改进PID算法在气动位置伺服控制系统中的应用
2015-01-02林黄耀
林黄耀
(湄洲湾职业技术学院机械工程系,福建莆田351254)
气动位置伺服控制系统具有很强的非线性,这主要是由于气体的可压缩性、阀口复杂流动特性等因素的影响,因此气动位置系统的数学模型十分复杂,且模型中存在某些未知的参数,很难获得精确的数学模型,无法使用基于精确数学模型的一些控制方法(如自适应控制、极点配置方法等).本文采用传统的PID控制方法对气动位置控制进行了研究,通过调整比例、积分、微分三个参数对系统进行控制.这种控制算法由于简单实用,已被广泛用于工业领域,特别是过程控制领域.
1 常规位置式PID控制器
常规位置式PID控制器利用了实际值与目标值的偏差,将偏差的比例、积分、微分各环节通过线性组合构成控制量,对被控对象进行控制.其离散形式为

其中,u(k)是第 k次采样时刻计算机的输出,kp=KP,ki=KPT0/TI,kd=KPTD/T0,ki、kd分别称为积分系数和微分系数.
2 位置式PID控制仿真结果及分析
采用(1)的控制规则,在建立的系统数学非线性模型上进行仿真,仿真中选取不同的参数得到位移响应曲线如图1和图2所示.在图1中,kp为10,ki为30,kd为3;在图2中,kp为11,ki为6,kd为3.可以看出,图1中由于积分常数取得较大,系统出现了超调和积分饱和现象,不能稳定在目标位置附近;图2中由于积分系数取得较小,系统响应平稳,无超调,但其响应速度比较慢.由此可以看出,常规PID针对本系统还存在着不足,在应用于实验系统之前要先对其进行改进.
3 位置PID控制算法的改进
从上面的仿真结果分析中可知,由于在位置PID控制器中,积分系数ki在系统工作过程中是常数,在整个控制过程中,积分作用不变.当积分作用太强时,会使控制的动态性能变差以至于造成系统的不稳定.一般在误差比较大时,若引入积分作用,由于积分的记忆性,则在系统接近目标值时,容易使控制量保持很大值,使系统产生大的超调,不能快速精确地定位.因此,可以采用另外一种改进的PID控制算法,如(2)所示.
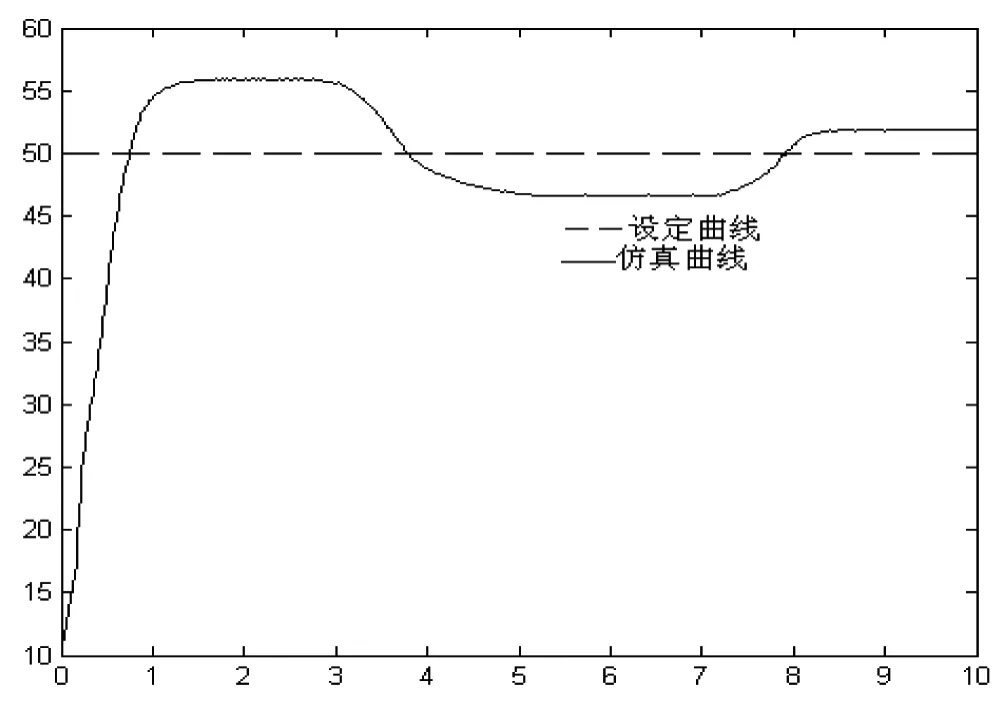
图1 积分系数较大时的位置PID控制阶跃响应仿真曲线
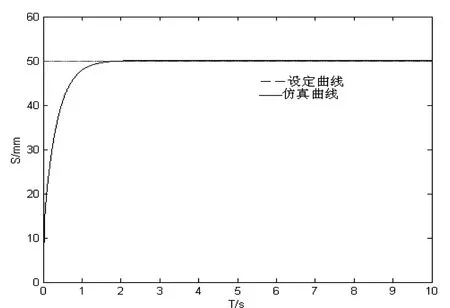
图2 位置PID阶跃响应仿真曲线

其中

称(3)为变速积分PID算法,其中A、B为常数,其设计思想为设法改变积分项累加速度,使其与偏差大小相对应:偏差越大,积分越慢;反之则越快.可以看出,当|e(k)|增大时,f(e(k))减小,反之则增大.f(e(k))值在[0,1]区间变化,当某一时刻偏差|e(k)|大于A、B的和时,则积分环节不对该时刻的偏差进行累加,即f(e(k))=0;当某一时刻的偏差e(k)小于等于B时,加入当前值e(k),积分环节与普通的PID积分项相同,积分速度最高;当偏差e(k)介于B和A+B之间时,则累加的该偏差的倍数用差值方法来计算.偏差越大积分越慢,偏差越小积分越快,且积分的速度是连续变化的.变速积分与积分分离控制方法很类似,但调节方式不同,前者对积分项采用的是缓慢变化,而后者则采用开关控制,而且变速积分对A、B两参数的要求不精确,因此使得变速积分调节质量更高.
这里我们采用变速积分控制对系统位置定位控制进行阶跃响应实验.在实验中,B和A+B的值均可从面板上进行赋值.将初始位置在10mm处,让其向右运动.实验中B取为0.5mm,A和B的和取为10mm,输入50mm的阶跃信号进行实验,得到的阶跃响应曲线如图3所示,实验中kp取值不同,ki为0.01,kd为12.
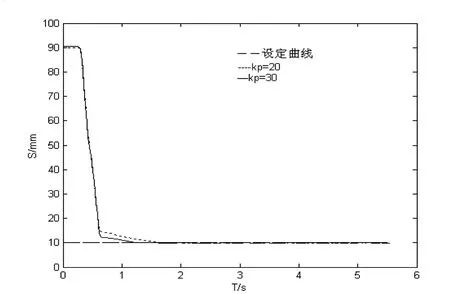
图3 变速积分阶跃响应实验结果

将(2)代入(4)得

则(5)是通用的增量型PID算式.
在本系统中,采用增量式算法,计算机输出的控制增量Δu(k)对应的是比例流量阀开口的增量.虽然增量式算法与位置式算法并无本质区别,只是算法上作了一点改进,但相对于位置式控制算式却有以下优点:第一,因为输出是增量,即使偏差长期存在,输出Δu(k)一次次积累,最终可使执行器到达极限位置,但只要偏差Δe(k)换向,Δu(k)也立即变号,从而使输出脱离饱和状态,消除了发生积分饱和的危险;第二,输出只是增量,计算机误动作时造成的影响比较小,且控制平稳,必要时可用逻辑判断的方法去掉;第三,增大初始的控制量,提高系统的响应速度.
图4为增量PID控制器的实验曲线.可以看出,系统的响应速度得到提高,控制也比较平稳.
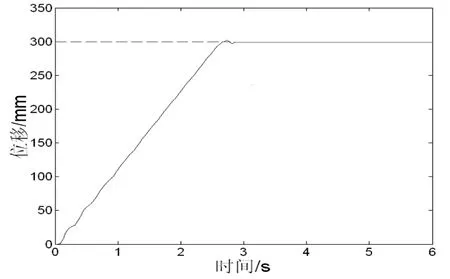
图4 增量式PID控制实验图
4 结语
综上所述,本文采用了常规的位置式PID控制方法对系统位置定位控制进行了仿真,仿真结果表明,位置式PID对积分参数的变化很敏感,系统会出现超调和积分饱和现象,不能稳定在目标位置附近,而当我们调整参数,满足系统稳定、无超调、高的定位精度要求时,系统的响应速度又会变慢.
并且,针对常规的位置式PID控制算法的不足,对其中的积分环节进行改进,提出了变速积分PID控制算法.采用变速积分PID控制算法对位置定位控制进行了实验研究.实验结果表明,该方法的系统响应速度比较快,具有一定的定位精度,稳态误差的绝对值在0.5mm内.由于位置式项不仅计算繁琐而且占用很大的内存,使用也不方便.所以我们又应用增量式PID对位置控制进行了实验研究.实验结果表明,该算法响应速度快,控制精度高,控制平稳.
[1]裘华徕.气动技术的近期发展及其影响因素[J].液压气动与密封,2002(3):1-3.
[2]李素玲,刘军营.比例控制与比例阀及应用[J].液压与气动,2003(2):30-32.
[3]王永昌,潘先耀.气动伺服控制系统及阀的应用形式[J].燕山大学学报,2002(3):206-208.
[4]庞国仲.自动控制原理[M].合肥:中国科学技术大学出版社,2010.
