磁致伸缩式惯性直线电动机
2015-01-13卢全国祝志芳
卢全国,赵 冉,祝志芳
(南昌工程学院,南昌330099)
0 引 言
惯性冲击电机是利用惯性冲击来实现精密位移的一种精密驱动机构,它具有运动范围大、位移分辨率高、结构简单的优点,并可在进行步进运动的同时实现精确定位[1]。目前,惯性冲击电机已在生物工程、微型零件操作与装配、机器人和医疗器械等领域获得初步应用[2-3]。
现有的惯性冲击直线电动机一般采用压电功能材料驱动,也就是利用压电陶瓷晶体逆压电效应,将电能转化为机械能。压电式惯性冲击直线电动机是利用压电材料在迅速通电或断电时的快速变形产生惯性冲击,继而形成驱动能力来实现精密位移的一种驱动机构[4-5]。上海大学研究了圆形压电双晶片驱动的管内移动机构,该机构尺寸16 mm ×9 mm,重9.5 g,可以在直径为20 mm 的管道内移动。台湾国立高雄第一科技大学研制了惯性冲击精密定位工作台,整个机构质量为187 g,定位精度可达到10 nm。国外关于压电惯性式精密驱动器的研究开展更为广泛,并已初步应用于精密加工、医学工程、光学精密工程等领域[6-7]。但是由于压电材料存在有缆驱动、变形量小、功率密度小、高电压驱动的不足,导致现有的压电式惯性冲击直线电动机存在运动稳定性较差、运动速度慢、负载能力弱、可靠性低的问题,因而在较大功率场合应用受到限制。
针对现有惯性冲击电机的不足,本文提出以超磁致伸缩材料为驱动源,构造一种新型的惯性冲击直线电动机[8]。超磁致伸缩材料是一种功能材料,它采用稀土元素铽、镝与金属铁,按一定比例进行熔炼并定向结晶得到的合金,其磁致伸缩系数比铁、镍等传统磁致伸缩材料高100 倍左右,因此被称为巨或超磁致伸缩材料。超磁致伸缩材料能有效地实现电磁能与机械能的转换,具有磁场驱动、变形量大、输出力大、能量密度大、机电耦合系数大、响应速度快、低压驱动的特点[9],适于构造各种精密驱动器件。
1 工作原理及驱动策略
1.1 工作原理
根据Higuchi T 等人提出的惯性冲击式工作原理[9]和超磁致伸缩材料特点,所提出的新型惯性冲击式直线电动机结构示意如图1 所示。
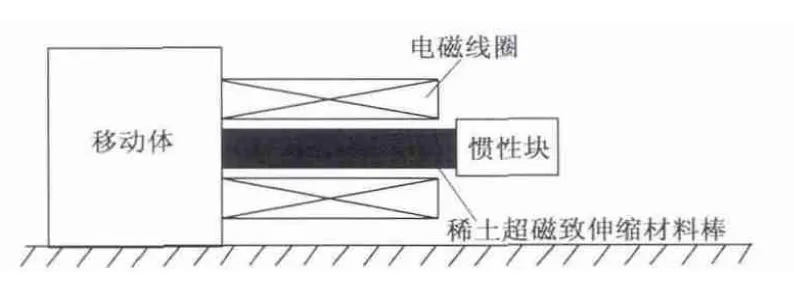
图1 磁致伸缩惯性冲击直线电动机示意图
通过适当的结构将超磁致伸缩棒一端固接惯性质量块,另一端固接移动体,磁致伸缩棒外部绕有电磁线圈。另外,结构中需要预紧装置,采用弹簧可提供一定的预压力,以消除间隙,特别当电磁线圈上的电流减小,超磁致伸缩棒回缩时,弹簧迫使质量块回位,使质量块始终与超磁致伸缩棒紧密接触。
对惯性冲击式直线电动机施加快升缓降或缓升快降的锯齿波信号时,由驱动元件和惯性质量块组成的冲击体会对电机主体产生惯性冲击力。当这个反向冲击力大于移动体与外界的摩擦力时,机构就可以产生运动;当这个反向冲击力小于或等于移动体与外界的摩擦力时,机构保持不动。通过控制信号的频率、波形和幅值,能够实现不同步长的双向连续运动。
1.2 驱动策略
无论压电式还是磁致伸缩式惯性冲击电机,传统的驱动方式都是采用连续的锯齿波信号。对于磁致伸缩式惯性直线电动机而言,需采用锯齿波电流进行驱动[10]。由于电机的驱动线圈电感量较大,易产生反向的拖尾电流,这就需要对电机的驱动电流进行闭环控制[11],从而增加了驱动的复杂性。为解决这一问题,本文采用了一种变频式的驱动控制策略,如图2 所示,驱动电流采用等占空比的锯齿波电流,通过电流幅值控制直线电动机的位移长度,通过改变频率控制电机的运动速度。在锯齿波驱动电流i 的作用下,惯性冲击电机将产生图2 中阶梯状的步进位移,步长以Δx 来表示。
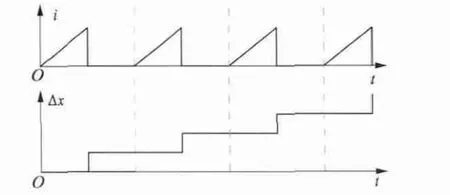
图2 控制策略
驱动电流的函数表达式可用下式表示:
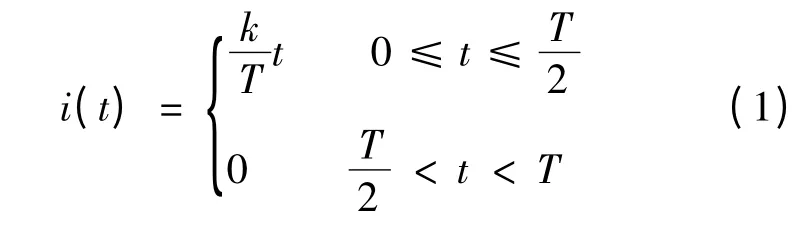
式中:T 为锯齿波函数的周期;k 为斜率。
2 电机运动方程
根据上文所述的电机运动原理,惯性冲击电机的运动主要与磁致伸缩材料的形变有关。已知磁致伸缩材料的形变与压应力及磁场之间的关系可由线性压磁方程来描述:
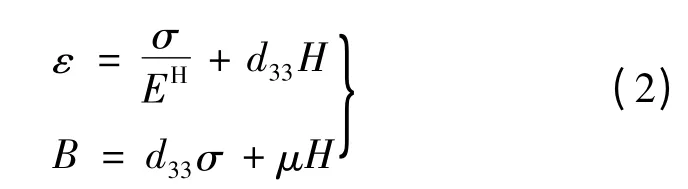
式中:ε 为材料的总应变;σ 为材料所受应力(取拉应力为正方向);d33为压磁系数;EH为杨氏模量;μ为材料相对磁导率。
在磁场作用下,磁致伸缩棒的长度变化为Δlr,在理想情况下,它等于惯性直线电动机的运动步长Δx。根据式(2)可得到步长与驱动磁场(电流)之间的关系[8]:

式中:lr为磁致伸缩棒长度;N 为驱动线圈匝数;kcoil为驱动线圈补偿系数;i 为驱动电流。
由式(3),惯性冲击电机的运动速度v 可以表达:

根据式(3)、式(4)可对电机的行进步长和运动速度进行计算和预测,为实现惯性直线电动机的闭环控制提供了条件。根据式(4)计算电机的运行速度,在3 A,40 Hz 条件下,可以计算得到电机运动速度值为51 μm/s。
3 实验结果及分析
本文中所设计的惯性直线电动机如图3 所示,图中①为配重块,②为电机主体(包含磁致伸缩棒与线圈),③为运动导轨。电机的基本参数:磁致伸缩棒尺寸为Φ50 mm ×100 mm;线圈匝数为1 200匝;驱动线圈补偿系数取1.11;压磁系数取18.86 ×10-3T/MPa;磁致伸缩棒直径为8 mm,配重块质量为0.06 kg。

图3 惯性直线电动机
为验证所设计惯性冲击电机的工作性能,搭建实验平台,如图4 所示,对电机的运动特性进行测试。图中功放AE-7224 将锯齿波信号进行放大以驱动电机,激光传感器用于测量电机的步长及运动速度。

图4 磁致伸缩惯性冲击电机实验系统
图5 为电机在3 A,40 Hz 驱动电流条件下的运动轨迹,其运动速度为50 μm/s。而根据式(3),在3 A 的驱动电流下,电机所得到的最大理想步长计算值为1.275 μm。由式(4)可以得到电机的运动速度计算值为51 μm/s。实验结果与本文所给的运动方程计算值较为符合,表明了理论计算的有效性。
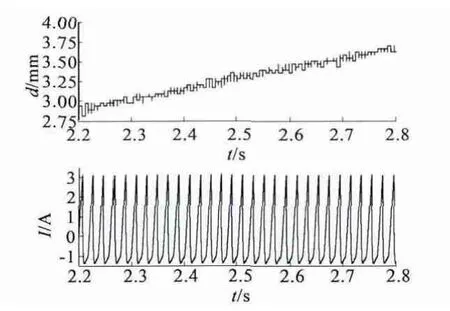
图5 3 A,40 Hz 驱动电流下电机运动轨迹
图6 为电机在不同驱动频率下的运动轨迹。当驱动电流的频率不断升高时,电机的运动速度也随之增加。电机的最高运动速度可达250 μm/s,且运动线性度较好。
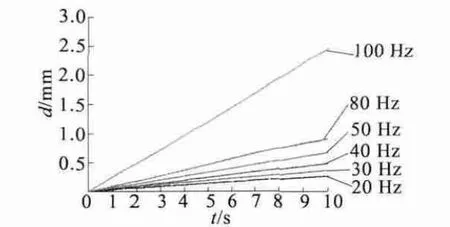
图6 不同驱动频率下电机的运动轨迹
4 结 语
本文提出了一种磁致伸缩棒伸缩式惯性直线电动机,并采用了一种新的变频控制策略来驱动电机。此外本文还根据线性压磁方程给出了电机的运动方程,该方程能够较为准确地计算电机的步长和运动速度。最后对电机的工作性能进行了测试,实验结果证明电机具有良好的线性度,其工作频率可达100 Hz,运动速度可达250 μm/s。
[1] 张宏壮,程光明,曾平,等.压电双晶片型2 自由度精密驱动器的动态特性[J].机械工程学报,2009,(2):87-91.
[2] 姜楠,刘俊标. 惯性冲击马达的建模与仿真[J]. 系统仿真学报,2009,21(24):7711-7714.
[3] 曾平,温建明,程光明,等. 新型惯性式压电驱动机构的研究[J].光学精密工程,2006,14(4):623-627.
[4] 卢秋红,高志军,颜国正,等.压电型惯性微驱动器研究[J].压电与声光.2004,26(2):112-115.
[5] 刘品宽,孙立宁,刘涛,等.惯性冲击式运动原理的理论分析与仿真[J].中国机械工程,2004,15(24):2217-2221.
[6] FURUTANI K,OHATA N. Positioning performance of L-shaped seal mechanismwith 3 degrees of freedom[C]//ceedings of the 2002 IEEE international conference on robotics & automation,2002:3660-3665.
[7] MENDES J,NISHMIURA M,TOMIZAWA K,et al. Prinetd board Positionnig system using impact[J]. SICE,1996,26(3):1123-1128.
[8] 卢全国. 一种磁致伸缩式惯性冲击微型直线电机:中国,ZL201010612116.2[P].2011-04-06
[9] 卢全国.基于GMM 的微致动研究及应用[D].武汉:武汉理工大学,2007.
[10] 卢全国,赵冉,曹清华.磁致伸缩式惯性冲击电机驱动电源研究[J].电力电子技术,2013,47(8):72-73.
[11] 赵冉,卢全国.基于Buck 电路的超磁致伸缩IDM 滞环电流控制[J].微特电机,2013,41(12):64-65.
