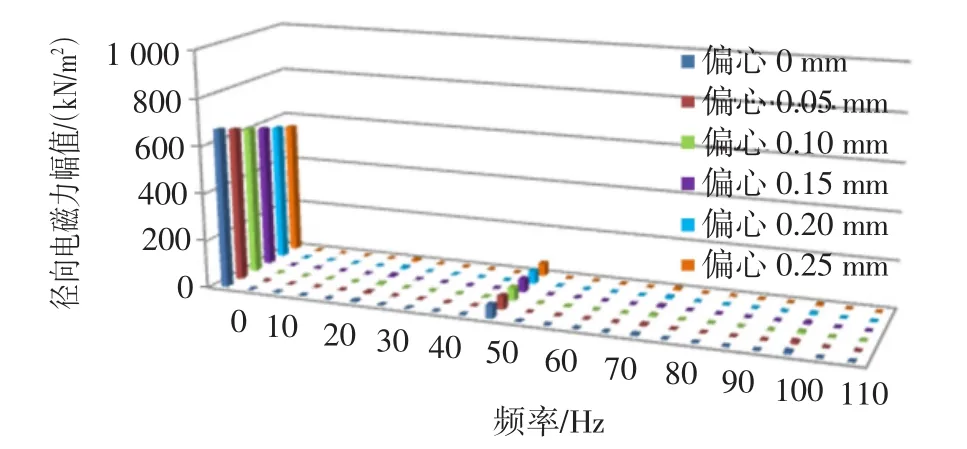
图13 点(0,-30)力波频谱柱状图Fig.13 Force wave spectrum histogram at point(0,-30)
在图12中,点P1处的径向电磁力基波幅值随偏心量的增加而增大,当偏心量 e≥0.2 mm时,50 Hz力波幅值开始明显下降,而100 Hz力波幅值开始迅速上升。在图13中,点P2处的径向电磁力基波幅值和100 Hz力波幅值随偏心量的增加而减小,50 Hz力波幅值基本持平。对偏心后的力波幅值进行对比计算,得到Y轴轴线上的力波增幅如图14所示,其力波幅值基波沿定子圆周不再均匀分布,基波、2次以及4次力波幅值随偏心量的增加均有明显加大,当偏心量e≥0.2 mm时,2次力波开始出现反向增长。
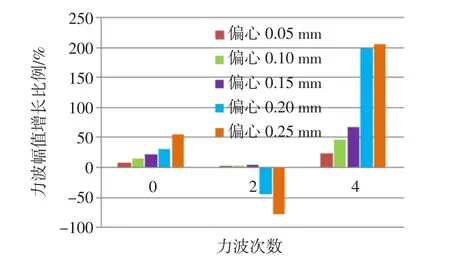
图14 Y轴轴线上力波增幅条形图Fig.14 Force wave amplification bar chart on Y axis
3 样机试验研究
电磁力波的直接测量十分困难,采用声压法通过测试电磁噪音频谱来间接验证电磁力波频谱计算的有效性。图15为样机试验平台,样机主要性能参数见表1,采用压频比变频控制策略,样机通过联轴器与发电机相连,发电机将电能输送给负载电阻消耗。保持样机在额定转速300 r/min下运行,有明显的低频噪音输出,利用INV3020数据采集系统对样机振动噪音信号进行测量。实测的噪音频谱如图16“e>0.2 mm”曲线所示,其中第一大噪声源来自50 Hz,噪声级达到73.6 dB;其他主要噪音源依次有100 Hz 65.9 dB、75 Hz 64.8 dB、125 Hz 60.2 dB。
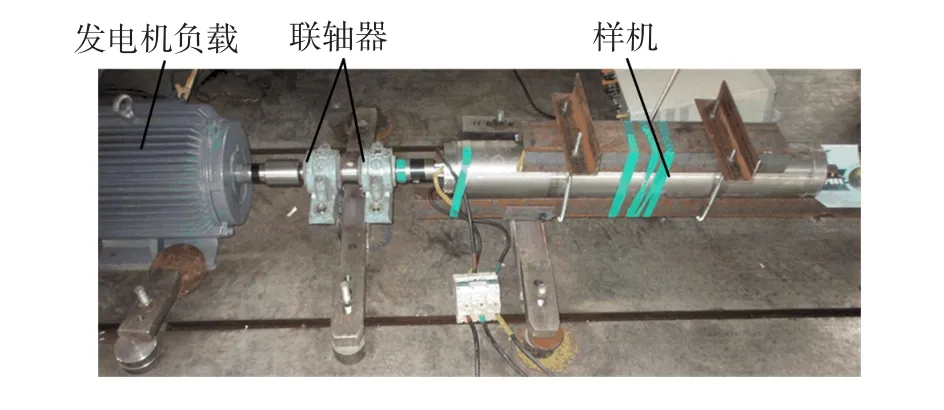
图15 噪音测试试验台Fig.15 Noise test platform
拆卸样机,用百分表测量转子尺寸,转子实物如图17所示,转子外圆公差+0.08 mm,加上装配误差,实际转子偏心量在0.2 mm以上。重新加工转子校正0.1 mm后组装测试,噪音频谱如图16“e<0.1 mm”曲线所示,低频振动噪音明显下降,表明转子装配公差是2次、4次径向力波的主要来源。
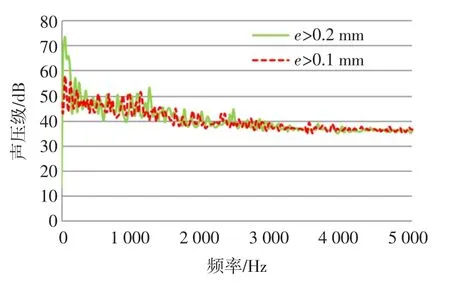
图16 额定负载噪音频谱Fig.16 Noise spectrum with rated load

图17 样机转子Fig.17 Prototype rotor
进行潜油永磁电机组合试验,具体试验台如图18所示。样机1与样机2转轴通过花键套连接,在空间上保证两台样机的定子轴线和转子轴线位置分别一致,采用一台变频器同时并联供电两台单元电机控制策略,样机从零到额定转速300r/min均能平稳启动,并且在恒速运行时,电机振动较单台样机独立运行有下降趋势,表明单元电机组合后降低了转子挠度。
4 结论
基于径向电磁力波有限元仿真,对近极槽比潜油永磁电机电磁振动进行了计算,分析了细长永磁转子不同偏心量对振动力波幅值的影响,并进行了单元电机振动噪声测试试验和组合运行试验,得到如下结论:
1)对近极槽比永磁电机电磁振动影响较大的力波阶数为γ≤4的电磁力波,其中2次力波起主要作用。
2)潜油电机细长永磁转子偏心对电机电磁振动有明显增强作用。保证其定转子气隙偏心量在16.67%以下,才能有效降低电磁振动幅值。较传统异步电机转子,细长永磁转子动态挠度引起的偏心振动不能忽略。
3)电磁振动径向力波随偏心量的加大而增长。当偏心量大于30%时,电磁振动2次力波幅值反向急剧增加44.3%,4次力波幅值急剧增加198.7%。
4)通过理论和样机试验对比,实测噪音频谱与理论计算径向力波次数频率一一对应,验证了本文计算电磁振动的准确性。对于单元组合潜油永磁电机的细长结构,转子偏心是电磁振动的主要来源。各单元电机转轴花键套组合结构有利于降低转子动态挠度,提高系统运行可靠性。对于114 mm系列潜油电机推荐取气隙长度大于0.8 mm。
[1]王世杰,李勤.潜油螺杆泵采油技术及系统设计[M].北京:冶金工业出版社,2006:2-9.
[2]THORSEN O,DALVA M.Combined electrical and mechanical model of electric submersible pumps[J].IEEE Transactions on Industry Application,2001,37(2):541 -547.
[3]郝明晖,张健,郝双晖,等.井下直驱螺杆泵潜油伺服系统的设计[J].机械设计与制造,2011(7):221-223.HAO Minghui,ZHANG Jian,HAO Shuanghui,et al.Design of servo system for direct-driven submersible progressing cavity pump[J].Machinery Design & Manufacture,2011,(7):221-223.
[4]杨浩东,陈阳生.分数槽永磁同步电机电磁振动的分析与抑制[J].中国电机工程学报,2011,31(24):83-89.YANG Haodong,CHEN Yangsheng.Electromagnetic vibration analysis and suppression of permanent magnet synchronous motor with fractional slot combination[J].Proceedings of the CSEE,2011,31(24):83-89.
[5]罗宏浩,廖自力.永磁电机齿槽转矩的谐波分析与最小化设计[J].电机与控制学报,2010,14(4):36-40.LUO Honghao,LIAO Zili.Harmonic analysis and minimization of cogging torque in permanent magnet motors[J].Electric Machines and Control,2010,14(4):36 -40.
[6]孔祥龙.潜油螺杆泵驱动电机设计与热分析[D].哈尔滨:哈尔滨工业大学,2011.
[7]王巍.多极少槽盘式永磁同步电动机电磁噪声的计算与抑制[D].沈阳:沈阳工业大学,2010.
[8]ZHU Z Q,XIA Z P,WU L J,et al.Influence of slot and pole number combination on radial force and vibration modes in fractional slot PM brushless machines having single-and double-layer windings[C]//Energy Conversion Congress and Exposition,2009.ECCE 2009.IEEE.IEEE,2009:3443-3450.
[9]仇志坚,李琛,周晓燕,等.表贴式永磁电机转子偏心空载气隙磁场解析[J].电工技术学报,2013,28(3):114-121.QIU Zhijian LI Chen ZHOU Xiaoyan,et al.Analytical calculation of no-load air-gap magnetic field in surface-mounted permanentmagnet motors with rotor eccentricity[J].Transactions of China Electrotechnical Society,2013,28(3):114 -121.
[10]冯桂宏,张炳义,刘忠奇,等.一种单元组合式永磁同步电动机组成的超细长结构电机[P].中国:ZL201110174207.7,2013-01-02.
[11]张磊,温旭辉.车用永磁同步电机径向电磁振动特性[J].电机与控制学报,2012,16(5):33-39.ZHANG Lei,WEN Xuhui.Radial electromagnetic vibration model characteristics of PMSMs for electric vehicles[J].Electric Machines and Control,2012,16(5):33 -39.
[12]张冉,王秀和,乔东伟.极弧系数选择对永磁无刷直流电机激振力波的影响[J].中国电机工程学报,2010,30(21):79-85.ZHANG Ran,WANG Xiuhe,QIAO Dongwei.Influence of polearc coefficient on exciting force waves of permanent magnet brushless DC motors[J].Proceedings of the CSEE,2010,30(21):79-85.
[13]王荀,邱阿瑞.笼型异步电动机径向电磁力波的有限元计算[J].电工技术学报,2012,27(7):109 -107.WANG Xun,QIU Arui.Finite element calculation of radial electromagnetic force wave in squirrel-cage asynchronous motors[J].Transactions of China Electrotechnical Society,2012,27(7):109-107.
[14]李俊武.小功率永磁同步电动机电磁振动与噪声研究[D].哈尔滨:哈尔滨工业大学,2009.
[15]单丽,盛海军,鲍晓华.单边磁拉力对湿式潜水电机转子振动的影响[J].电机技术,2013(4):25-28.SHAN Li,SHENG Haijun,BAO Xiaohua.Influence on the rotor vibration by the unbalanced magnetic pull in the wet submersible motor[J].Electrical Machinery Technology,2013(4):25 -28.
[16]张冉,王秀和,杨玉波,等.基于等效剩磁法的永磁电动机转子偏心磁场解析计算[J].电工技术学报,2009,24(5):7-12.ZHANG Ran,WANG Xiuhe,YANG Yubo,et al.Analytical prediction of magnetic field in permanent magnet motors with rotor eccentricity based on the method of equivalent remanence[J].Transactions of China Electrotechnical Society,2009,24(5):7 -12.
[17]周晓燕,李琛,仇志坚,等.插入式永磁电机空载磁场摄动解析模型[J].电机与控制学报,2013,17(9):63 -72.ZHOU Xiaoyan,LI Chen,QIU Zhijian,et al.Open-circuit magnetic field study for insert permanent magnet motor with rotor eccentricity based on perturbation analytical method[J].Electric Machines and Control,2013,17(9):63 -72.