直线一级倒立摆的新型控制方法研究
2015-01-01孔庆忠徐禄均
王 杰,孔庆忠,徐禄均
(内蒙古工业大学 机械学院,内蒙古 呼和浩特 010051)
0 引言
倒立摆的稳定控制在生活和生产中的应用非常广泛。传统的PID控制虽然能够完成响应,如果效果不是特别明显,如果将小车控制器设计成模糊PID控制器,并与摆杆闭环控制进行封装,形成一个双闭环PID控制器,就能够更好地实现倒立摆系统的控制。
1 直线一级倒立摆的稳定性
直线一级倒立摆系统由小车、摆杆等组成,它们之间自由连接。在进行系统稳定性分析时,一般可以应用LaSalle’s Theorem或者是李亚普诺夫稳定性理论。本文根据系统未进行矫正时的阶跃响应曲线来讨论系统的稳定性,利用MATLAB进行阶跃响应分析,结果如图1、图2所示。
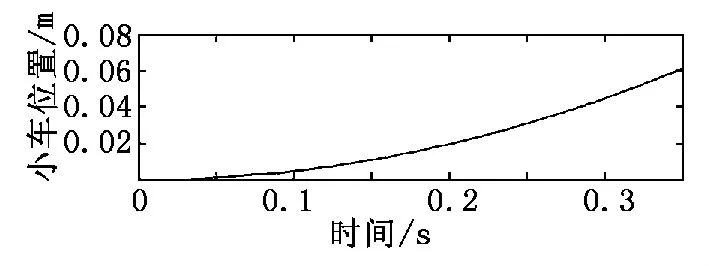
图1 系统未矫正时小车位置的阶跃响应曲线

图2 系统未矫正时摆杆摆角的阶跃响应曲线
从图1和图2中可以看出,在阶跃响应信号的作用下,摆杆的角度以及小车的位置曲线都是发散的,即在没有使用控制器进行矫正之前,本系统在期望的平衡位置是一个非稳定系统。因此,系统需要矫正,使其变得稳定。由于直线一级倒立摆在平衡位置是能控的、可观的,因此可以进行PID控制器设计,使系统稳定。
2 倒立摆摆杆与小车的传统PID控制
2.1 倒立摆摆杆的传统PID控制
把小车置于导轨中间位置,打开实验设备,并且将摆杆手动提起置于倒立位置保持不动,然后单纯对摆杆进行PID控制。根据多次实验仿真可知:当PID控制器中比例系数Kp=30,积分系数Ki=20,微分系数Kd=2.5时,得到的仿真效果最佳。所以,将3个参数按照此值进行调节,得到的仿真曲线如图3、图4所示。

图3 传统PID控制 下摆杆仿真曲线

图4 传统PID控制下小车位置仿真曲线
在0.3s~0.5s时刻,为手动提起过程,从图3、图4可知,此过程中摆杆的角度不断增加,当时间达到0.5s之后,摆杆在PID控制器的控制下能够自动保持倒立不倒,维持平衡不倒,小车也能维持短暂平衡状态;时间达到1.3s时,小车曲线出现突然下降,此时摆杆的角度突然增大,之后小车位置不再变化,摆杆的角度在此后出现大幅度震荡,摆杆在重力作用下向初始位置运动,此时小车在导轨上运动到极限位置,出现阻碍后就不再运动,也就不能给摆杆倒立不倒的力;在2s之后,小车的位置保持不变,也就是处于静止状态,摆杆在重力作用下,由于惯性作用继续左右摆动,能够维持短暂的自由摆动,直至能量消耗完就静止。所以,单独对摆杆进行PID控制器控制,能够达到最终目的,但是稳定效果不是特别明显。
2.2 倒立摆小车的模糊PID控制
为保证摆杆直立运动,小车必须拥有合适的位移以及速度。但是对于由伺服电机带动的小车来说,不能精确地给出数学模型以及传递函数。因此,在对摆杆进行角度检测之后,对小车的控制采用模糊PID控制。当摆杆在直立的平衡位置范围内摆动时,控制小车的速度及位移,使摆杆直立不倒。对于摆杆来说,起摆的速度和加速度比较大,当达到平衡位置时,加速度在较小范围内变化。用模糊PID控制倒立摆小车得到的仿真曲线如图5所示,此时倒立摆摆杆的仿真曲线如图6所示。

图5 模糊PID控制下小车位置仿真曲线

图6 模糊PID控制 下摆杆仿真曲线
在这种单一对小车进行模糊控制的情况下,小车运动稳定,倒立摆摆杆的运动在单位时间内是稳定的,但是在整个控制过程中是不稳定的。这种控制效果虽然也能够达到让倒立摆摆杆倒立稳定的目的,但是,控制效果并不理想。为了能使摆杆得到更加优良的控制,实现理想的控制效果,还可以寻找更好的控制方法。
3 倒立摆摆杆与小车的新型PID控制
根据上述两种控制进行综合分析,单纯对摆杆进行PID控制可以使系统维持短暂时间的稳定,当小车遇到极限位置时系统停止运动;单纯对小车进行PID控制时,系统更加不稳定,鲁棒性能效果不理想,稳定时间变得更小。因此,在上述理论的基础上,分别将两个控制器进行组合,形成双PID控制组合,得到的倒立摆系统闭环PID控制器如图7所示。利用这种双闭环控制器,得到倒立摆的实时控制仿真曲线,如图8、图9所示。
从图8、图9可以很清晰地看到,摆杆在两个控制器的控制下维持倒立稳定,虽然小车仿真曲线出现震荡,但是小车可以在导轨上的某个范围内一直运动,保证摆杆倒立不倒。本实验仿真结果显示:双闭环控制器对此倒立摆系统具有很好的控制作用。

图7 倒立摆系统闭环PID控制器

图8 闭环PID控制下小车位置仿真曲线

图9 闭环PID控制 下摆杆仿真曲线
4 结论
单独对摆杆进行PID控制器控制,能够达到最终目的,但是稳定效果不是特别明显。单独对小车进行模糊PID控制,也能达到最终目的,效果仍然不是特别明显。在分析这两个单独的控制器的基础上,将两个独立的控制器进行组合封装,形成一个双闭环PID控制器,能够很好地实现倒立摆系统的控制,最终达到理想的效果。
[1] 黄宏格.直线倒立摆机理模型及控制性能研究[D].长沙:中南大学,2008:5-6.
[2] 王雪.基于小车倒立摆的自动控制原理开放性实验的开发与研究[D].重庆:重庆大学,2007:25-27.
[3] 徐雄,石曙东.基于 Matlab的实时模糊控制系统的研发[J].湖北师范学院学报,2007(3):79-81.
[4] 王孝莉.倒立摆智能控制系统的研究[D].济南:山东大学,2007:35-38.