开关磁阻电机起动/发电状态切换控制策略研究
2015-01-25刘勇智周政盛增津范冰洁宋金龙
刘勇智, 周政, 盛增津, 范冰洁, 宋金龙
(空军工程大学航空航天工程学院,陕西西安710038)
0 引言
开关磁阻起动/发电系统由于在高温、高速、高空条件下具有高控制精度、高功率密度、高容错能力的特点,成为了未来多/全电飞机电源系统的重要发展方向[1]。开关磁阻电机根据转子位置角度来控制功率电路中功率管的实时通断,以改变相电流的生成位置和幅值大小,从而产生不同大小和方向的励磁效果,很便捷地实现电能的双向流动以及起动运行与发电运行的双功能切换。切换过程无需附带任何发动机附件,很好地契合了飞机应用要求和约束条件,成为第四代以后战机起动/发电系统的主要考虑对象之一[2]。
开关磁阻起动/发电机的切换过程根据工作顺序的先后可分为电动状态的退出阶段、发电状态的空载建压阶段以及额定负载调压阶段[3]。如何快速、平稳地完成起动/发电状态切换,并提供满足国军标(GJB181A-2003)对飞机供电品质要求的高压直流电能,是开关磁阻起动/发电系统发展和应用过程中面临的关键难题,也是开关磁阻起动/发电切换控制器设计的基本控制要求。在切换过程中,原动机(飞机发动机)转速、电动状态机械负载、发电状态电气负载等都会发生剧烈的变化,这给整个控制过程造成了明显的干扰,增大了控制难度,也是目前亟需解决的关键技术问题[4]。
针对开关磁阻电机的控制问题,目前的研究大多集中于固定转速、额定负载条件下的原理分析与控制器设计与仿真。目前,对于开关磁阻发电机(switched reluctance generator,SRG)的稳压控制策略有两类[4]。一类是基于功率电路拓扑结构设计和参数优化的稳压策略,如文献[5]通过设计电容滤波器对输出电压品质进行优化;另一类则是基于反馈控制理论的PID控制器设计,如南京航空航天大学设计实现的6kW开关磁阻起动/发电系统,采用固定关断角、微调开通角的电流斩波控制,并且加入了以电流反馈为内环、电压反馈为外环的双闭环变参数PID 控制[6-8]。PID 控制器具有简单、快速的特点,并且其参数整定技术已非常成熟,可以达到较好的控制效果。但是由于该控制器只把控制目标(即输出电压和相电流)作为反馈量,而忽略了其他状态量对控制目标的影响,所以在一定程度上牺牲了开关磁阻发电机的动态性能[9]。
本文着重于航空背景条件下的开关磁阻起动/发电机切换过程的研究,讨论转速变化对空载建压过程的影响,研究负载突变对调压过程的影响规律。设计基于滑模变结构的控制器对切换过程进行仿真,并通过2 kW原理样机进行实验验证。
1 开关磁阻发电机切换过程
航空开关磁阻电机的切换过程如图1所示,当电机退出起动状态,开始切换到发电状态时,其输出电压并不能立刻满足GJB181A-2003对飞机供电品质的要求,而是需要经历一个复杂的过渡过程,这个过渡过程可以分为空载建压和额定负载调压两个阶段。
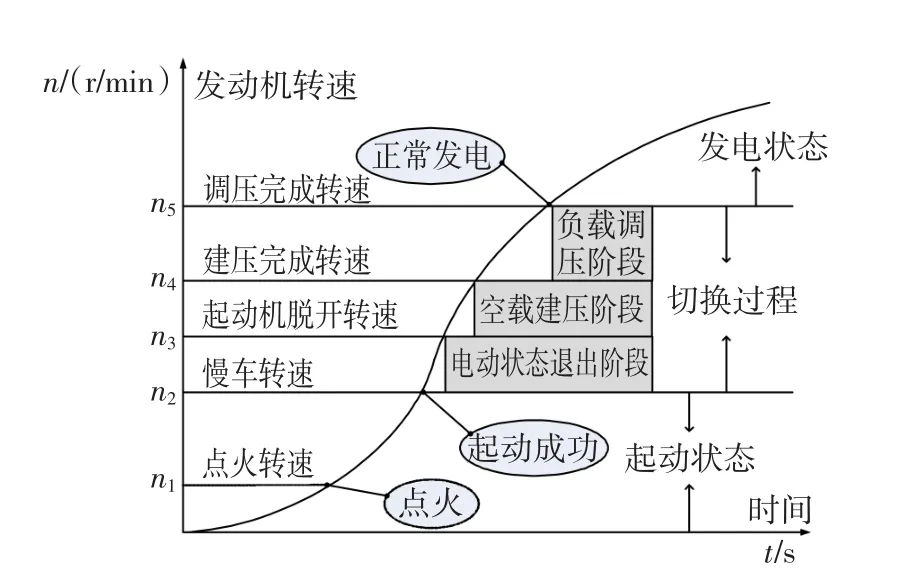
图1 切换过程原理图Fig.1 Principle diagram of switching process
1.1 空载建压阶段
刚进入发电状态时,由于初始的输出电压无论在幅值还是谐波分量上都不能满足飞机用电设备对供电品质的要求,因此开关磁阻电机进入发电状态的初始时刻并不能立刻将负载设备接入到开关磁阻电机的电压输出端,此时为用电设备提供电压(即汇流条电压)的仍是地面电源。而开关磁阻电机则工作在空载发电状态。此时的开关磁阻电机阻尼较小,有利于控制器在较快的时间内达到控制精确度的要求。只有当输出电压品质满足了GJB181A-2003对飞机供电品质的要求,才能将输出电压与汇流条接通,为飞机用电负载提供电能。
当前,对于建压问题的研究普遍集中在恒定负载情况下的建压,与负载建压相比,空载建压具有不同的优势特点:
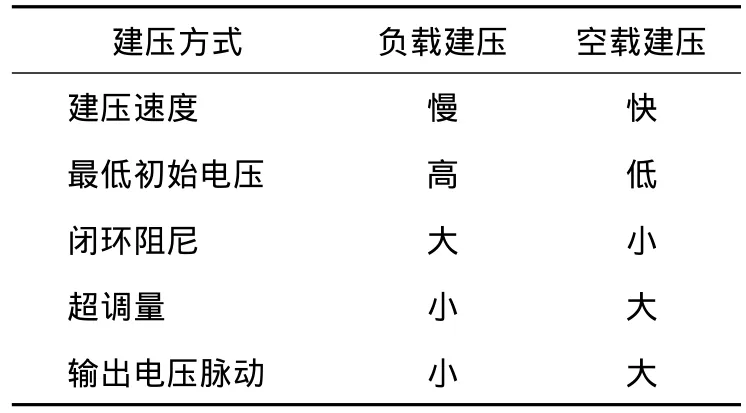
表1 两种建压方式比较Table 1 Two kinds of voltage build-up
1.2 额定负载调压阶段
在空载建压阶段完成后,发电机由空载运行状态突变为额定负载运行状态,突加负载必然导致输出电压在短时间内产生向下的跳变,同时产生较大的交流谐波分量。根据GJB181A-2003对飞机供电品质的要求,在正常工作时,飞机高压直流电源的供电电压幅值必须控制在250~280 V的范围内。因此在额定负载调压阶段,电压控制器的控制目标就是,通过改变开通角、关断角,调节开关磁阻电机的励磁过程,使得输出电压尽快恢复平稳,并满足GJB181A-2003对飞机供电品质的指标要求。
2 滑模变结构控制器设计
2.1 设计思想
在空载建压阶段,转速的迅速上升将对输出电压的控制产生较大影响,而在负载调压阶段,除了转速继续上升,同时负载的突变将造成输出电压产生明显的跳变。转速和负载是电机与外界进行能量交换的输入端口和输出端口,在电机内部无法进行控制,但又时刻作用于电机的运行过程和控制过程,因此考虑把它们作为系统输入的干扰,即将输出电压、相电流、转速以及负载作为一组全状态量反馈到控制器前端。其中,输出电压是系统的控制目标,控制器设计必须保证电机空载运行时快速无超调的到达额定电压,并在加入负载后保持平稳小波动,控制器根据转速和负载等干扰信号的变化,实时调整和校正控制参数,而相电流是系统控制的核心,由于对相电流的控制具有间接性和滞后性,只能通过调节励磁而达到控制目标。因此在控制器设计过程中,将全状态反馈量与目前常见的控制方式角度位置控制(angle position control,APC)和电流斩波控制(current chopping control,CCC)相结合,即在 APC与CCC的前端加入全状态反馈控制器,而全状态反馈控制器的输出用以校正和调节APC与CCC的控制参数。滑模变结构控制器的工作流程如图2所示。

图2 滑模变结构控制器工作流程图Fig.2 Work flowchart of the sliding mode variable structure controller
滑模变结构控制器的作用是:考虑转速值和负载电流的干扰作用,将敏感的输出电压误差信号反解算为3个控制参数(开通角θon、关断角θoff和斩波电流ichop)。从而可以更精确快速的敏感误差和干扰信号对系统的影响,达到更好的控制效果。
2.2 滑模变结构控制器的设计
由开关磁阻电机的内部原理以及外部功率电路构造可得SRG的电压方程为
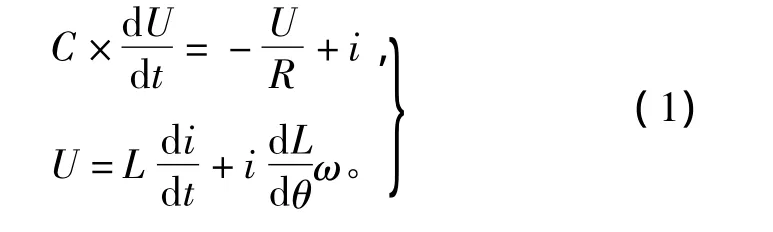
式中:C为功率电路的蓄电电容;R为负载电路总电阻;L为绕组电感。
滑模变结构的控制原理以相平面的控制为基础,根据SRG的电压方程,对整个系统的状态变量进行设计和构造
式中:Ur为给定额定电压;U为电机实际输出电压。
结合以上方程式(1)、式(2)可得系统的状态空间表达式

为了使控制系统无超调的到达稳定,选择一阶滑模面s=kx1+x2,其中k>0。选择全部状态变量反馈的滑模变结构控制方式,使得控制输出形式和PID控制表达式类似,即

式中:α,β为增益。

其中k>0,由上式解得

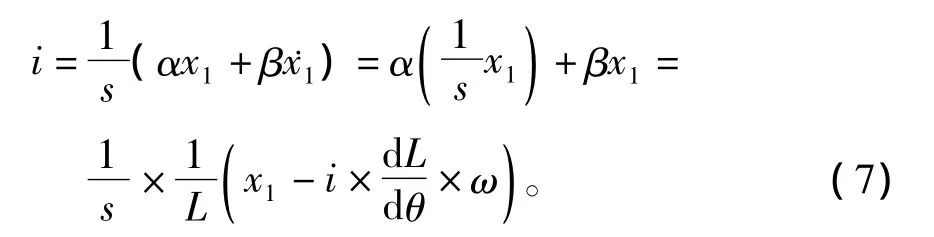
将式(5)代入式(4)可以得到控制器的输出u,然后将控制器输出经积分器输出,一方面是由于控制的非线性,系统存在抖振现象,输出经过积分器滤波可以削弱系统的抖振;另一方面,输出具有积分环节可以消除系统的稳定误差。因此,由上面各式可以得出系统最终的控制量i,其中α,β可以按式(6)取值。
滑模变结构控制器具体流程图如图3所示,ΔU、ωr、iR经过控制器和遗传算法寻优求得 θon、θoff、ichop;控制器根据Δi的大小来判断是否达到滑模面,不断地调整滑模面,使得整个控制系统空载运行时快速无超调地到达额定电压,加入负载后保持平稳小波动。

图3 滑模变结构控制器内部逻辑流程图Fig.3 Logic flow chart of the sliding mode variable structure controller
由滑模变结构控制理论的基本原理可知,系统动态过程由到达阶段和滑动模态运动阶段构成,故只要到达阶段趋近并进入滑动模态,然后保证滑模运动阶段稳定,系统稳定性就可以得到保证。
2.3 遗传算法寻优模块
图4中的遗传算法寻优模块(genetic algorithm,GA)是一种采用启发性知识的寻优算法,由于它仅需知道目标函数的信息,而对系统的连续性不作要求,因此可以满足开关磁阻电机非线性、离散性的特点,具有较高的适应能力。尤其在高维搜索空间(本模块为四维)上,遗传算法的寻优结果比梯度法等传统算法具有速度和精度上的优越性。但是遗传算法的寻优结果是唯一的,不能输出多组最优解。为了满足该寻优模块最优解不唯一的特点,在遗传算法的外层设计了GA的循环调用环节。GA的循环调用环节可利用遗传算法寻优过程具有随机性和不可重复性的特点,得到多组不同的寻优结果,以供后续模块继续筛选寻优,达到最终的结果。
选取遗传算法的循环调用次数为10,种群数量为80,繁衍代数为100,选取适应度函数为 F=1/(ie-iR)2,其中,ie为电枢输出电流,iR为负载电流。当负载电流为10 A,转速为1 000 r/min时,遗传算法的寻优误差如图7所示,可以看出,当繁衍代数达到50代以后,十组寻优误差达到最小并趋于稳定。将十组寻优结果进一步进行逻辑筛选,可得最终的控制参数为(37,72,18),即开通角 37°,关断角72°,斩波电流幅值为18 A。

图4 遗传算法寻优误差曲线图Fig.4 Error of optimization based on GA
3 仿真算例与实验验证
在控制器设计基础上,通过Ansoft软件进行有限元电磁分析,得到电机非线性数学模型,在Matlab环境中,建立了开关磁阻电机本体和控制器的仿真模型。并依托于实验室现有的条件进行了基于TI公司DSP-TMS320LF2407A的开关磁阻发电机控制系统的硬件设计,最后进行了开关磁阻发电机的建压和发电实验。开关磁阻电机的参数选择如表2所示。仿真和实验的目的在于,基于仿真和实验结果分析控制器对电机性能的影响,并将滑模变结构控制器的控制效果与传统的PID控制器控制效果进行分析比较,从超调量、响应时间、稳定性等方面对结果进行分析。
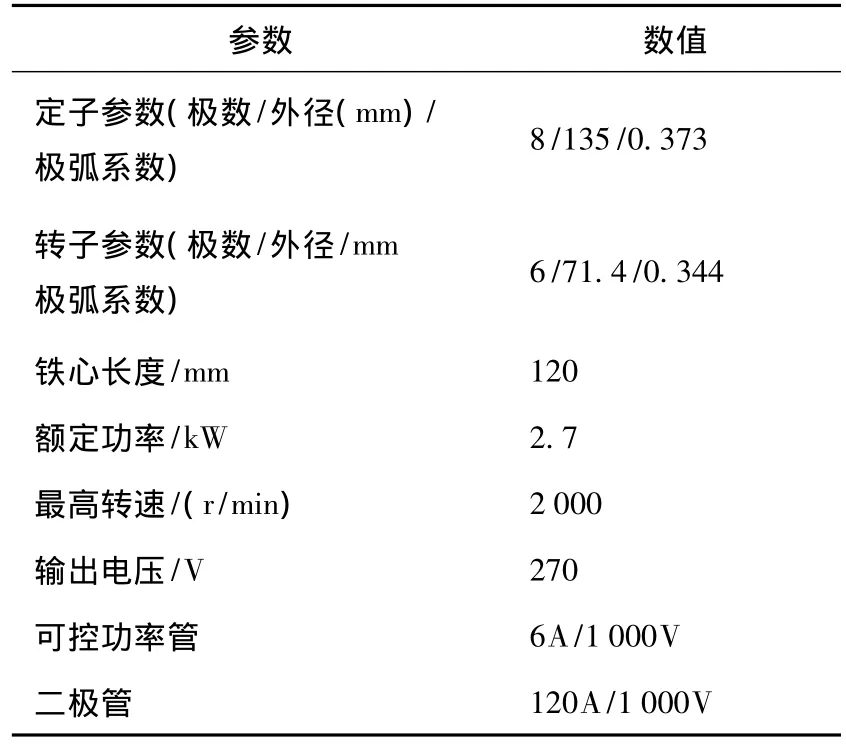
表2 仿真模型参数指标Table 2 Parameters of SIMULINK model
3.1 开关磁阻发电状态切换过程仿真与实验
开关磁阻发电状态切换过程为:保持原动机转速为斜坡转速,设定原动机转速初始值为1 000 r/min,并在0.4 s内以恒加速度迅速上升至2 000 r/min,电机由240 V以下开始空载建压,目标电压为270 V,建压成功并稳定后(输出电压幅值达到270 V,谐波含量达到国军标GJB181A-2003要求并持续10 ms时间以上),突加负载10 A,直至电压稳定。
图5和图6中的示波器1通道分别为斜坡转速状态下的开关磁阻发电机建压、调压过程电压瞬变仿真和实验波形。仿真开始时为建压过程,电压迅速上升,电机在0.18 s后建压稳定;在0.2 s时加入额定负载10 A,电机在0.04 s后重新达到稳定,超调量为1.7 V(0.63%)。
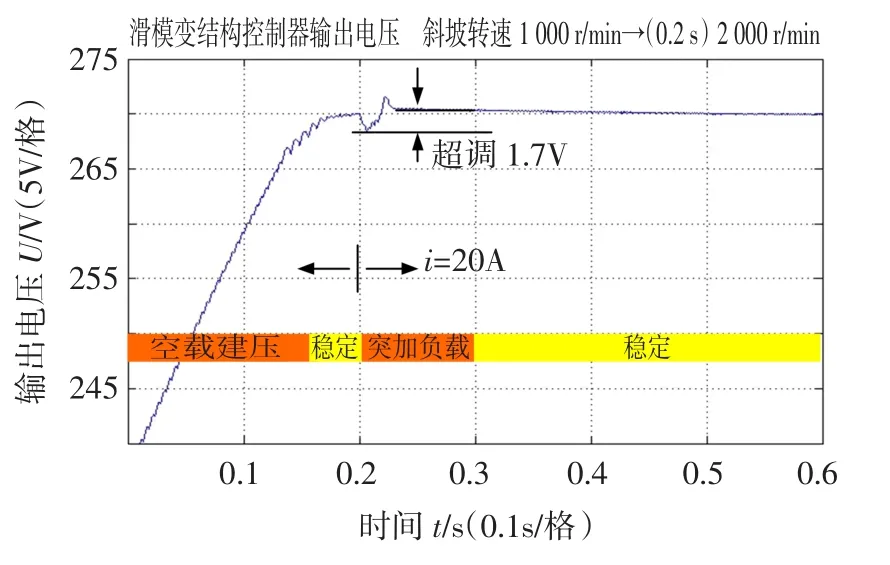
图5 斜坡转速状态下SRG输出电压仿真波形Fig.5 Output voltage of slope speed
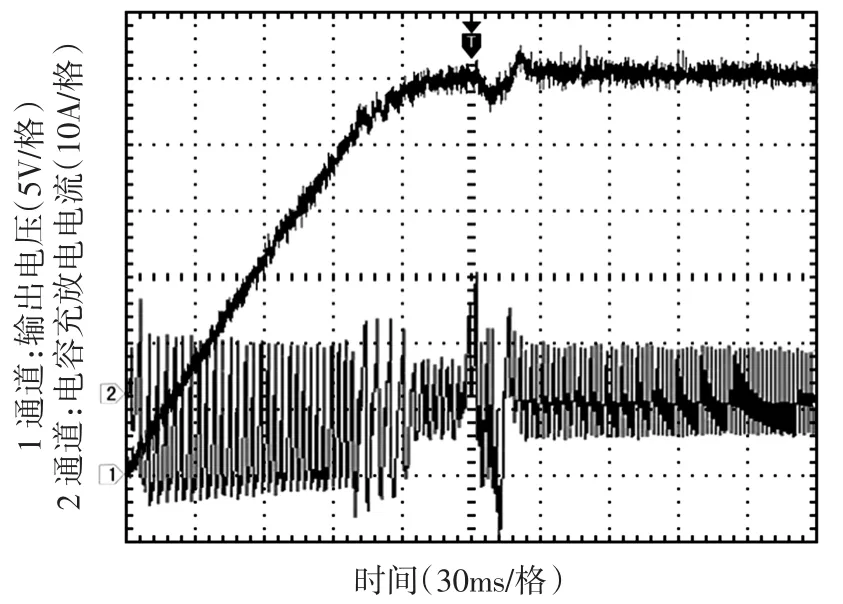
图6 斜坡转速状态下SRG实验波形Fig.6 Experimental waveforms of slope speed
图6 中的示波器2通道为整个过程中电容充放电电流的瞬变实验波形。从波形中可以看出,在控制器的作用下,通过调整功率管的开关时机,使得电容一直处于不断的充放电状态,且瞬时电压与目标电压相差越大,充放电越剧烈,当建压完成后,充放电幅度减缓,但随着负载突变而突变,最终趋于稳定。
图7为实验过程中输出电压、电枢电流随控制参数变化的关系图。从图中可以看出,在滑模变结构控制方式中,通过连续地改变斩波电流幅值,可以有效地改变三相电枢电流值,从而达到控制输出电压的目的,当输出电压在某一时刻产生较大的瞬间突变时,通过配合开通角 θon、关断角 θoff的变化,可以更快速地消除误差,达到稳定。
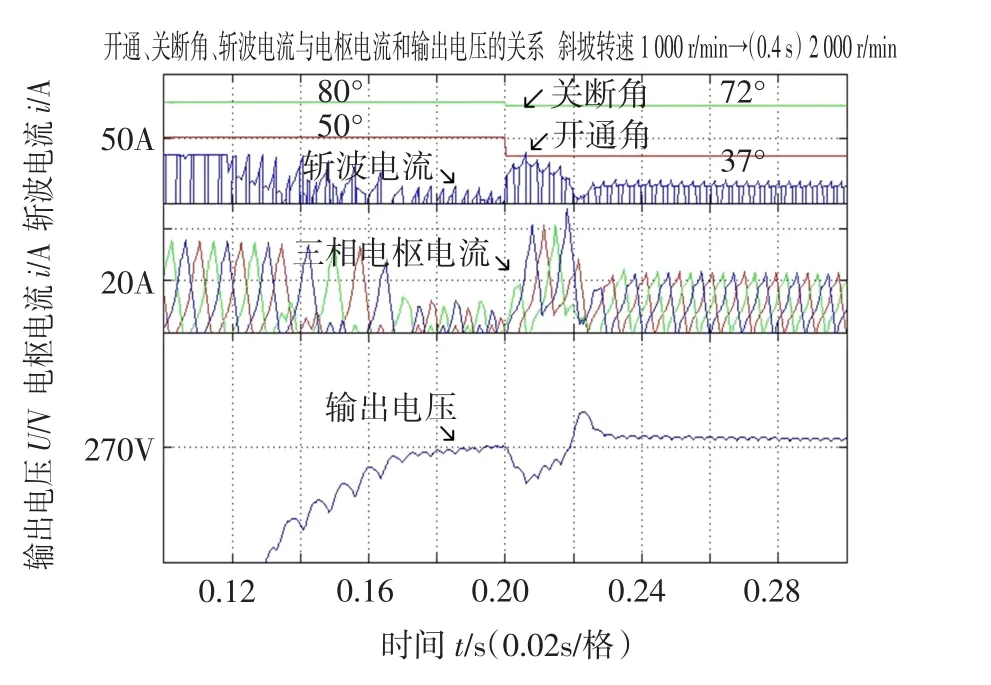
图7 输出电压、电枢电流随控制参数变化Fig.7 Output voltage and armature current response under the change of parameters
3.2 恒转速试验与斜坡转速试验比较
恒转速试验过程为保持原动机转速稳定在2 000 r/min,其他仿真和实验条件与恒转速试验保持一致。
图8为恒转速状态下的开关磁阻发电机建压、调压过程电压瞬变实验波形。仿真开始时为建压过程,电压迅速上升,电机在0.15 s后建压稳定,在0.2 s时加入额定负载10 A,最终在0.04 s后重新达到稳定,超调量为2.3 V(0.85%)。
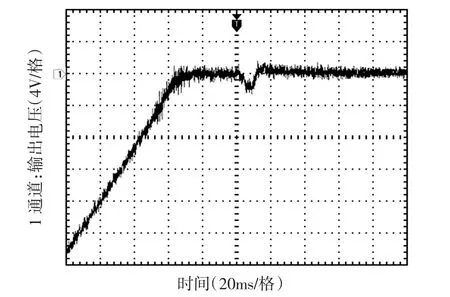
图8 恒转速状态下SRG输出电压实验波形Fig.8 Output voltage of constant speed
图9 为恒转速和斜坡转速下的开关磁阻发电机建压、调压过程电压瞬变仿真波形比较。从仿真结果可以看出,恒转速状态下的建压速度相比斜坡转速状态更快,这是因为,开关磁阻电机具有低转速出力大的自然特性,在斜坡转速状态中,随着转速升高,电机发电能力有所下降,不能像恒转速状态下保持较大出力直到电压达到建压值,但是恒转速起动的缺点是电压波动更加剧烈,在达到目标值后不能很快地保持并稳定下来。
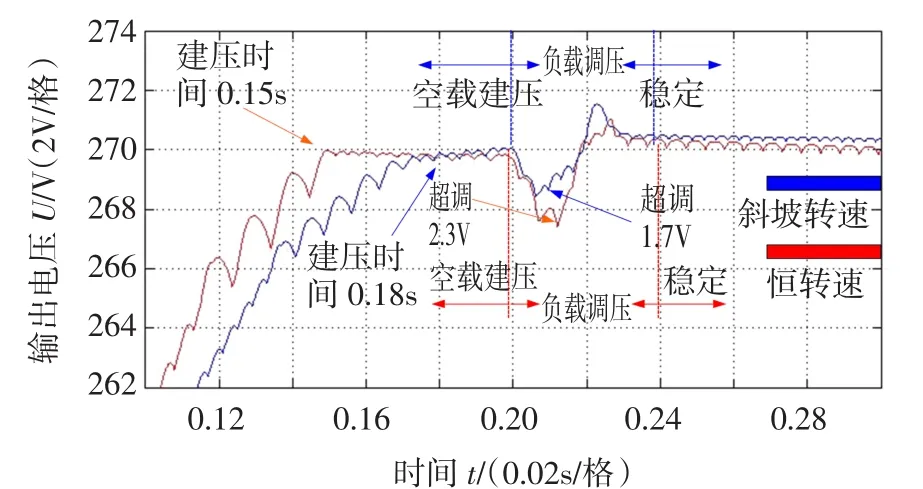
图9 恒转速与斜坡转速输出电压比较Fig.9 Comparisons of constant and slope speed
3.3 滑模变结构控制器与PID控制器比较
本实验对滑模变结构控制器与PID控制器的控制效果进行比较,原系统采用的是传统的APC和CCC相结合的控制策略,即固定关断角θoff、微调开通角θon的电流斩波控制,并且加入了以电流反馈为内环、电压反馈为外环的双闭环PID控制。PID控制器具有简单、快速的特点,并且其参数整定技术已非常成熟,可以达到较好的控制效果。
图10为PID控制方式下的开关磁阻发电机建压、调压过程电压瞬变实验波形,实验开始时为建压过程,电压迅速上升,经过一个7 V的超调(2.59%)后在0.35 s后建压稳定,在0.4 s时加入额定负载10 A,在0.06 s后重新达到稳定,超调量为4 V(1.48%)。
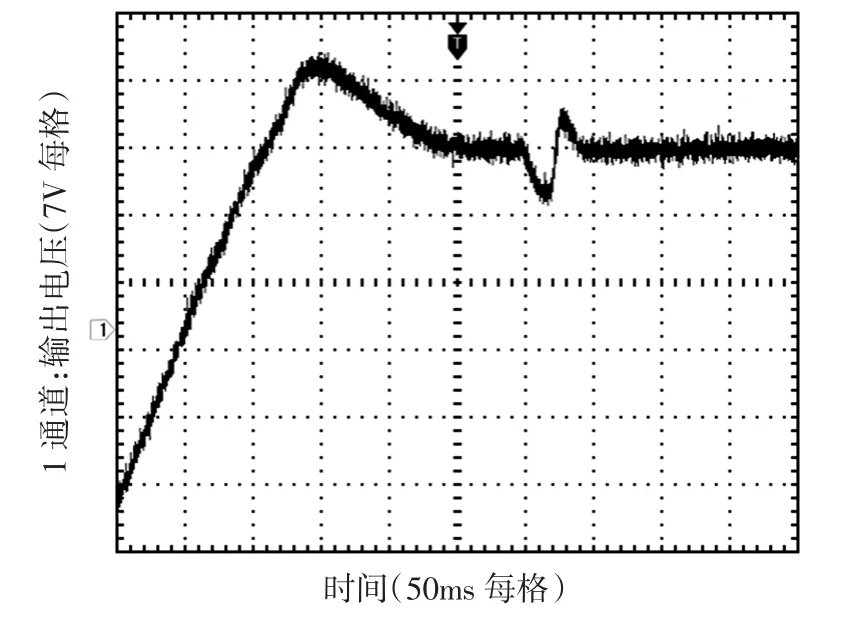
图10 PID控制方式下的输出电压实验波形Fig.10 Experimental waveforms of output voltage of PID controller
图11 把两种控制方式下电压仿真波形放在一起进行比较。表3为滑模变结构控制器与PID控制器仿真结果的一些具体参数比较。从图12和表3中可以看出,PID控制方式在建压过程中存在较大的超调,并且在负载突加阶段脉动变化更加剧烈和不稳定,相比而言,滑模变结构控制方式可以实现零超调建压,并在快速性、谐波含量等性能方面表现更加突出。

图11 两种控制方式下的输出电压比较Fig.11 Comparisons of two controllers in voltage

表3 两种控制器仿真结果的参数比较Table 3 Comparisons of parameters
4 结论
本文设计的滑模变结构控制器着眼于开关磁阻电机在切换工作状态时的发电机建压与调压问题,着重解决了运行过程中由于转速变化、负载变化等因素导致的电压脉动。并在快速性、平稳度方面提升了电机的控制效果。滑模变结构控制器充分发挥了SRG区别于传统发电机的控制策略灵活、可控参数多的优越性。仿真结果表明该控制器在提高SRG动态响应性能方面具有一定的优越性。由于控制器内部嵌入了遗传算法的循环寻优模块,使得控制器变得更加复杂、庞大,所以对计算机的处理速度提出了更高的要求。
[1]MACMINN S R,SEMBER J W.Control of a switched reluctance aircraft starter-generator over a very wide speed range[C]//Proceedings of the 24th Intersociety Energy Conversion Engineering Conf,1989:631 -638.
[2]RADUN A.Generating with the switched-reluctance motor[J].IEEE APEC,1994:41-47.
[3]DING Wen,LIANG Deliang.Comparison of transient and steady state performances analysis for adual channel switched reluctance machine operation under different modes[J].IET Electric Power Applications,2010,4(8):603 -617.
[4]丁文,梁得亮.双通道开关磁阻起动/发电机系统建模与仿真[J].电机与控制学报,2011,15(5):7 -15.DING Wen,LIANG Deliang.Modeling and simulation of dualchannel switched reluctance starter/generator system[J].Electronic Machines and Control,2011,15(5):7 -15.
[5]彭寒梅,易灵芝,朱建林.开关磁阻发电机输出电压脉动抑制的研究及仿真[J].系统仿真学报,2010,22(5):1237-1241.PENG Hanmei,YI Lingzhi,ZHU Jianlin.Study and simulation for switched reluctance generator output voltage ripple reduction[J].Journal of System Simulation,2010,22(5):1237 -1241.
[6]CHANG Yuan-Chih,LIAW Chang-Ming.On the design of power circuit and control scheme for switched reluctance generator[J].IEEE Transactions on Power Electronics,2008,59(1):445-454.
[7]邱鑫,张卓然,朱德明,等.双凸极无刷直流发电机在开关磁阻发电方式下的工作特性[J].中国电机工程学报,2010,30(21):54-60.QIU Xin,ZHANG Zhuoran,ZHU Deming,et al.Operation characteristics of switched reluctance generation mode for doubly salient brushless DC generator.[J].Proceeding of the CSEE,2010,30(21):54-60.
[8]陈志辉,周楠.30/20极混合励磁双凸极电机开关磁阻发电方式研究[J].中国电机工程学报,2011,31(15):94-100.CHEN Zhihui,ZHOU Nan.Switched reluctance generation characteristics of a 30/20-pole hybrid excitation doubly salient generator[J].Proceeding of the CSEE,2011,31(15):91 -100.
[9]Martin Liptak Valeria Hrabovcova.Equivalent circuit of switched reluctance generator based on series generator[J].Journal of Electrical Engineering,VOL 59,NO.1,2008:23 -28.
[10]Pandad,Ramanarayanan V.Mutual coupling and its effect on steady-state performance and position estimation of even and odd number phase switched reluctance motor drive[J].IEEE Transactions on Magnetics,2008,43(8):3445 -3456.
