核电厂控制棒失步的判断方法
2016-05-30孙波
孙波
摘 要:本文介绍了控制棒驱动原理,从控制棒棒位测量指示、控制棒驱动电流、控制棒动作麦克风噪声三个方面提出了控制棒失步的判断方法。
关键词:控制棒;失步;驱动机构;棒位测量系统;驱动电流;噪声
在核电厂,控制棒和硼浓度是反应性控制的两大最重要手段。其中,硼浓度主要用于长期、起效慢的反应性控制;控制棒则用于短期、起效快的反应性控制。由于控制棒控制系统是一个开环控制系统,因此在出现故障后如何判断控制棒是否存在失步(不在指令要求的棒位)对于反应堆的控制有着极为重要的意义。
1 控制棒控制原理
控制棒控制系统的主要功能是根据电网负荷的变化,相应提升或插入控制棒调节堆芯的反应性,从而控制堆芯温度和核功率。一般来说,除了运行时为调节堆芯温度和功率以外,在反应堆启动试验阶段需要较多的提插控制棒。另外,为了验证控制棒的可用性,需要每月对近一个月内没有动过的控制棒进行手动提插棒验证。
控制棒驱动机构是一种步进式的提升机构,用来使控制棒组件在堆芯内提起、插入或保持在适当的位置,以实现反应性的控制。每个控制棒组件都由单独的控制棒驱动机构来驱动。控制棒驱动机构结构如图1所示。它主要由销爪组件、驱动杆、压力外壳、驱动线圈等部分组成,其中三个驱动线圈分别为夹持线圈、移动线圈和提升线圈,两个销爪分别为夹持销爪和移动销爪。控制棒与驱动杆相连,销爪通过钩入驱动杆上的齿槽抓住驱动杆,进而实现控制棒的提升、下插和保持。
三个线圈套在压力外壳外面,线圈通电则压力外壳内的相应销爪钩入控制棒驱动杆上的齿槽中,夹住驱动杆,线圈断电则对应的销爪靠弹簧力松开驱动杆。夹持销爪位置是固定的,移动销爪则可由提升线圈通电产生的电磁力带动提升一步的距离。静态时,仅夹持线圈通电,夹持销爪保持控制棒的位置不下落。控制棒提升时,移动线圈先通电,移动销爪钩入驱动杆中,然后夹持线圈断电,夹持销爪松开驱动杆,提升线圈再通电,带动移动销爪连同驱动杆上升一步,此后再转换为夹持线圈通电移动线圈断电,恢复到静态。控制棒下插也是类似的过程,只是每个线圈通断电的时序不同。控制棒控制系统接收来自主控的提升或下插的命令,产生送往三个线圈的电流,通过不同的电流时序组合,实现控制棒的提升和下插。
2 控制棒失步的后果
由于控制棒的位置与堆芯反应性紧密相关,因此核电厂技术规范中对控制棒的位置有严格的要求。当任意一束控制棒不在所要求的棒位时(通常称之为控制棒失步),反应堆必须在1小时内向次临界的蒸发器冷却停堆模式后撤。
如果失步步数较多,可能会触发反应堆中子通量保护,造成意外停堆。如果失步步数较少,也需要在1小時内判断出失步的控制棒并将其校正到要求的位置。
3 控制棒失步的判断方法
由于控制棒控制系统是一个开环的系统,仅对输出到三个线圈的电流有必要的监测,对控制棒是否按照命令完成提升或下插是无法准确判断的。因此当出现异常时,需要一些方法来判断控制棒是否失步及准确的失步步数。
3.1 根据棒位指示判断
控制棒棒位测量系统可以最直观的指示控制棒所处的位置。每一束控制棒驱动杆外都安装有一个棒位探测器,探测器内有一个通电的初级线圈及若干组不通电的次级线圈。棒位测量是根据电磁感应原理,当驱动杆位于不同的高度时,由于变压器的铁芯效应,在每组次级线圈中产生不同的感应电压,采集板件收集这些感应电压,编码后转换为控制棒的棒位指示。
控制棒的额定行程为225步,每步距离为15.875mm。由于棒位测量系统原理所限,其测量精度不高,每个棒位探测器包含5组次级线圈,因此可以产生个组合。225/32=7.03125,考虑上下端部扩展,因此每个组合代表的棒位变化为8步,即棒位指示系统的最小分辨率为8步。
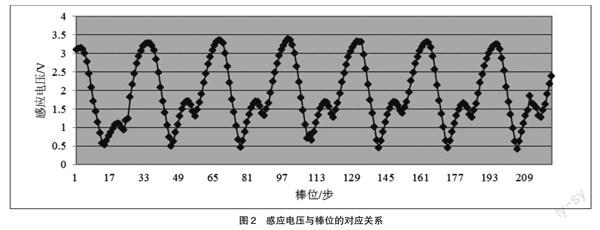
如果发生较多步数的失步,可以直接从棒位指示上看出来。如果仅仅发生一两步的失步,可能无法直接从棒位指示上发现,此时就需要根据经验判断。首先观察怀疑失步的棒束与同组控制棒的棒位指示是否一致(同组控制棒接受到的提插棒信号是相同的),然后可以小范围的操作该组控制棒提升或下插几步,观察该组控制棒的测量棒位是否同步变化。根据经验,同组控制棒的测量棒位变化应该是同步的或者最多相差一步。如果当时条件不允许提插棒,则可以直接测量棒位信号采集板件采集到的棒位探测器次级线圈感应电压,通过对比同组控制棒的信号电压来判断该组控制棒位置是否一致。一般来说,如果一组控制棒在同一位置,信号电压相差应该很小。图2为控制棒的一个次级线圈感应电压对应不同棒位的变化关系。
3.2 根据控制棒驱动电流波形判断
前面提到过,控制棒控制系统通过送往三个线圈的不同的电流时序组合,实现控制棒的提升和下插。因此,可以通过该电流正常与否来判断控制棒是否存在失步。
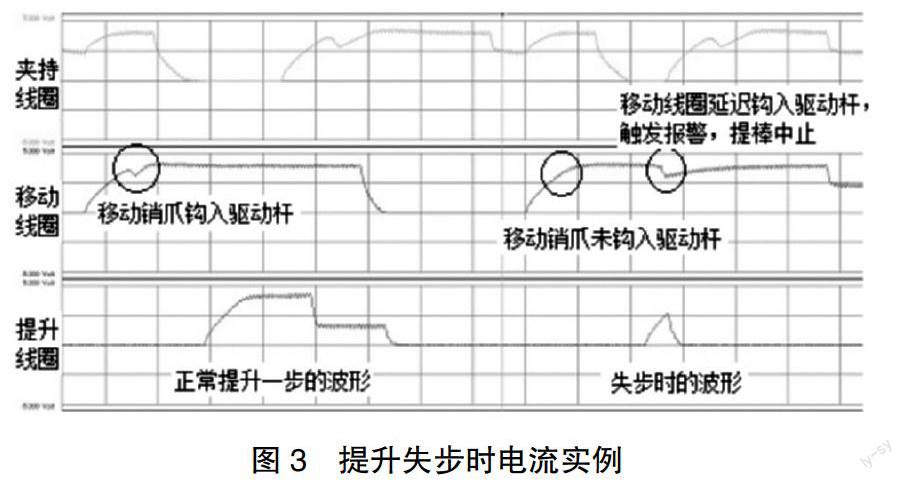
如图3是一束控制棒提升过程中发生电流异常,因而中断时序,最终检查发现滑落一步的电流波形。左半部分是前一个时序,完成正常提升一步,右半部分是故障波形。两者对比可以看出,在故障时序中,移动线圈电流在由零上升过程中没有出现正常应该出现的小凹槽,而这个凹槽代表移动销爪钩入驱动杆。在延迟一段时间(约180ms)后,出现了不该出现的凹槽,代表此时移动销爪才钩入驱动杆。由于电流波形畸变较大,触发了控制系统的报警,该提棒时序被中断,造成该束控制棒相比同组其他控制棒实际少提了一步。
进一步分析表明,移动销爪延迟钩入驱动杆的时间点与夹持线圈电流开始下降的时间点相差约120ms,这个时间与夹持销爪释放的时间基本吻合。因此可以推断,夹持销爪释放后,控制棒由于重力下落,而先前由于某种原因未能钩入驱动杆的移动销爪在此时意外钩入驱动杆,阻止了控制棒下落过程。
3.3 根据控制棒动作麦克风噪声判断
在调试及每个大修启动阶段,维修人员会在反应堆顶部控制棒导向筒顶端安装麦克风,用来采集控制棒动作期间因振动而产生的噪声信号。
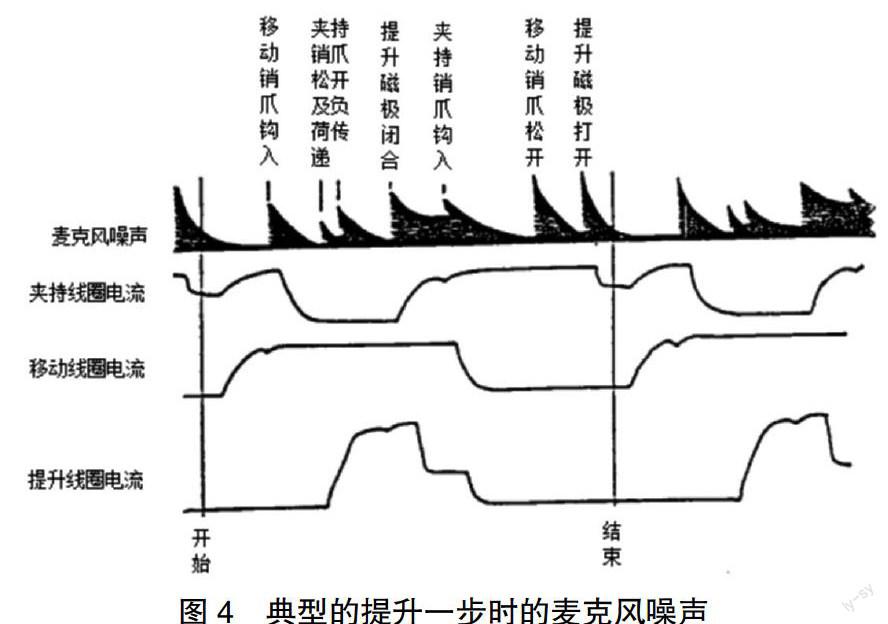
如图4,以提升一步为例,典型的麦克风噪声会出现7个波峰,分别代表移动销爪钩入驱动杆、夹持销爪松开驱动杆、负荷从夹持销爪传递到移动销爪、提升磁极闭合(移动销爪带着驱动杆上升到位)、夹持销爪钩入驱动杆、移动销爪松开驱动杆、提升磁极打开(移动销爪回落到位)。若其中任何一个波峰没有出现则可能意味着相应的驱动机构没有动作,可能带来控制棒提升的失败,进而引起销爪无法钩入驱动杆而失步。
比如在图3中移动线圈电流在上升过程中没有小凹槽,代表移动销爪没有钩入驱动杆,自然无法完成提棒。此外,还出现过最后一个波峰出现时间过晚,导致提棒失败。最后一个波峰时间过晚表示提升线圈断电后移动销爪回落到位过晚,如果还没有回落到位而下一个提棒时序已经开始,就无法完成提棒。
通过麦克风噪声判断控制棒提插棒情况是最直观的方法,不过该方法需要两个条件:①控制棒导向筒顶端安装麦克风;②将麦克风噪声信号连同驱动线圈电流信号接入录波装置。但是设计上系统并未预留这些配置,因此仅在每轮大修启动试验阶段对部分控制棒组采集并分析这些信号。
4 控制棒失步的原因分析
每一次控制棒失步的故障表现均不一定相同,通过分析多起控制棒失步事件,可以歸纳出以下几个原因:
①控制系统故障,造成驱动线圈电流异常。
②销爪动作异常,夹持或移动销爪没有钩入或延迟钩入驱动杆。
③移动销爪回落时间过长,与后一步造成干扰。
其中,仅第一个原因是源自于控制系统自身故障,也易于验证和排除。其余两个原因均属于驱动机构机械方面的异常,往往是偶然出现一次后又消失,很难得到直接证据,只有通过驱动线圈电流录波和麦克风噪声录波等手段推断得到。根据国内外核电厂相关故障检查的反馈,这种偶然发生的驱动机构动作异常往往与异物卡涩、温度等因素相关。
5 结束语
通过棒位测量指示系统、驱动线圈电流录波、麦克风噪声录波等手段均可以明确判断出控制棒是否发生失步,但在实际故障处理时的难点在于如何快速判断失步并定位故障点,此时就需要结合实际情况综合考虑。一般是通过对比棒位测量指示快速判断并消除故障,再分析录波波形定位故障原因。
参考文献:
[1]大亚湾核电站控制棒控制系统设计手册(SDM).
[2]大亚湾核电站控制棒控制系统维修手册(EOMM).
[3]大亚湾核电站控制棒棒位测量系统维修手册(EOMM).
[4]大亚湾核电站控制棒驱动机构维修手册(EOMM).
[5]大亚湾核电厂运行技术规范[Z].25版.2015.
